ОТЧЁТ
о лабораторной работе №3
Исследование динамических свойств линейных систем автоматического управления
| Выполнил: | Проверила: | |
| студент гр.011801 ФКП | Воробей А. М. | |
| Казачёнок М. В. |
Минск 2013
Цель работы
Исследование качественных показателей систем автоматического регулирования на ЭВМ.
Краткие теоретические сведения
Устойчивость работы САУ является необходимым, но недостаточным условием. Система кроме устойчивости еще должна обладать определенным качествами, определенными техническими условиями на разработку САУ. Нормы запасов устойчивости определяют показатели качества систем автоматического регулирования.
Следует иметь в виду, что показатели переходного процесса определяются среднечастотной частью характеристики: время регулирования обратно пропорционально частоте среза (быстродействие системы); перерегулирование, колебательность процесса тем меньше, чем больше запас устойчивости по фазе, чем протяженнее среднечастотная часть ЛАЧХ.
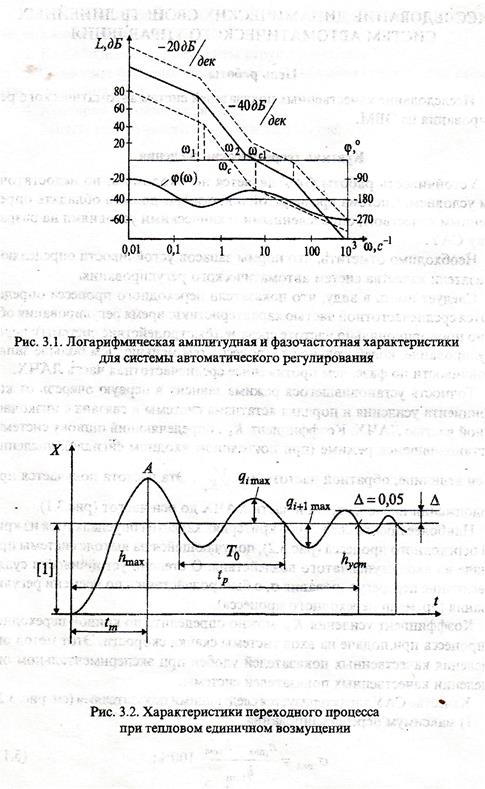
Точность установившегося режима зависит в первую очередь от коэффициента усиления и порядка астатизма системы и связана с низкочастотной частью ЛАЧХ. Коэффициент Kv, определяющий ошибку системы в установившемся режиме (при постоянном входном сигнале), численно равен величине, обратной частоте  . Эта частота получается при продолжении низкочастотной части ЛАЧХ до оси частот (рисунок 1).
. Эта частота получается при продолжении низкочастотной части ЛАЧХ до оси частот (рисунок 1).
Наиболее просто сведения о критериях качества определяются из кривой переходного процесса (рисунок 2), получающейся на выходе системы при подаче на вход ступенчатого воздействия. О степени устойчивости судят по величине перерегулирования s, о быстродействии – по времени регулирования (времени переходного процесса).
Коэффициент усиления Kv можно определить по кривой переходного процесса при подаче на вход системы скачка скорости. Этот метод определения качественных показателей удобен при экспериментальном определении качественных показателей системы.
Качество САУ характеризуется следующими показателями:
1) максимум перерегулирования:
 (1)
(1)
2) время регулирования tp:
3) число колебаний N, регулируемых в течение времени tp;
4) собственная частота колебаний системы  , где T0 – периодсобственных колебаний системы;
, где T0 – периодсобственных колебаний системы;
5) логарифмический декремент затухания;
 (2)
(2)
6)  – максимальная скорость отработки регулируемой величины.
– максимальная скорость отработки регулируемой величины.
Используя приближенные аппроксимирующие зависимости, можно по показателям переходного процесса smax, tp, T0 оценить частоту среза и запас устойчивости или, наоборот, определить smax, tp, T0, имея wc и Df(wс):
 (3)
(3)
 (4)
(4)
 (5)
(5)
Рассмотрим связи между переходными процессами и амплитудными логарифмическими характеристиками для простейших систем первого и второго порядков. Обе системы в разомкнутом состоянии содержат одно интегрирующее звено. Для системы первого порядка частота среза wс равна коэффициенту усиления К, где  – постоянная времени экспоненты переходной функции замкнутой системы.
– постоянная времени экспоненты переходной функции замкнутой системы.
В системе первого порядка время регулирования можно выразить через wс следующим образом:
 (6)
(6)
Система второго порядка в замкнутом состоянии представляет собой колебательное звено, или последовательно соединенные два апериодических звена. Передаточная функция замкнутой системы может быть представлена:
 (7)
(7)
где  .
.
Для системы второго порядка при  затухание колебаний x в замкнутой системе будет всегда меньше 0,5, при
затухание колебаний x в замкнутой системе будет всегда меньше 0,5, при  затухание x = 0,5 и при
затухание x = 0,5 и при  затухание x больше 0,5. При оптимальном коэффициенте затухания
затухание x больше 0,5. При оптимальном коэффициенте затухания  отношение частот
отношение частот  равно 2.
равно 2.
Чем больше отношение , тем выше коэффициент затухания, тем ближе переходная функция к экспоненте с постоянной времени  . При отношении
. При отношении  время регулирования в системе второго порядка довольно точно соответствует формуле, а перерегулирование практически отсутствует. Можно сделать вывод: для того, чтобы переходный процесс не был колебательным, частота среза должна находиться на участке ЛАХ с наклоном 20 дБ/дек. Это справедливо и для более сложных систем.
время регулирования в системе второго порядка довольно точно соответствует формуле, а перерегулирование практически отсутствует. Можно сделать вывод: для того, чтобы переходный процесс не был колебательным, частота среза должна находиться на участке ЛАХ с наклоном 20 дБ/дек. Это справедливо и для более сложных систем.
Частотные методы исследования систем управления широко используют в инженерной практике. Применение этих методов позволяет определить такие важные показатели качества, как быстродействие, перерегулирование, колебательность процесса. При воздействии на систему единичной ступенчатой функции  выходная величина, являющаяся переходной характеристикой системы
выходная величина, являющаяся переходной характеристикой системы  определяется через вещественную частотную или мнимую частотную характеристику замкнутой системы:
определяется через вещественную частотную или мнимую частотную характеристику замкнутой системы:
 (8)
(8)
где P(w) – вещественная частотная характеристика замкнутой САУ.
Вещественная частотная характеристика должна определяться для замкнутых систем с жесткой обратной связью.
Разница в переходных процессах тем меньше, чем при больших частотах наблюдается различие в частотных характеристиках.
Изучение системы необязательно проводить во всем диапазоне частот от 0 до  . Достаточно ограничиться областью так называемых существенных частот (иначе называемых областью пропускания частот), соответствующих достаточно большим значениям ординат P(w). Обычно считается, что если при некотором w соблюдается неравенство, то начиная с этой частоты вид частотной характеристики можно не учитывать.
. Достаточно ограничиться областью так называемых существенных частот (иначе называемых областью пропускания частот), соответствующих достаточно большим значениям ординат P(w). Обычно считается, что если при некотором w соблюдается неравенство, то начиная с этой частоты вид частотной характеристики можно не учитывать.
Значение переходной функции h(0) в начальный момент времени равно конечному значению вещественной частотной характеристики. Установившееся конечное значение переходной функции h() равно начальному значению Р(0) частотной характеристики.
Чтобы величина перерегулирования в статической системе не превышала 18% от статического отклонения, достаточно, чтобы P(w) была положительной невозрастающей функцией.
 (9)
(9)
Чтобы переходный процесс протекал монотонно, достаточно, чтобы производная  представляла собой отрицательно убывающую по абсолютной величине непрерывную функцию от w. Признаком немонотонности процесса и наличия перерегулирования является условие
представляла собой отрицательно убывающую по абсолютной величине непрерывную функцию от w. Признаком немонотонности процесса и наличия перерегулирования является условие  . Если P(w) имеет максимуми ее можно представить как разность двух невозрастающих положительных непрерывных функций, каждая из которых удовлетворяет условию монотонности, то величина перерегулирования оценивается как:
. Если P(w) имеет максимуми ее можно представить как разность двух невозрастающих положительных непрерывных функций, каждая из которых удовлетворяет условию монотонности, то величина перерегулирования оценивается как:
 (10)
(10)
Если вещественной частотной характеристике P(w) соответствует переходная функция, то вещественной частотной характеристике P(n·w) будет соответствовать переходная функция  .Если P(w) имеет высокий и острый пик при частоте wK, то переходный процесс содержит медленно затухающие колебания этой частоты.
.Если P(w) имеет высокий и острый пик при частоте wK, то переходный процесс содержит медленно затухающие колебания этой частоты.
Склонность системы к колебаниям тем больше, а затухание колебаний тем меньше, чем острее и выше пик, Основным инженерным методом построения переходной характеристики является метод трапеций. Построение переходного процесса осуществляется следующим образом:
а) по логарифмическим частотным характеристикам разомкнутой системы с жесткой обратной связью при использовании номограммы замыкания  строится вещественная частотная характеристика замкнутой системы с жесткой обратной связью;
строится вещественная частотная характеристика замкнутой системы с жесткой обратной связью;
б) Р(w) разбивается на трапеции;
в) для каждой трапеции определяется коэффициент наклона как отношение и по нему из таблицы функций определяют значение;
г) на общем графике строятся для каждой трапеции соответствующий переходный процесс с учетом знака начальной ординаты. При этом каждый табличный интервал времени уменьшается в  раз, а каждая табличная ордината увеличивается в Рi (0) раз;
раз, а каждая табличная ордината увеличивается в Рi (0) раз;
д) суммируются ординаты всех построенных кривых и строится результирующий переходный процесс h(t).
Интегральные оценки позволяют оценить быстроту затухания процесса и отклонение регулируемой величины, не определяя то и другое в отдельности. В основе метода лежит разработка условных интегральных показателей, характеризующих наиболее просто отклонение реального переходного процесса от идеализированного.
Практическая часть