ПК – 17 [2.1.1]
ВЫБОР
Метод определения технического состояния объекта диагностирования, позволяющий отнести с некоторой вероятностью текущее состояние объекта диагностики к одному из заранее установленных классов, – это …
– логический метод
– метод статистической классификации
– вероятностный метод
– детерминистский метод.
ПК – 17 [2.1.1]
ВЫБОР
Метод распознавания состояния, использующий сравнение полученного набора значений диагностических признаков с заранее установленными их наборами в различных состояниях, называется …
– методом трафаретов
– методом Байеса
– методом классификации
– методом последовательного анализа
ПК – 17 [2.1.1]
ВЫБОР
Метод определения условных вероятностей заданного набора состояний объекта, использующий вероятности состояний и вероятности появления признаков в этих состояниях – это …
– метод сравнения
– метод классификации
– метод последовательного анализа
– метод Байеса
ПК – 17 [2.1.1]
ВЫБОР
Вероятность P(A˄k) совмещения двух событий: нахождения объекта в состоянии A и наличия в этом состоянии признака k определится как: …
– P(A˄k) = P(A)·P(A/k)
– P(A˄k) = P(A)/P(A/k)
– P(A˄k) = P(A/k)/P(A)
– P(A˄k) = P(A)·P(k/A)
ПК – 17 [2.1.1]
ВЫБОР
Условная вероятность P(A/k) диагноза состояния A, устанавливаемая по наличию в этом состоянии одного признака k в соответствии с формулой Байеса, определится как: …
– P(A/k) = P(A)·P(k/A)/P(k)
– P(A/k) = P(A)·P(k/A)/P(A/k)
– P(A/k) = P(k)·P(k/A)/P(A)
– P(A/k) = P(A)·P(k/A)
ПК – 17 [2.1.1]
ВЫБОР
Условная вероятность P(k/A) появления признака k в состоянии объекта A в соответствии с формулой Байеса, определится как: …
– P(k/A) = P(A)·P(k/A)/P(A/k)
– P(k/A) = P(k)·P(A/k)/P(A)
– P(A/k) = P(k)·P(k/A)/P(A)
– P(A/k) = P(A)/P(k/A)
ПК – 17 [2.1.1]
ВЫБОР
Условная вероятность P(K/A) появления комплекса K независимых признаков в состоянии A объекта, если известны условные вероятности появления отдельных признаков k1, k2,…, kn, определится как: …
– P(K/A) = P(k1)·P(k2) ·…·P(kn)
– P(K/A) = P(k1/A)/P(k2/A) /…/P(kn/A)
– P(K/A) = P(k1/A)·P(k2/A) ·…·P(kn/A)
– P(K/A) = P(A/k1)·P(A/k2) ·…·P(A/kn)
ПК – 17 [2.1.1]
ВЫБОР
Условная вероятность P(A/K) диагноза состояния A, устанавливаемая по наличию в этом состоянии комплекса K признаков в соответствии с обобщенной формулой Байеса, определится как: …
– P(A/K) = P(A)·P(K/A)/P(A/K)
– P(A/K) = P(K)·P(KA)/P(A)
– P(A/K) = P(A)·P(K/A)
– P(A/K) = P(A)·P(K/A)/P(K)
ПК – 17 [2.1.2]
ВЫБОР
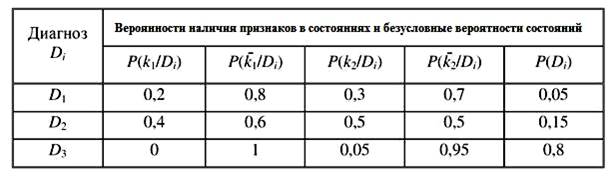
Таблица, в которой приводятся апостериорные условные вероятности наличия или отсутствия признаков в различных состояниях и безусловные вероятности этих состояний – это …
– диагностическая матрица
– таблица состояний и проверок
– таблица сравнения состояний
– таблица диагнозов
ПК – 17 [2.1.2]
ВЫБОР
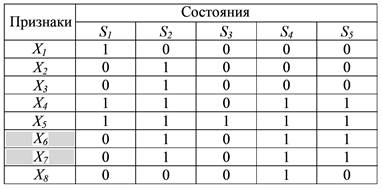
Таблица, пример которой показан на рисунке, – это …
– таблица состояний и проверок
– диагностическая матрица
– таблица сравнения состояний
– таблица диагнозов
ПК – 17 [2.1.3]
ВЫБОР
Выбор диагноза состояния объекта с комплексом признаков K по методу Байеса заключается …
– в сравнении вероятностей состояний
– в выборе минимального значения вероятности при появлении признаков
– в сравнении наибольшей вероятности с заданным вероятностным порогом – в выборе диагноза по наибольшей вероятности
ПК – 17 [2.1.3]
ВЫБОР
Условие K*Î Di, если P(Di/K*) больше или равно пороговой вероятности Pпор, означает, что …
– объект находится в состоянии Di
– состояние Di объекта отвергается
– распознавание диагноза невозможно
– объект находится в конкурирующем состоянии
ПК – 17 [2.1.3]
ВЫБОР
Условие K*Ï Di, если P(Di/K*) меньше пороговой вероятности Pпор, означает, что …
– объект находится в состоянии Di
– состояние Di объекта отвергается
– распознавание диагноза невозможно
– объект находится в исправном состоянии
ПК – 17 [2.2.1]
ВЫБОР
Принятие решений о продолжении эксплуатации объекта диагностирования или выводе его из эксплуатации принимается с использованием …
– метода Байеса
– теории принятия статистических решений
– метода последовательного анализа
– теории информации
ПК – 17 [2.2.1]
ВЫБОР
Выражения ( если k < k0, то k Î D1) или ( если k > k0, то k Î D2) при зарегистрированномзначении параметра k, пороговом значении k0 при двух диагнозах D1 и D2 означают …
– сравнение диагнозов
– сравнение параметров
– решающее правило
– выбор порогового значения
ПК – 17 [2.2.1]
ВЫБОР
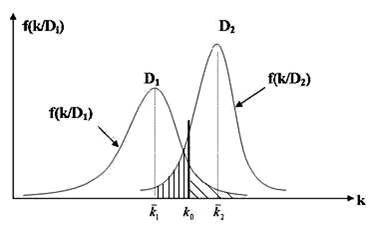
На рисунке для двух состояний D1 и D2 стрелками показаны зависимости …

– вероятности появления случайного параметра k в состояниях D1 и D2
– вероятности ошибок первого и второго рода
– кривые изменения параметра k в состояниях D1 и D2
– плотности вероятности появления параметра k в состояниях D1 и D2
ПК – 17 [2.2.1]
ВЫБОР
Метод определения оптимального порога k0 принятия решений, определяемый из условия минимума суммы вероятностей ошибочных решений – это …
– метод Пирсона
– метод Байеса
– метод минимального среднего риска
– метод минимакса
ПК – 17 [2.2.1]
ВЫБОР
На рисунке параметр k0 определяет …
– оптимальное пороговое значение параметра k
– среднее значение параметра k
– минимально допустимое значение случайного параметра k
– максимально допустимое значение случайного параметра k
ПК – 17 [2.2.1]
ВЫБОР
Площади заштрихованных областей на рисунке определяют …
– вероятности исправного состояния
– условные вероятности ошибок первого и второго рода
– условные вероятности неисправного состояния
– недопустимые области эксплуатации
ПК – 17 [2.2.1]
ВЫБОР
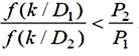
Соотношение в методе минимального среднего риска, показанное на рисунке, для двух состояний D1 или D2 объекта при полученном параметре k, известных стоимостях ошибок C12 и C21 и безусловных вероятностей состояний P1 и P2, соответствует принятию решения …

– (k Î D1)
– (k Î D2)
– (k Î D2 и D1)
– (k Î D2 или D1)
ПК – 17 [2.2.1]
ВЫБОР
Соотношение в методе минимального среднего риска, показанное на рисунке, для двух состояний D1 или D2 объекта при полученном параметре k, известных стоимостях ошибок C12 и C21 и безусловных вероятностей состояний P1 и P2, соответствует принятию решения …

– (k Î D1)
– (k Î D2)
– (k Î D2 и D1)
– (k Î D2 или D1)
ПК – 17 [2.2.2]
ВЫБОР
Метод определения оптимального порога k0 принятия решений, определяемый из условия равенства стоимостей ошибок первого и второго рода – это …
– метод Пирсона
– метод Байеса
– метод минимального числа ошибочных решений
– метод минимакса
ПК – 17 [2.2.2]
ВЫБОР
Соотношение в методе минимального числа ошибочных решений, показанное на рисунке, для двух состояний D1 или D2 объекта при полученном параметре k, равных стоимостях ошибок C12 = C21 и безусловных вероятностей состояний P1 и P2, соответствует принятию решения …

– (k Î D2)
– (k Î D2 и D1)
– (k Î D2 или D1)
– (k Î D1)
ПК – 17 [2.2.2]
ВЫБОР
Соотношение в методе минимального числа ошибочных решений, показанное на рисунке, для двух состояний D1 или D2 объекта при полученном параметре k, равных стоимостях ошибок C12 = C21 и безусловных вероятностей состояний P1 и P2, соответствует принятию решения …
– (k Î D2)
– (k Î D2 и D1)
– (k Î D2 или D1)
– (k Î D1)
ПК – 17 [2.2.3]
ВЫБОР
Метод определения оптимального порога k0 принятия решений, определяемый из условия следующего равенства (C12·P2 = C21·P1), – это …
– метод Пирсона
– метод максимального правдоподобия
– метод Байеса
– метод минимакса
ПК – 17 [2.2.3]
ВЫБОР
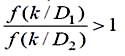
Соотношение в методе максимального правдоподобия, показанное на рисунке, для двух состояний D1 или D2 объекта при полученном параметре k, соответствует принятию решения …
– (k Î D2 или D1)
– (k Î D2 и D1)
– (k Î D1)
– (k Î D2)
ПК – 17 [2.2.3]
ВЫБОР
Соотношение в методе максимального правдоподобия, показанное на рисунке, для двух состояний D1 или D2 объекта при полученном параметре k, соответствует принятию решения …

– (k Î D1)
– (k Î D2 или D1)
– (k Î D2 и D1)
– (k Î D2)
ПК – 17 [2.2.3]
ВЫБОР
Метод определения оптимального порога принятия решений, в котором оптимальный порог k0 соответствует равенству f(k/D1) = f(k/D2), – это…
– метод минимакса
– метод Байеса
– метод Пирсона
– метод максимального правдоподобия
ПК – 17 [2.3.1]
ВЫБОР
Метод определения оптимального порога принятия решений, используемый в случае отсутствия сведений о безусловных априорных вероятностях диагнозов D1 и D2 и известных стоимостях ошибок C12 и C21, – это…
– метод минимакса
– метод минимума среднего риска
– метод Пирсона
– метод минимального числа ошибочных решений
ПК – 17 [2.3.1]
ВЫБОР
Метод определения оптимального порога k0 принятия решений с использованием среднего риска R, определяемый из условия (dR/dk0) = 0 и (dR/dP1) = 0 – это…
– метод Пирсона
– метод Байеса
– метод минимакса
+ метод минимального среднего риска
ПК – 17 [2.3.1]
ВЫБОР
Метод определения оптимального порога k0 принятия решений, соответствующего минимуму среднего риска R иопределяемый для максимально неблагоприятного значения вероятности P1 – это…
– метод Пирсона
– метод Байеса
– метод минимального среднего риска
– метод минимакса
ПК – 17 [2.3.2]
ВЫБОР
Метод принятия решений, в котором оптимальный порог k0 при известных стоимостях ошибок C12 и C21 соответствует отношению, представленному формулой на рисунке, – это…

– метод Пирсона
– метод минимакса
– метод минимального числа ошибочных решений
– метод минимума среднего риска
ПК – 17 [2.3.2]
ВЫБОР
Метод определения оптимального порога принятия решений, используемый в случае отсутствия сведений о безусловных априорных вероятностях диагнозов D1 и D2 и неизвестных стоимостях ошибок C12 и C21, – это…
– метод минимакса
– метод минимума среднего риска
– метод Пирсона
– метод минимального числа ошибочных решений
ПК – 17 [2.3.2]
ВЫБОР
Метод определения оптимального порога принятия решений k0, в котором минимизируется вероятность пропуска дефекта P12 и при заданном допустимом уровне вероятности ложной тревоги P21 = A, – это …
– метод минимакса
– метод минимального числа ошибочных решений
– метод минимума среднего риска
– метод Пирсона
ПК – 17 [2.3.2]
ВЫБОР
Метод определения оптимального порога принятия решений, в котором оптимальный порог k0 при заданной вероятности ложной тревоги P21 = A определяется из соотношения, представленного формулой на рисунке, – это…

– метод Пирсона
– метод минимального числа ошибочных решений
– метод минимакса
– метод минимума среднего риска
ПК – 17 [2.3.3]
ВЫБОР
Метод определения вероятностей состояний, в котором число диагностических признаков обследования заранее не устанавливается и их проводится столько, сколько необходимо для принятия решения с определенной степенью риска, – это …
– метод Пирсона
– метод последовательного анализа
– метод минимакса
– метод минимума среднего риска
ПК – 17 [2.3.3]
ВЫБОР
Правило принятия решений о диагнозе объекта по методу последовательного анализа по n обследуемым признакам, если при допустимой верхней границе A соблюдается соотношение, показанное на рисунке:

– (k Î D1)
– (k Î D2 или D1)
– (k Î D2)
– (k Ï D2)
ПК – 17 [2.4.1]
ВЫБОР
Общее число состояний объекта диагностики, состоящего из N сменных неремонтируемых блоков при двух возможных состояниях каждого блока, определятся по формуле:
– SN = 2N
– SN = N
– SN = 2N-1
– SN = N-1
ПК – 17 [2.4.1]
ВЫБОР
Число неисправных состояний объекта диагностики, состоящего из N сменных неремонтируемых блоков при двух возможных состояниях каждого блока, определятся по формуле:
– SN = 2N-1
– SN = 2N-1
– SN = N
– SN = N-1
ПК – 17 [2.4.1]
ВЫБОР
Число неисправных состояний объекта диагностики, состоящего из N сменных неремонтируемых блоков при двух возможных состояниях каждого блока и возможности отказа только по одному блоку, определятся по формуле:
– SN = 2N-1
– SN = N-1
– SN = N
– SN = 2N-1
ПК – 17 [2.4.1]
ВЫБОР
Число состояний объекта диагностики, состоящего из N сменных неремонтируемых блоков при двух возможных состояниях каждого блока и возможности отказа только одного из них, определятся по формуле:
– SN = 2N-1
– SN = N-1
– SN = N
– SN = N+1
ПК – 17 [2.4.1]
ВЫБОР
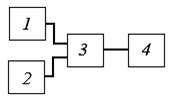
Вероятность неработоспособного состояния системы диагностирования, показанной на рисунке, с вероятностями отказов каждого блока равными соответственно q1, q2, q3, q4 при отказе блока 3 определяется по формуле:
– P = (1- q1)(1- q2)q3(1- q4)
– P = (1- q1)(1- q2)(1- q3)(1- q4)
– P = q1q2(1- q3)q4
– P = 1-q3
ПК – 17 [2.4.1]
ВЫБОР
Вероятность неработоспособного состояния системы диагностирования, показанной на рисунке, с вероятностями отказов каждого блока соответственно q1, q2, q3, q4 при одновременном отказе блоков 2 и 3 определяется по формуле:
– P = (1-q3)(1- q2)
– P = (1- q1)q2q3(1- q4)
– P = q1(1- q2)(1- q3)q4
– P = 1- q2q3
ПК – 30 [2.4.2]
ВЫБОР
Таблица для отбора минимально необходимого количества диагностических признаков – это …
– таблица функций неисправностей
– таблица состояний и проверок
– матрица состояний и признаков
– таблица результатов проверок
ПК – 30 [2.4.2]
ВЫБОР
Таблица, представленная на рисунке, – это …

– таблица состояний и проверок
– таблица результатов проверок
– таблица функций неисправностей
– матрица состояний и признаков
ПК – 30 [2.4.3]
ВЫБОР
Эффективность диагностического признака определяется …
– его информативностью
– скоростью проверки
– простотой регистрации
– таблицей результатов проверок
ПК – 30 [2.4.3]
ВЫБОР
Информативность диагностического признака определяется …
– вероятностью появления
– частотой появления
– количеством полученной информации
– матрицей состояний и признаков
ПК – 30 [2.4.3]
ВЫБОР
Количество информации, полученной после проверки диагностического признака, равно …
– условной энтропии системы после проверки
– информационной неопределенности системы
– вероятности появления признака
– разности энтропии системы до и после проверки
ПК – 30 [2.4.3]
ВЫБОР
Безусловная энтропия системы, которая может находиться в 8-ми равновероятных состояниях, равна …
ПК – 30 [2.4.3]
ВЫБОР
Информативность Zxi отдельного признака xi для различных состояний объекта, определяемая по количеству m -значимых результатов и n- незначимых результатов, определяется формулой:
– Zxi = m/n
– Zxi = m·n
– Zxi = log2(m+n)
– Zxi = log2(m/n)
ПК – 30 [2.5.1]
ВЫБОР
Если признак X5 имеет приведенную в таблице одинаковую реакцию на все состояния, то необходимо …

– оставить признак для использования
– изменить код реакции признака на состояния
– признак удалить из рассмотрения
– определить дополнительный признак
ПК – 30 [2.5.1]
ВЫБОР
Если признаки X6 и X7 имеют приведенную в таблице одинаковую реакцию на различные состояния, то необходимо …
– удалить строку с одним из признаков
– удалить строки с обоими признаками
– оставить строки неизменными
– изменить коды реакций в строке с одним из признаков
ПК – 30 [2.5.2]
ВЫБОР
Информационный метод позволяет установить …
– общее число контролируемых параметров
– тип контролируемых параметров
– порядок контроля параметров
– необходимое число контролируемых параметров
ПК – 30 [2.5.3]
ВЫБОР
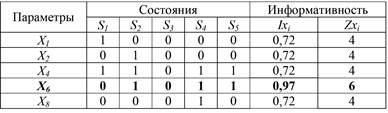
Таблица, представленная на рисунке, представляет собой …
– матрицу информативности результатов проверок
– информационную таблицу сравнения состояний
– матрицу информативности признаков
– матрицу информативности состояний
ПК – 30 [2.5.3]
ВЫБОР
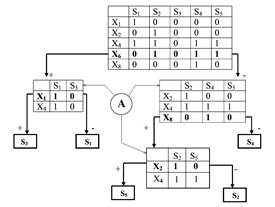
Таблицы, представленные на рисунке и обозначенные буквой «А», представляют собой …
– матрицы измерения параметров
– матрицы изменения состояний
– матрицы изменения контролируемых параметров
– подматрицы информативности параметров
ПК – 30 [2.5.4]
ВЫБОР
Схема на рисунке – это …

– схема выявления состояний
– алгоритм поиска места отказа
– схема изменения состояний
– схема изменения контролируемых параметров
ПК – 30 [2.5.4]
ВЫБОР
На схеме, показанной на рисунке, знак «+» означает …

– добавление следующего параметра
– путь диагностирования
– путь изменения состояний
– параметр в норме
ПК – 30 [2.5.4]
ВЫБОР
Таблица, представленная на рисунке, представляет собой …

– матрицу неисправностей
– итоговую матрицу кодов
– матрицу параметров
– матрицу состояний
ПК – 30 [2.5.4]
ВЫБОР
Схема, показанная на рисунке, – это …

– алгоритм поиска места отказа
– порядок измерения параметров
– схема состояний
– схема отказов системы