Управление нормальным режимом работы
Оперативное управление режимами работы объектов оперативно-диспетчерского управления в нормальных условиях осуществляется в соответствии с заданным диспетчерским графиком (разработанным при краткосрочном планировании).
Коррекция диспетчерского графика осуществляется при изменении режимных условий и фиксируется в оперативно-диспетчерской документации с указанием причин коррекции. Обо всех вынужденных отклонениях от заданного диспетчерского графика оперативно-диспетчерский персонал обязан немедленно доложить диспетчеру вышестоящего уровня.
Электростанции обязаны по распоряжению диспетчера энергосистемы немедленно повышать нагрузку до полной рабочей мощности или снижать ее до минимума. При необходимости диспетчер вышестоящих уровней (ЦДУ, ОДУ, ЦДС) должен дать распоряжение о включении агрегатов из резерва или вывод их в резерв.
На электростанциях АО «Энерго», ОЭС, ЕЭС России должно осуществляться непрерывное круглосуточное регулирование текущего режима по частоте и активной мощности, обеспечивающее:
· исполнение заданных графиков активной мощности;
· поддержание частоты в нормированных пределах;
· поддержание перетоков активной мощности, исходя из условий обеспечения надежности функционирования ОЭС и ЕЭС России;
· корректировку заданных диспетчерских графиков и режимов работы ОЭС и ЕЭС России при изменении режимных условий [2].
Регулирование частоты и перетоков активной мощности должно осуществляться совместным действием систем первичного и вторичного регулирования.
1 этап – первичное регулирование. Осуществляется всеми электростанциями путем изменения мощности под действием автоматических регуляторов скорости (АРС). Эффективность первичного регулирования частоты зависит от статизма регулятора скорости.
2 этап – вторичное регулирование (для дополнительной корректировки). Осуществляется оперативно либо автоматически (с использованием систем автоматического регулирования частоты и перетоков мощности – АРЧМ) выделенными для этих целей электростанциями. В целях непротиводействия первичному регулированию вторичное регулирование должно осуществляться с коррекцией по частоте.
После изменения мощности, вызванного изменением частоты, персонал электростанций вправе вмешиваться в процесс регулирования мощности в следующих случаях:
· после восстановления частоты 50 Гц;
· с разрешения диспетчера ЦДС;
· при выходе мощности за допустимые при данном состоянии оборудования пределы.
При регулировании напряжения в электрических сетях должно быть обеспечено:
· соответствие уровня напряжения требованиям ГОСТ 13109–97;
· соответствие уровня напряжения значениям, допустимым для оборудования электрических станций и сетей с учетом допустимого эксплуатационного повышения напряжения промышленной частоты на электрооборудовании (в соответствии с данными заводов изготовителей и циркуляров);
· необходимый запас устойчивости энергосистемы;
· минимум потерь электроэнергии в электрических сетях.
Регулирование напряжения должно осуществляться средствами автоматики и телемеханики, а при их отсутствии – оперативно-диспетчерским персоналом энергообъектов под контролем диспетчера вышестоящего уровня.
Помимо этого, выполняя свои функции по ведению нормального режима, диспетчеры всех высших уровней и дежурный персонал оперативных подразделений более низких ступеней управления производят:
· контроль и изменение схемы электрической сети;
· вывод оборудования и ввод его в работу;
· контроль за устройствами оперативного управления, РЗ и противоаварийной автоматики, вывод из работы и ввод в работу;
· проведение испытаний, ввод нового оборудования в работу;
· передачу оперативной информации и ведение оперативной отчетности.
Управление энергосистемами в аварийном режиме
Все технологические нарушения в электрических системах можно условно разбить на три группы:
1) нарушения на электростанциях;
2) нарушения на подстанциях и в электрических сетях;
3) нарушения, вызывающие расстройство работы энергосистемы в целом.
Преобладающая часть (80  90 %) всего недоотпуска электроэнергии приходится на аварии в электрических сетях. Аварии на электростанциях приводят к 10 20 % суммарного недоотпуска и этот недоотпуск в значительной мере вызван авариями в районах со слабыми электрическими связями или на изолированно работающих электростанциях.
90 %) всего недоотпуска электроэнергии приходится на аварии в электрических сетях. Аварии на электростанциях приводят к 10 20 % суммарного недоотпуска и этот недоотпуск в значительной мере вызван авариями в районах со слабыми электрическими связями или на изолированно работающих электростанциях.
Наиболее тяжелыми являются системные аварии. Одиночные отключения элементов обычно приводят к перераспределению потоков мощности по оставшимся в работе элементам без ущерба для электроснабжения.
К системным авариям относятся аварии с нарушением устойчивости и разделением энергосистемы, вызывающие отключение потребителей общей мощностью более 5 % нагрузки отделившейся части, а также длительная работа энергосистемы с частотой ниже установленного предела (для обычных условий – ниже 49,5 Гц длительностью более 1 часа). К системным авариям отнесены также вызванные стихийными явлениями массовые повреждения линий электропередачи, приведшие к отключению потребителей общей мощностью более 10 % всей нагрузки энергосистемы.
Для большинства системных аварий характерно каскадное развитие аварийных процессов. Анализ аварий показывает, что их перерастание в системные аварии обычно является следствием ряда утяжеляющих аварийные процессы факторов.
Важнейшими из них являются:
· ограниченность резервов мощности;
· недостаточная пропускная способность электрических связей;
· неправильная работа устройств РЗ и А;
· недостаточная оснащенность энергообъектов средствами ПА;
· недостаточно надежная работа выключателей;
· неправильные действия персонала.
Как отмечалось ранее, высокая скорость протекания аварийных процессов практически исключает возможность участия человека в управлении аварийными режимами в электрических системах.
Однако персонал должен ориентироваться в сложных аварийных ситуациях, понимать их сущность и уметь правильно действовать в случаях, когда автоматическая ликвидация аварии не успешна.
В первую очередь для понимания принципов эксплуатации энергосистем необходимо иметь представление об опасностях развития лавинных аварийных процессов. Поэтому далее рассмотрим типичные лавинные аварийные процессы, имеющие место в ЭЭС.
2. ИЗМЕРИТЕЛЬНЫЙ ОРГАН ИЗМЕРЕНИЯ ЧАСТОТЫРЕГУЛЯТОРА ВОЗБУЖДЕНИЯ СИНХРОНОГО ГЕНЕРАТОРА СИЛЬНОГО ДЕЙСТВИЯ.
Согласно Правилам технической эксплуатации все генераторы независимо от их мощности и напряжения должны иметь устройство форсировки возбуждения, а генераторы мощностью 3 МВт и выше должны быть также оснащены автоматическими регуляторами возбуждения (АРВ).
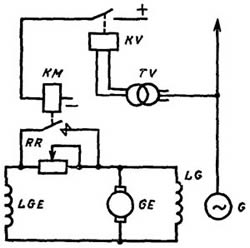
Рис.1. Схема релейной форсировки возбуждения генератора
Простейшим автоматическим устройством, предназначенным для быстрого увеличения возбуждения генератора в аварийном режиме, является релейная форсировка возбуждения (реле KV и контактор КМ на рис.1). Принцип действия форсировки состоит в том, что при значительном снижении напряжения на зажимах генератора (обычно ниже 85% номинального) реле минимального напряжения К V замыкает свои контакты и приводит в действие контактор форсировки КМ, который, срабатывая, закорачивает сопротивление шунтового реостата в цепи возбудителя RR. В результате ток возбуждения возбудителя быстро возрастает до максимального значения и возбуждение генератора достигает предельного значения.

Рис.2. Схема APB генератора пропорционального действия
Широко распространенными APB являются устройства компаундирования в сочетании с корректором напряжения (рис.2).
Термин «компаундирование» обозначает автоматическое регулирование тока возбуждения машины в зависимости от тока статора. В нормальном режиме в случае увеличения тока статора (при активно-индуктивной нагрузке) напряжение генератора уменьшается, но устройство компаундирования автоматически увеличивает ток возбуждения возбудителя, а следовательно, и ток ротора генератора, благодаря чему напряжение на зажимах статора генератора восстанавливается.
Устройство компаундирования успешно работает и в аварийных режимах работы генератора, когда напряжение генератора снижается, а ток в обмотке статора значительно возрастает.
В схему компаундирования входят трансформаторы тока ТА, вторичные обмотки которых включены на промежуточный трансформатор Т, а также выпрямитель VD1, который выпрямляет ток компаундирования перед подачей его в обмотку возбуждения возбудителя LGE. Ток компаундирования IK без учета коррекции пропорционален IГ.
Компаундирование в чистом виде не может обеспечить достаточно точное поддержание напряжения генератора. Поэтому одновременно с регулированием возбуждения по току статора генератора применяется еще регулирование по напряжению статора. Для введения регулирующего импульса по напряжению трансформатор Т (универсальный трансформатор с подмагничиванием) оснащается еще обмотками 2 и 4 (рис.2,а).
Ток в обмотке 2 пропорционален UГ. Фаза тока IН подобрана так, что ток IН совпадает по фазе с реактивной слагающей тока генератора. Поэтому при чисто активной нагрузке МДС обмоток 1 и 2 взаимно сдвинуты на 90°, а при чисто реактивной нагрузке генератора они совпадают по фазе.
Вследствие этого ток компаундирования при неизменных величинах IГ и UГ получается тем больше, чем ниже cosφ или выше реактивная нагрузка генератора, - это так называемое фазовое компаундирование, которое обеспечивает более точное поддержание напряжения, так как ток компаундирования зависит не только от абсолютного значения тока генератора, но и от cosφ.
Через обмотку 4 подмагничивания Т производится окончательная коррекция тока компаундирования относительно заданного значения UГ при помощи корректора напряжения.
В общем случае в состав корректора напряжения входят измерительные элементы И1 и И2, включаемые в цепь трансформатора напряжения TV через установочный автотрансформатор Т1.
Принцип действия измерительного органа корректора поясняется рис.2,б. Выпрямленный ток I1 на выходе измерительного элемента И1 прямо пропорционален входному напряжению. Поэтому этот элемент называется линейным.
Выпрямленный ток I2 на выходе элемента И2, который называется нелинейным, имеет нелинейную зависимость от входного напряжения (рис.2,б). Оба тока I1 и I2 поступают в усилитель У, который реагирует на их разность и усиливает ее. Ток выхода корректора поступает в данном случае в обмотку 4 подмагничивания Т.
Из рис.2,б видно, что при снижении напряжения на входе измерительных элементов менее U1 под действием разности токов (I1-I2) ток выхода корректора увеличивается. Корректор поддерживает то напряжение генератора, которое соответствует напряжению U1 на входе измерительных элементов. С помощью автотрансформатора T1можно изменять настройку корректора.
Рассмотренная схема АРВ относится к группе регуляторов пропорционального действия, реагирующих на отклонение тока статора и напряжения статора генератора.
Разработаны и находятся в эксплуатации регуляторы сильного действия, реагирующие на скорости изменения параметров регулирования, а также на их ускорение. Устройство АРВ сильного действия в сочетании с быстродействующими системами возбуждения, имеющими высокие скорости изменения напряжения возбуждения и большие значения потолочного напряжения возбудителя, обеспечивает значительное повышение устойчивости параллельной работы генератора. С целью повышения эффективности в закон регулирования вводятся также составляющие Δf и f'.

Рис.3. Структурная схема АРВ сильного действия
Структурная схема АРВ сильного действия приведена на рис.3. Автоматическое регулирование возбуждения состоит из двух основных звеньев: измерительного звена и усилителя-сумматора.
В измерительное звено входят блоки измерения напряжения (БИН) и частоты (БИЧ). Блок БИН содержит предвключенный элемент БКТ, в котором происходит автоматическая коррекция измеряемого напряжения в зависимости от реактивной составляющей тока генератора. После БКТ сигнал поступает на измерительные элементы ΔU (отклонение напряжения) и U' (производная напряжения), выход которых пропорционален указанным величинам. Блок БИЧ имеет измерительные элементы, выход которых пропорционален Δf и f'.
Усилитель-сумматор представляет собой двухкаскадный магнитный усилитель, выходной сигнал которого направляется на управление рабочей и форсировочной группами тиристоров быстродействующей системы возбуждения (исполнительный элемент).
Для улучшения характеристик АРВ (повышения быстродействия и др.) в схему регулятора обычно вводят обратные связи ОС. Автоматические регуляторы возбуждения сильного действия (АРВ СД) применяются для повышения устойчивости параллельной работы турбо- и гидрогенераторов электростанций, связанных с энергосистемой протяженными и сильно загруженными линиями электропередачи. Повышение устойчивости достигается тем, что АРВ СД оказывают на системы возбуждения генераторов более интенсивное воздействие, чем АРВ пропорционального действия.
Одновременно для стабилизации процесса регулирования в АРВ-СД используются дополнительные устройства, реагирующие не только на отклонение регулируемых параметров, но также на скорость и ускорение их отклонения. Учет этих дополнительных факторов делает АРВ способным с опережением выявлять тенденцию протекания процесса и оказывать сильное воздействие на системы возбуждения генераторов в самом начале изменения режима.
Скорость изменения электрических параметров характеризуется первой производной, а ускорение — второй производной данного параметра по времени. Поэтому выявление этих факторов приозводится специальными дифференцирующими устройствами.
Применяются АРВ СД с быстродействующими безынерционными системами возбуждения с управляемыми выпрямителями (тиристорами). На рис. 7.21 приведена упрощенная структурная схема АРВ СД, который обеспечивает:
автоматическое регулирование возбуждения генератора по заданному закону для поддержания постоянства напряжения на шинах электростанции или в заданной точке сети;
форсировку возбуждения и развозбуждение генератора;

Рис. 7.21. Структурная схема автоматического регулятора возбуждения сильного действия (АРВ СД)
ограничение минимального тока ротора;
ограничение тока ротора двукратным значением при форсировке и длительной перегрузке обмотки ротора генератора.
Напряжение статора генератора  подводится от трансформатора напряжения TV к блоку напряжения БН через блок компаундирования БКТ, который предназначен для создания статизма, необходимого для устойчивого распределения реактивной мощности между параллельно работающими генераторами. К блоку БКТ подводится также ток статора генератора от трансформаторов тока ТА.
подводится от трансформатора напряжения TV к блоку напряжения БН через блок компаундирования БКТ, который предназначен для создания статизма, необходимого для устойчивого распределения реактивной мощности между параллельно работающими генераторами. К блоку БКТ подводится также ток статора генератора от трансформаторов тока ТА.
Блок БН включает в себя измерительный элемент, который выявляет отклонение напряжения от заданной уставки  элемент релейной форсировки возбуждения РФ и дифференцирующее устройство
элемент релейной форсировки возбуждения РФ и дифференцирующее устройство  которое выявляет скорость отклонения напряжения UT. Сигналы
которое выявляет скорость отклонения напряжения UT. Сигналы  форсировки возбуждения ФВ и
форсировки возбуждения ФВ и  подаются на суммирующий магнитный усилитель
подаются на суммирующий магнитный усилитель 
Уставка напряжения, которое должен поддерживать регулятор, задается с помощью потенциал-регулятора УПР, имеющего ручное и дистанционное управление.
Напряжение от TV генератора подводится также к блоку частоты и защиты  . Имеющийся в
. Имеющийся в  измерительный элемент выявляет отклонение частоты от нормального значения и формирует сигнал
измерительный элемент выявляет отклонение частоты от нормального значения и формирует сигнал  . Одновременно дифференцирующее устройство
. Одновременно дифференцирующее устройство  выявляет скорость изменения частоты f. Оба эти параметра поступают в суммирующий усилитель
выявляет скорость изменения частоты f. Оба эти параметра поступают в суммирующий усилитель  .
.
Для предотвращения ложных воздействий на систему возбуждения генератора по каналам производных при внезапных сбросах нагрузки, отключения КЗ и в других случаях, когда возможны резкие изменения напряжения или частоты, предусмотрены защитные блокировки.
Для ограничения тока ротора генератора при форсировке возбуждения двукратным значением к номинальному току и для предотвращения длительной перегрузки обмотки ротора АРВ СД содержит специальный блок ограничения БОР.
При форсировке возбуждения и увеличении тока ротора генератора до  блок БОР воздействует непосредственно на систему управления форсировочной группы тиристоров СУТ Ф, не допуская увеличения тока ротора выше двукратного значения. Ток ротора подводится к блоку БОР от трансформатора постоянного тока ТАС. Ограничитель перегрузки ОП блока БОР срабатывает с выдержкой времени, зависящей от кратности перегрузки к номинальному току ротора, и воздействует на снижение тока ротора через суммирующий усилитель
блок БОР воздействует непосредственно на систему управления форсировочной группы тиристоров СУТ Ф, не допуская увеличения тока ротора выше двукратного значения. Ток ротора подводится к блоку БОР от трансформатора постоянного тока ТАС. Ограничитель перегрузки ОП блока БОР срабатывает с выдержкой времени, зависящей от кратности перегрузки к номинальному току ротора, и воздействует на снижение тока ротора через суммирующий усилитель  и путем изменения уставки АРВ СД потенциал-регулятором УПР.
и путем изменения уставки АРВ СД потенциал-регулятором УПР.
Устойчивая работа генератора в режиме недовозбуждения обеспечивается ограничителем минимального возбуждения ОМВ. При срабатывании ОМВ воздействует на суммирующий усилитель и на повышение уставки АРВ-СД потенциал-регулятором УПР.
Канал регулирования по скорости изменения тока ротора генератора  образуется дифференцирующим устройством
образуется дифференцирующим устройством  к которому подводится ток ротора генератора от трансформатора тока постоянного тока ТАС. Сигнал
к которому подводится ток ротора генератора от трансформатора тока постоянного тока ТАС. Сигнал  подается на суммирующий усилитель
подается на суммирующий усилитель 
Выбор каналов регулирования коэффициентов усиления по каждому из них является сложной задачей, решение которой в существенной степени зависит от параметров и характеристик энергосистемы, в которой работает синхронный генератор, и требует рассмотрения установившихся режимов и переходных процессов энергосистемы в целом. При этом производится определение:
значений параметров канала регулирования по отклонению напряжения  обеспечивающих заданную точность поддержания напряжения в различных режимах работы синхронного генератора;
обеспечивающих заданную точность поддержания напряжения в различных режимах работы синхронного генератора;
типа и параметров каналов стабилизации  обеспечивающих статическую устойчивость и заданные показатели качества переходных процессов при малых отклонениях от исходного установившегося режима;
обеспечивающих статическую устойчивость и заданные показатели качества переходных процессов при малых отклонениях от исходного установившегося режима;
параметров устройства форсировки, улучшающих динамическую устойчивость.
Для стабилизации процесса регулирования, возбуждения генератора в АРВ СД применена обратная связь по скорости изменения напряжения ротора генератора. Напряжение ротора генератора через делитель напряжения ДБОС подводится к блоку обратной связи БОС, который по своим выходным цепям воздействует на суммирующий усилитель  . Суммирующий магнитный усилитель
. Суммирующий магнитный усилитель  производит суммирование и усиление всех сигналов, поступающих на его вход. Суммарный сигнал с его выхода поступает на операционные усилители
производит суммирование и усиление всех сигналов, поступающих на его вход. Суммарный сигнал с его выхода поступает на операционные усилители  , которые воздействуют на системы управления рабочей и форсировочной групп тиристорных выпрямителей возбуждения генератора СУТ Р и СУТ Ф.
, которые воздействуют на системы управления рабочей и форсировочной групп тиристорных выпрямителей возбуждения генератора СУТ Р и СУТ Ф.
Питание магнитных усилителей  , а также блока БЧЗ осуществляется от магнитного преобразователя частоты ПЧМ, на вход которого подается напряжение от трансформатора собственных нужд
, а также блока БЧЗ осуществляется от магнитного преобразователя частоты ПЧМ, на вход которого подается напряжение от трансформатора собственных нужд  а с выхода снимается напряжение 110 В, 450 Гц.
а с выхода снимается напряжение 110 В, 450 Гц.
Микропроцессорный автоматический регулятор возбуждения сильного действия. В ВЭИ им. В.И. Ленина разработан микропроцессорный регулятор возбуждения сильного действия АРВ С ДМ для турбо- и гидрогенераторов электростанций. Создание АРВ С ДМ (пришедшего на смену регуляторам аппаратного типа АРВ СД и АРВ СДП) было вызвано необходимостью дальнейшего совершенствования регуляторов по пути усложнения алгоритмов управления, увеличения объема выполняемых функций, повышения точности регулирования, создания адаптивных систем управления, перестраивающихся при изменении условий работы генератора в энергосистеме.
Основными функциями АРВ С ДМ являются те же, что и рассмотренного выше АРВ СД: поддержание с заданным статизмом напряжения на шинах;
обеспечение максимальных пределов статической и динамической устойчивости электропередачи; улучшение демпфирования послеаварийных качаний за счет применения закона сильного регулирования, предусматривающего формирование управляющего воздействия по отклонению и производным регулируемых параметров; ограничение режимных параметров генератора (токов ротора и статора с высокой точностью и быстродействием; подгонка уставки АРВ по напряжению при включении машины в сеть методом точной синхронизации и самосинхронизации; разгрузка синхронной машины по реактивной мощности перед ее отключением от сети и т.д.); индикация состояния системы регулирования возбуждения и настроечных параметров регулятора, сигнализация неисправностей, диагностика отказов, сокращающие время наладки и настройки АРВ как на заводе-изготовителе, так и на электростанции.
Наряду с лучшими характеристиками и функциональными возможностями регулятора применение микроЭВМ позволяет резко снизить объем специализированной аппаратуры и упростить ее за счет использования серийных устройств. Расширение объема выполняемых функций, модификацию алгоритмов применительно к конкретным условиям эксплуатации практически осуществляют без переработки аппаратуры, только путем изменения программ. Повышается надежность вследствие снижения числа компонентов и их соединений, применения резервирования. Сокращается время восстановления благодаря использованию методов самодиагностики.
Комплекс технических средств АРВ СДМ (рис. 7.22) содержит: управляющий вычислительный комплекс повышенной надежности УВК, устройства связи с объектом УСО, систему питания СП, пульт контроля и управления ПКУ. В состав УВК входят: две микроЭВМ типа В-7 с ОЗУ 32 кбайт, ППЗУ 32 кбайт, модулями ввода-вывода параллельного и последовательного интерфейса, аналого-цифровыми и цифро-аналоговыми преобразователями (АЦП и ЦАП), схемами прерывания, аппаратурой, обеспечивающей коммутацию выходных сигналов микроЭВМ. Одна микроЭВМ является рабочей, вторая находится в горячем резерве. Регулятор имеет развитую систему программно-аппаратного контроля микроЭВМ, УСО и СП. Информация о неисправности микроЭВМ и их блоков питания сосредоточивается в блоках контроля БК. Последние формируют результирующие сигналы неисправности, поступающие на входы блока коммутации выходных логических и аналоговых сигналов микроЭВМ БКМ. На другие входы БКМ подаются сигналы о неисправности УСО. В зависимости от характера неисправности производится либо перевод управления на резервную микроЭВМ, либо отключение АРВ.
В состав входного  входят блоки ввода и обработки аналоговых сигналов от трансформаторов напряжения и тока, а также дискретных логических сигналов. Блоки имеют гальваническую развязку: аналоговые с помощью трансформаторов, дискретные — с помощью герконовых реле.
входят блоки ввода и обработки аналоговых сигналов от трансформаторов напряжения и тока, а также дискретных логических сигналов. Блоки имеют гальваническую развязку: аналоговые с помощью трансформаторов, дискретные — с помощью герконовых реле.

Рис. 7.22. Структурная схема технических средств микропроцессорного АРВ сильного действия
Токовые сигналы преобразуются в потенциальные с помощью шунтов. Подавление помех во входных блоках осуществляется с помощью фильтров. Выходное  содержит блоки выходных дискретных сигналов на базе герконовых реле и блоки вывода управляющих аналоговых воздействий, обеспечивающие гальваническую развязку и усиление выходных сигналов регулятора.
содержит блоки выходных дискретных сигналов на базе герконовых реле и блоки вывода управляющих аналоговых воздействий, обеспечивающие гальваническую развязку и усиление выходных сигналов регулятора.
Система питания обеспечивает гарантированное электропитание УВК, УСО и других блоков: нормально — от сети собственных нужд 380 В переменного тока, при нарушении основного питания — от оперативного постоянного тока 220 В через инвертор.
Пульт контроля и управления позволяет задавать режим и контролировать работу регулятора, корректировать его уставки.
Для регулятора возбуждения принят закон регулирования, аналогичный применяемому в регуляторах АРВ СД и АРВ СДП. Регулирование возбуждения производится по отклонению и производной напряжения, изменению и производной частоты, по производной тока ротора.
Диапазоны изменения коэффициентов регулирования расширены по сравнению с предшествующими регуляторами и установлены следующими: по отклонению напряжения —  по производной напряжения —
по производной напряжения —  по изменению частоты —
по изменению частоты —  ; по производной частоты -
; по производной частоты -  ; по производной тока ротора —
; по производной тока ротора —  тока. За относительные единицы приняты соответствующие номинальные значения.
тока. За относительные единицы приняты соответствующие номинальные значения.
Компенсация сопротивления повышающего трансформатора и стабилизация распределения реактивных нагрузок синхронных машин, объединенных на уровне генераторного напряжения, выполняются программно. Производные режимных параметров рассчитываются по специальному алгоритму, осуществляющему дифференцирование со сглаживанием.
Комплекс программного обеспечения является системой реального времени и включает: программу начального пуска, программу «Диспетчер», программы измерения режимных параметров, обработки сбоев, контроля исправности регулятора, связи с оператором через ПКУ и функциональные программы регулятора. Кроме того, имеются комплекс программ для наладки регулятора и выполняемый на отдельной ЭВМ комплекс записи и контроля исходных данных в ППЗУ ЭВМ. Регулятор выпускается заводом «Электропульт» в виде шкафа, оснащенного принудительной системой вентиляции и специальной подвеской микроЭВМ для снижения влияния вибрации.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Правила технической эксплуатации электрических станций и сетей. – М.: Энергия, 2002. – 288 с.
2. Баркан Я.О. Эксплуатация энергосистем. – М.: Высшая школа, 1990. – 304 с.
3. Короткевич М.А. Основы эксплуатации электрических сетей. – Минск: Вышэйшая школа, 1999. – 268 с.
4. Маркович И.М. Режимы энергетических систем. – М.: Энергия, 1969. – 352 с.
5. Межотраслевые правила безопасности при эксплуатации электроустановок. – М.: Энергия, 2001. – 165 с.
6. Правила предотвращения развития и ликвидации нарушений нормального режима электрической части энергосистем. Стандарт организации. – ОАО РАО «ЕЭС России», 2005. – 51 с.