ЗАДАНИЕ
1. Полагая W Р(р) = 1 и W ОС(р) = 0, привести в общем виде:
W РАЗ(р) – передаточную функцию объекта управления по управляющему воздействию x; Wf (p) – передаточную функцию объекта управления по возмущающему воздействию f.
Всепреобразования структурной схемы объекта привести в пояснительной записке.
2. При известных типах и параметрах W 1(p).. W 4(p) определить характер устойчивости объекта по управляющему воздействию с помощью любого алгебраического критерия.
3. При W ОС(р) = 1 выполнить синтез регулятора W Р(р) для обеспечения астатизма системы первого порядка и запаса устойчивости системы управления, не менее φ з = 30º.
4. Проверить устойчивость полученной системы управления (с учётом регулятора) любым графическим критерием. Показать на графиках запас устойчивости по амплитуде К З и фазе φ з.
5. Определить W e(р) – передаточную функцию объекта управления и регулятора по ошибке регулирования в общем виде. Всенеобходимыепреобразования структурной схемы объекта привести в пояснительной записке.
6. При известных типах и параметрах W 1(p).. W 4(p) определить коэффициент ошибки системы по ускорению.
Рисунок 1 – Структурная схема системы автоматического управления
Таблица 1 – Параметры звеньев системы автоматического управления
| W 1(p) | W 2(p) | W 3(p) | W 4(p) |

| 
| 
| K 4 |
| K 1 = 2 τ 2 = 0,0008 | K 2 = 160
 = 0,00025 = 0,00025
| K 3 = 0,075 | K 4 = 0,1 |
1. ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНОЙ ФУНКЦИИ ОБЪЕКТА ПО УПРАВЛЯЮЩЕМУ ВОЗДЕЙСТВИЮ W РАЗ(p)
На рисунке 2 показана исходная структурная схема исследуемой системы управления. Согласно принципу суперпозиции, определение передаточной функции системы по управляющему воздействию x осуществляется при отсутствии возмущающего воздействия f [1]. На основании данного принципа с учётом условий задания W Р(р) = 1 и W ОС(р) = 0 исходная структурная схема рисунка 2 преобразуется в структурную схему, показанную на рисунке 3.
Рисунок 2 – Исходная структурная схема системы автоматического управления
Рисунок 3 – Структурная схема системы автоматического управления с учётом условий задания и принципа суперпозиции
На рисунке 3 узлы, обозначенные цифрами 1 и 2 могут быть представлены как две параллельные линии связи: первая – с выхода звена W 1(p) на вход сумматора обратной связи этого же звена, вторая - с выхода звена W 1(p) на вход звена W 4(p). Таким образом структурная схема рисунка 3 может быть преобразована к виду, показанному на рисунке 4. Кроме этого, на рисунке 4 обозначены участки элементарных способов соединения звеньев САУ: звено W 1(p), охваченное единичной положительной обратной связью (I, рисунок 4); параллельное включение звеньев W 2(p) и W 4(p) (II, рисунок 4).
По входу х:
по возмущающему воздействию:
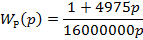
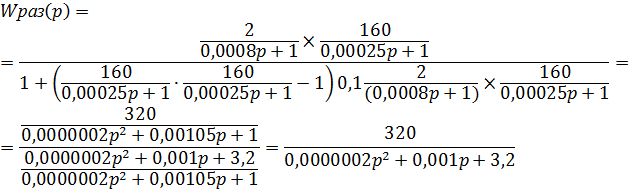
Таким образом, разомкнутая передаточная функция объекта управления W РАЗ(p) имеет вид:

Выполним необходимые подстановки в данное выражение с учётом данных таблицы.

2. ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНОЙ ФУНКЦИИ ОБЪЕКТА ПО УПРАВЛЯЮЩЕМУ ВОЗДЕЙСТВИЮ Wf (p)
Согласно принципу суперпозиции, с учётом условий задания, передаточная функция объекта управления по возмущающему воздействию f вырождается в выражение:

Выполнив подстановку данных из таблицы в выражение  получим:
получим:

ОПРЕДЕЛЕНИЕ УСТОЙЧИВОСТИ ОБЪЕКТА УПРАВЛЕНИЯ ПРИ ПОМОЩИ АЛГЕБРАИЧЕСКОГО КРИТЕРИЯ
Для определения степени устойчивости объекта управления воспользуемся критерием Гурвица. С этой целью определим передаточную функцию замкнутой системы, т.е. при

Известно, что передаточная функция замкнутой системы может быть определена как:


Из данного выражения следует, что характеристическое уравнение объекта управления D (p) представляет собой полином:

Тогда коэффициенты характеристического уравнения D (p) равны: a 0 =  ; a 1 = 0,001; a 2 = 3,2. Составим матрицу Гурвица G и найдём все её диагональные определители Δ ii:
; a 1 = 0,001; a 2 = 3,2. Составим матрицу Гурвица G и найдём все её диагональные определители Δ ii:



Так как все главные определители матрицы Гурвица положительны, можно сделать вывод об устойчивости объекта управления.
4. СИНТЕЗ РЕГУЛЯТОРА W P(p)
Согласно заданию, синтез регулятора W P(p) необходимо выполнять из условия получения в системе управления астатизма первого порядка с запасом устойчивости не менее 30º. Из анализа выражения (1) следует, что объект управления не обладает астатизмом (в характеристическом уравнении не имеется свободного оператора p), таким образом, для выполнения задания достаточно, чтобы регулятор представлял собой ПИ звено с передаточной характеристикой:
где К P и  определяются по выражениям:
определяются по выражениям:

.

В выражении  К 0 – коэффициент усиления разомкнутой системы вида
К 0 – коэффициент усиления разомкнутой системы вида

Приведём наше выражение  к подобному виду:
к подобному виду:

Тогда К 0 = 320000, τ1 =  τ2 =
τ2 =  . – постоянные времени объекта управления. Подставив полученные значения в
. – постоянные времени объекта управления. Подставив полученные значения в  , будем иметь:
, будем иметь: