* символы, выделенные жирно - векторы
Если кинематика описывает законы движения, не интересуясь, почему движение происходит и почему именно так, а не иначе, то динамика изучает причины движения.
1. I закон Ньютона. Основная идея первого закона Ньютона принадлежит Галилею. Он первым поставил под сомнение принципы механики Аристотеля, который утверждал, что движется только то, что движимо. Галилей понял, что если исключить влияние на тело других тел, и прежде всего, трение, то тело будет двигаться прямолинейно и равномерно бесконечно долго и для этого не нужно его подталкивать. Такое движение он назвал движением по инерции.
1.1. Закон инерции Галилея: «Тело, на которое не действуют другие тела или действие этих тел взаимно уравновешено, называемое свободным телом, сохраняет состояние покоя или прямолинейного равномерного движения».
1.2. Ньютон добавил к этому, что такое движение по инерции происходит только относительно инерциальных систем отсчета. Существует также бесконечно много систем отсчета, называемых неинерциальными, в которых на тело не действуют другие тела, но оно движется ускоренно, правда это ускорение не зависит от величины тела и подчиняется простым законам, что позволяет свести движение в неинерциальных системах отсчета к инерциальным. Смысл первого закона Ньютона в том, что он постулировал, что «Существуют инерциальные системы отсчета, в которых тело движется в соответствии с законом инерции».
1.3. Если существует хотя бы одна инерциальная система отсчета, то их существует бесконечно много. Любая система, которая движется относительно инерциальной с постоянной скоростью (или покоится), является также инерциальной. В самом деле, если тело в первой системе движется с постоянной скоростью, то по закону о независимости перемещений и скоростей, оно будет и в другой системе двигаться с постоянной скоростью.
1.4. Если какая-либо система отсчета движется относительно инерциальной системы с ускорением: тангенциальным или нормальным, то эта система является неинерциальной. Тело, которое движется в инерциальной системе по инерции, относительно неинерциальной системы движется с ускорением. Поэтому законы Ньютона справедливы только для инерциальных систем отсчета.
1.5. Величины в классической механике можно разделить на две группы: относительные и инвариантные (абсолютные). Относительные величины: координаты, перемещение, скорость зависят от системы отсчета. Инвариантные величины: силы, ускорения, массы, расстояния и размеры тел, а также время не зависят от системы отсчета (инвариантны по отношению к системе отсчета).
1.6. Принцип относительности Галилея. Согласно ему, все механические явления в инерциальных системах отсчета при одинаковых начальных условиях протекают одинаково относительно своей системы отсчета. Из этого принципа следует, что невозможно внутри системы поставить опыт, который бы дал ответ, движется ли эта система или покоится.
2. II закон Ньютона. Если на свободное тело действует другое тело, то его движения отклоняется от инерциального - тело приобретает ускорение. Разные тела, в зависимости от количества вещества в теле, по-разному реагируют на взаимодействие. Масса – это мера инертности тела, т.е. мера сопротивления тела действию на него другого тела. Масса измеряется в килограммах. Эталон килограмма – это металлический цилиндр, масса которого равна массе 1 дм2 дистиллированной воды при температуре 0⁰С. Сила – это мера взаимодействия тел. Второй закон Ньютона определяет силу, как векторную величину F =m a. Размерность силы [F] = кг м/сек2 =Н (ньютон). Единица силы - 1Н. Смысл 2-го закона Ньютона в том, что ускорение, приобретаемое телом при взаимодействии a = F /m
2.1. Иначе этот закон можно записать, используя понятия импульса. Поскольку a = Δ V / Δt, то: a Δt = F Δt /m или mΔ V = F Δt или Δ(m V) = F Δt. F Δt – называется импульс силы, m V – импульс тела. И 2-й закон Ньютона можно сформулировать таким образом: изменение импульса тела равно импульсу, действующей на него силы. Формулировка закона в импульсной форме удобна тем, что она подходит для случая, когда масса тела изменяется, например, при приближении скорости тела к скорости света.
2.2. Если тело взаимодействует одновременно с несколькими телами, то для вычисления их действия используется принцип суперпозиции сил. Он утверждает, что силы не влияют друг на друга и равнодействующая нескольких сил равна их векторной сумме: R = Σ F i = m a.
2.3. Все силы, фигурирующие в механике относятся к двум фундаментальным взаимодействиям: гравитационному и электромагнитному. Гравитационное – это сила тяжести, описываемая законом всемирного тяготения Ньютона. Электромагнитные силы – это силы взаимодействия заряженных тел и токов: Кулона и Ампера. К ним же относятся силы, порожденные межатомным взаимодействием: сила давления, все виды сил упругости, в том числе, сила реакции опоры и натяжения нити, а также все виды сил трения.
3. II закон Ньютона в неинерциальных системах отсчета. Рассмотрим случай неинерциальной системы отсчета, когда система движется поступательно с постоянным ускорением аи. Любое свободное тело такой системе приобретает относительно нее ускорение – аи, как будто на него действует сила Fи = - m aи. Эта сила называется силой инерции. Во всем остальном система подобна инерциальной, поэтому II закон Ньютона приобретает в ней вид Σ F i + F и = m a или Σ F i = m a - m aи
Рассмотрим теперь случай, когда система вращается с постоянной угловой скоростью ω вокруг оси О. Если тело относительно такой системы неподвижно, значит оно движется вместе с ней с угловой скоростью ω и должно стремиться двигаться от оси О с ускорением ацб = ω2 R, где R – расстояние до оси О, как будто на него действует сила F цб = m a ЦБ Эта сила называется центробежной, она наблюдается только относительно неинерциальной системы отсчета. В частности, Земля, вследствие вращения вокруг своей оси является неинерциальной системой отсчета. И вес тела, измеренный пружинными весами, отличается от силы тяжести на величину центробежной силы.
4. III закон Ньютона утверждает, что тело А действует на тело В с какой-то силой, то тело В действует на тело А с силой одинаковой про величине, лежащей на той же прямой и противоположной по направлению, или иначе говоря, сила действия равна силе противодействия. Это закон, как и все прочие, получен экспериментально, и вытекает из факта, что если взаимодействуют два тела с массами m1 и m2, то a1/a2 = m2/m1, значит, a1m1 = a2m2 и F1 =F2.
5. Сила трения. Существуют несколько разновидностей сил трения:
5.1. Сила трения покоя. Эта сила действует на тело, прижатое к другому телу силой, направленной перпендикулярно поверхности контакта (силой нормального давления). Она появляется только тогда, когда появляется т.н. сдвигающая сила, которая параллельна плоскости контакта и пытается сдвинуть одно тело относительно другого. Сила трения покоя направлена параллельно плоскости контакта, противоположно направлению сдвигающей силы и равна ей по величине. В результате сдвигаемое тело покоится. Чем больше сдвигающая сила, тем больше величина силы трения покоя. Она растет только до определенного максимального значения, а затем тело начинает двигаться и появляется новая разновидность силы трения:
5.2. Сила трения скольжения. Сила трения скольжения равна максимальному значению силы трения покоя, но в отличии от нее она направлена в сторону противоположную перемещению тела (а не сдвигающей силы). Сила трения покоя не зависит от площади контакта двух тел (закон Кулона-Амонтона), а определяется только свойствами поверхностей трущихся тел и она пропорциональна силе нормального давления и. Fтр.ск.=Fтр. пок.макс = μN, где N – сила нормального давления. Природа силы трения покоя и скольжения двояка. С одной стороны – это влияние неровностей на трущихся поверхностях, чисто механического зацепления их друг за друга. С другой стороны – это результат притяжения друг к другу молекул на поверхностях трущихся тел. Поэтому очень глубокая шлифовка поверхностей может не уменьшить, а увеличить силы трения – молекулы контактируют друг с другом по всей поверхности и тела, как бы «прилипают» друг к другу.
5.3.  Сила трения качения. Эта сила направлена, как и сила трения скольжения, в сторону, противоположную направлению движения. Однако, ее природа отлична от природы сил сухого трения. Она связана с деформацией поверхности колеса в месте его контакта с дорогой – колесо становиться в этом месте плоским, в результате точка приложения силы реакции опоры оказывается смещенной вперед и возникает ее компонента Ft, направленная назад. Поэтому сила трения качения зависит от радиуса колеса: чем больше радиус, тем меньше влияние деформации на его движение и тем меньше сила трения.
Сила трения качения. Эта сила направлена, как и сила трения скольжения, в сторону, противоположную направлению движения. Однако, ее природа отлична от природы сил сухого трения. Она связана с деформацией поверхности колеса в месте его контакта с дорогой – колесо становиться в этом месте плоским, в результате точка приложения силы реакции опоры оказывается смещенной вперед и возникает ее компонента Ft, направленная назад. Поэтому сила трения качения зависит от радиуса колеса: чем больше радиус, тем меньше влияние деформации на его движение и тем меньше сила трения.
Следует заметить, что на катящееся колесо, может действовать одновременно и сила трения покоя. Легко заметить, что в области контакта колеса с поверхностью, оно относительно нее неподвижно. В том случае, когда к колесу приложен момент силы, например, от двигателя транспортного средства и колесо пытается провернуться, т.е. в месте контакта с дорогой заскользить. При этом ему начинает мешать сила трения покоя. Благодаря ней у любого колесного транспорта возникает и сила тяги, и сила торможения.
5.4. Предыдущие виды сил являются силами сухого трения, где обе трущиеся поверхности – твердые тела. При движении тела в жидкости или газе появляется сила влажного трения или сила сопротивления. Она возникает на поверхности твердого тела при его движении сквозь газ или жидкость. Характерной особенностью силы сопротивления является ее зависимость от скорости движения. При маленьких скоростях она растет пропорционально скорости в первой степени Fс = αV, а при больших – скорости в квадрате Fс = αV2. Все жидкости по отношению к силе сопротивления делятся на ньютоновские и реологические. В ньютоновских жидкостях тело начинает двигаться при самой маленькой, приложенной к нему силе. В реологических жидкостях имеется аналог силы трения покоя, когда, сдвинуть тело удается, только приложив к нему достаточную по величине силу.
6.  Вес тела. Вес – это сила, действующая на опору или подвес, препятствующая падению тела под действием силы тяжести. Сила веса – это чаще всего сила упругости, но может быть и силой Кулона или Ампера. Природа силы веса всегда электромагнитная, поскольку и сила упругости имеет ту же природу. Для опоры, которая не имеет вертикального ускорения, сила веса равна по величине и направлению силе тяжести, но – существенно – она отличается от силы тяжести тем, приложена не к телу, а к опоре. Если опора перемещается с вертикальным ускорением, то вес тела изменяется. Вес P = - N по 3-му закону Ньютона. А по II закону Ньютона уравнение движение тела N +m g = m a, т.е. P = m (g – a). В скалярной форме, если ускорение направлено вниз, то P= m (g – a) и вес уменьшается. Если a=g то вес Р=0 – невесомость. Если ускорение направлено вверх, то P= m (g + a) и вес увеличивается – перегрузка.
Вес тела. Вес – это сила, действующая на опору или подвес, препятствующая падению тела под действием силы тяжести. Сила веса – это чаще всего сила упругости, но может быть и силой Кулона или Ампера. Природа силы веса всегда электромагнитная, поскольку и сила упругости имеет ту же природу. Для опоры, которая не имеет вертикального ускорения, сила веса равна по величине и направлению силе тяжести, но – существенно – она отличается от силы тяжести тем, приложена не к телу, а к опоре. Если опора перемещается с вертикальным ускорением, то вес тела изменяется. Вес P = - N по 3-му закону Ньютона. А по II закону Ньютона уравнение движение тела N +m g = m a, т.е. P = m (g – a). В скалярной форме, если ускорение направлено вниз, то P= m (g – a) и вес уменьшается. Если a=g то вес Р=0 – невесомость. Если ускорение направлено вверх, то P= m (g + a) и вес увеличивается – перегрузка.

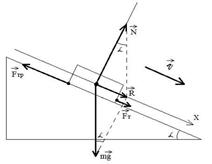 Вес тела на наклонной плоскости. Как видно из треугольника сил, сила нормального давления N =mg cosα. По 3-му закону Ньютона вес Р = N = mg cosα. Он перпендикулярен наклонной плоскости и направлен вниз.
Вес тела на наклонной плоскости. Как видно из треугольника сил, сила нормального давления N =mg cosα. По 3-му закону Ньютона вес Р = N = mg cosα. Он перпендикулярен наклонной плоскости и направлен вниз.
Вес тела в жидкости. При погружении тела в жидкость вес тела уменьшается на величину равную весу вытесненной телом жидкости (закон Архимеда). Вес вытесненной жидкости Рж=ρжWg, где ρж –плотность жидкости, а W – объем тела. Сила тяжести, действующая на тело mg = ρт Wg, где ρт – плотность вещества тела. Значит вес тела в жидкости P= Wg (ρт - ρж). Если ρт > ρж, то тело тонет, а если ρт < ρж, то плавает.