Общая часть.
1.1 Механизм передвижения широко представлен в металлургическом
производстве тележками крановых механизмов. Обычно кран имеет две тележки: тележку передвижения и грузовую тележку.
Грузовая тележка присутствует в единственном числе, но в некоторых случаях их число может быть доведено до двух.
К приводу тележек предъявляются довольно жесткие требования: он должен обеспечивать быстрый и в то - же время плавный разгон, постоянство ускорения независимо от скорости переключения контактов командоконтроллера, возможность реверса, высокую надежность и стабильность работы в условиях как высоких, так и низких температур, а также при высокой влажности, запыленности окружающей среды и присутствии агрессивных газов и дыма.
Кроме того, электропривод должен быть безопасным в эксплуатации и простым в ремонте.
По надежности электроснабжения этот привод можно отнести к "особой группе" первой категории.
1.2 Электроприводом называется электромеханическое устройство, предназначенное для электрификации и автоматизации рабочих процессов и состоящее из преобразовательного, электродвигательного, передаточного и управляющего механизмов. В отдельных случаях преобразовательный и передаточный механизмы могут отсутствовать.
Достоинствами электропривода являются: возможность простого и экономичного преобразования электрической энергии в механическую;
Возможность изготовления двигателя любой необходимой мощности, что позволяет использовать индивидуальный привод отдельных рабочих механизмов машины; высокая управляемость привода, его надежность; упрощенная конструкция рабочей машины, малые габариты и масса привода; широкий диапазон и плавность регулирования скорости и т.п.
Наиболее часто применяемым типом электродвигателя является асинхронная машина с фазным ротором, т.к. обеспечивает достаточное регулирование ускорения. Асинхронные же двигатели с короткозамкнутым ротором не находят широкого применения из-за чрезмерно больших ускорений и пусковых токов, что не всегда приемлемо при переносе краном таких грузов, как жидкий металл, шлак и т.д.
Применение привода постоянного тока нежелательно, т.к. он имеет пониженную надежность из-за износа коллекторного узла и его быстрого выхода из строя, особенно это касается условий его работы при загрязненности атмосферы цеха.
Исходя из всего перечисленного, выбираем в качестве основы привода асинхронную машину с фазным ротором.
Питание двигателя привода тележки будет осуществляться через гибкие троллеи, т.к. тележка имеет диапазон передвижения по направляющим 28 метров и применение жестких троллей не оправдано.
Специальная часть.
2.1 Схема управления должна отвечать всем требованиям, заданным в п.1.1. Наиболее распространенной схемой является схема, построенная на основе командоконтроллера. Она имеет высокую ремонтопригодность, дешевую элементную базу и большую надежность.
Контроль нулевого положения командоконтроллера SA осуществляет реле KS, контакт которого подает питание на схему управления.
В первом положении "Вперед" включаются контакторы KM1 и KM2, которые подключают статор двигателя к сети. Блок-контакт КM2 включает реле K, которое включает контактор тормозного электромагнита KM3. При этом двигатель растормаживается и идет в ход при полностью включенном в цепь ротора реостате (кривая 1 на рисунке 1).
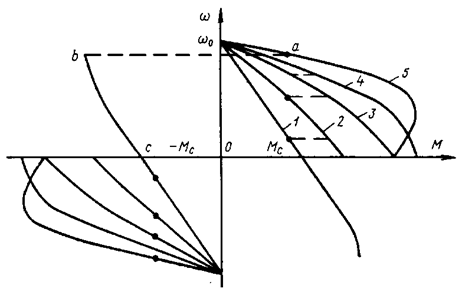 |
Во втором положении контроллера включается контактор KM4 (см. графическую работу, лист 1), который шунтирует предварительную ступень пускового реостата (двигатель работает на характеристике 2, рисунок 1).
Рисунок 1 - Механические характеристики кранового электродвигателя.
Машинист может установить ручку командоконтроллера сразу в крайнее правое положение. Разгон будет осуществляться автоматически, в функции времени, с помощью реле KAT1 - KAT3 (см. графическую работу, лист 1). Блок-контакт KM4 разомкнет цепь катушки первого ускоряющего реле KAT1, и последнее с выдержкой времени включит первый ускоряющий контактор KM5. Аналогично с помощью реле KAT2 и KATЗ включаются ускоряющие контакторы соответственно KM6 и KM7.
Для питания катушек реле времени служит выпрямитель; контактор KM6, включившись, своим блок-контактом, отключит от сети выпрямитель, а вместе с ним и катушку реле KATЗ. Двигатель будет работать на характеристиках 3, 4, 5 (см. рисунок 1).
В цепи ротора всегда остается невыключенной часть реостата. Этим смягчается механическая характеристика (кривая 5 на рисунке 1), благодаря чему массы двигателя и крана в большей степени помогают двигателю преодолевать пиковые перегрузки.
Как отмечалось, электропривод может работать в двигательном режиме и в режиме торможения противовключением. Если при движении крана «Вперед» рукоятку командоконтроллера SA (см. графическую работу, лист 1) перевести в любое положение «Назад», контактор KM1 отключит двигатель от сети, а затем включится контактор KM8 и реле KCC. Контакторы ускорения KM5—KM7, KM4 отключаются, и в цепь ротора будет введен весь реостат. В момент перехода командоконтроллера SA через нулевое положение кратковременно отключится реле K, контакт которого шунтирует добавочный резистор R1 в цепи реле KCC. Этим осуществляется форсировка включения реле KCC. Если рукоятка SA была переведена в первое положение «Назад», то после окончания процесса торможения кран останавливается. Если рукоятка была установлена во 2, 3 или 4-е положения, то после снижения скорости до 10% от номинальной отключается реле KCC, которое своим контактом подключает цепь питания ускоряющих контакторов, и начинается автоматический разгон двигателя в направлении «Назад».
Торможение осуществляется по линии abc (см. рис. 1): по линии аb — переход двигателя в режим торможения противо-включением и по линии ba — его замедление и остановка.
Контакты конечных выключателей SQ1, SQ2, размыкающиеся в предельно крайних положениях, и контакт максимального реле KA включены в цепь реле KS (см. графическую работу, лист 1). Максимальное реле состоит из трех катушек с подвижным якорем, воздействующих на один общий контакт.
Как отмечалось, аппаратура управления и тормозные электрод-магниты постоянного тока отличаются сравнительно высокой износостойкостью, долговечностью, надежностью, большой допустимой частотой включения и т. п. Поэтому для кранов, работающих в режимах Т и ВТ, используются магнитные контроллеры типов К, КС ДК.
2.2 Построение нагрузочной диаграммы механизма.
2.2.1 Определяем передаточное число редуктора привода тележки:
(1)
где R - радиус колеса тележки, м;
n - частота вращения вала приводного двигателя, об/мин;
V - заданная скорость тележки, м/мин;
2.2.2 Определяем статические моменты на входном валу редуктора при холостом и рабочем пробегах тележки:
(2)
где k1 = 1,25 - коэффициент, учитывающий трение реборды колеса тележки о рельс;
G - сила тяжести перемещаемого груза;
m = 0,015÷ 0,15 - коэффициент трения в опорах ходовых колес;
r - радиус цапфы;
f - коэффициент трения качения ходовых колес по рельсам;
i - передаточное число редуктора;
h - КПД редуктора;
 |
 |

2.2.3 Строим нагрузочную диаграмму механизма:
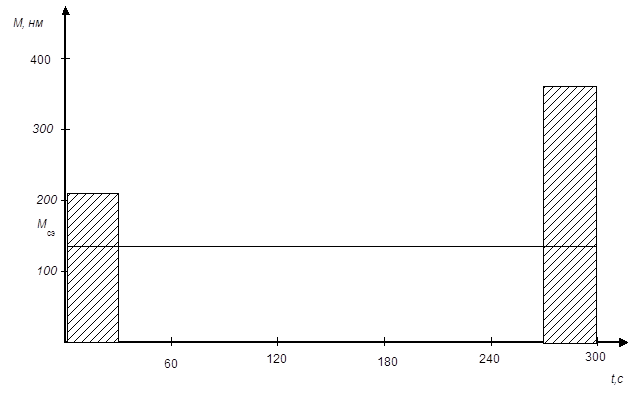 |
Рисунок 2 - Нагрузочная диаграмма механизма.
2.3 Расчет мощности двигателя и его выбор.
2.3.1 Определяем продолжительность включения ПВ:
(3)
где t1 ,t2 ,t3,tn, - длительности включений механизма передвижения;
t0 - суммарное время простоя механизма за рабочий цикл;
 |
2.3.2 Определяем эквивалентный момент:
(4)
Где Mi - величина момента в некотором рабочем режиме;
Tц - время рабочего цикла;
ti - длительности действия соответствующих моментов на вал приводного двигателя;
 |
2.3.3 Находим расчетную мощность двигателя:
 (5)
(5)
где kз =1,3 - коэффициент запаса, учитывающий неучтенные моменты в редукторе;
Мс.э - эквивалентный статический момент;
w расч. - угловая скорость выбираемого приводного двигателя;

Пересчитываем расчетную мощность двигателя при ПВ =20% на ПВ= 40%, для того, чтобы выбрать электрическую машину из справочника:
 (6)
(6)
 |
2.3.4 Выбираем конкретный двигатель - МТF312-6, асинхронную машину с фазным ротором с осевым моментом инерции Jдв .=0,312 кг×м2, номинальной частотой вращения 965 об/мин., номинальными токами статора и ротора соответственно 38 и 60 А и мощностью 15 кВт.
2.3.5 Для определения момента инерции на входном валу редуктора переходим от поступательного движения тележки к вращательному движению некого цилиндрического тела, посаженного на вал электродвигателя, создающего те - же статические и динамические нагрузки:
(7)
где V2 - квадрат скорости поступательно движущейся тележки;
m - масса тележки;
J - осевой момент инерции;
w2 - квадрат угловой частоты вращения вала двигателя;
Выделяем переменную j из вышеуказанного равенства:

(8)

 |
Таким образом, мы получили приведенные осевые моменты инерции порожней и нагруженной тележки без учета моментов инерции соединительной муфты и тормозного шкива.
2.3.6 Зная приведенные моменты инерции мы можем определить полный осевой момент инерции системы "двигатель - механизм" как для полностью загруженного, так и для порожнего механизма передвижения:

(9)
где Jдв. - паспортный осевой момент инерции приводного двигателя;
Jх.х.(р.х) - приведенный осевой момент инерции на валу двигателя для холостого и загруженного состояний механизма передвижения без учета момента инерции двигателя, соединительной муфты и тормозного шкива;
Jм - момент инерции соединительной муфты (Jм=0,15×Jдв.);
Jш - момент инерции тормозного шкива (Jш=0,2×Jдв.);
 |
 |
2.3.7 Определяем динамические моменты для построения уточненной нагрузочной диаграммы:
(10)
где J - (см. формулу 8);
Dw - изменение угловой скорости;
Dt - время разгона механизма;
 |
Mд.х. и Mд.р. - динамические моменты разгона и торможения для холостого и загруженного состояний тележки механизма передвижения.
2.3.8 Строим уточненную нагрузочную диаграмму механизма с тахограммой:
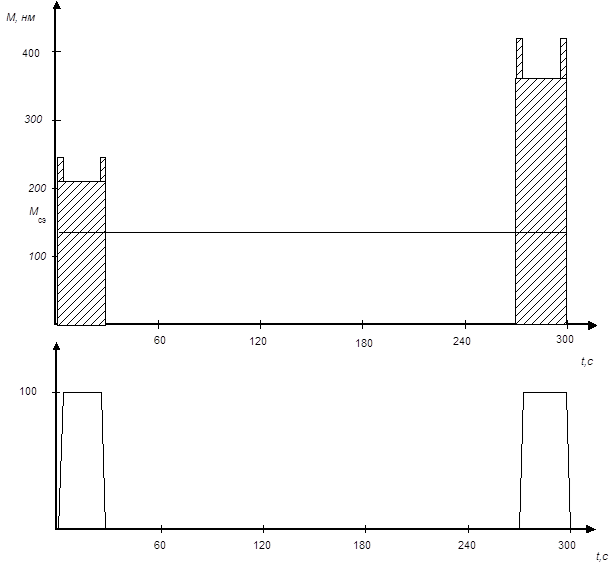 |
Рисунок 3 - Нагрузочная диаграмма механизма с тахограммой.
2.3.9 Проверяем выбранный двигатель по нагреву:
(11)
Эквивалентный момент вычисляем по формуле 4:
 |
Определяем рабочий момент двигателя:
(12)
 |
В случае, если двигатель подходит для заданной интенсивности работы, момент эквивалентный на его валу должен быть меньше номинального, т.е. должно выполнятся неравенство 13:
(13)
 |
Двигатель выбран правильно.
2.4 Выбор релейно-контактной аппаратуры.
2.4.1 Для управления асинхронным электродвигателем привода используем магнитный контроллер ТА-63 [6], т.к. он обеспечивает все необходимые режимы работы для механизма перемещения и подходит по допустимой мощности двигателя.
2.4.2 Для ограничения передвижения кранового моста в схеме использованы конечные выключатели.
Контакты конечных выключателей, как правило, включаются в цепи управления - в цепи катушек контакторов и реле.
В качестве конечных выключателей выбираем получившие наибольшее распространение в крановых установках отечественного производства выключатели серии КУ-700А.
2.4.3 Крановые резисторы предназначены для обеспечения пуска, регулирования скорости и торможения электродвигателей постоянного и переменного тока.
При расчете и выборе пускорегулирующих резисторов должны выполнятся одновременно два условия:
1) Получение необходимых механических характеристик электроприводов, обеспечивающих требуемый режим пуска и необходимый диапазон регулирования.
2) Обеспечение соответствия теплового режима резистора режиму работы электродвигателя.
Для правильного выбора пусковых токоограничивающих резисторов определяем значение эквивалентного тока:
(14)
где Iдл.- длительный ток;
Iпв - ток двигателя при некоторой продолжительности включения;
ПВ - значение фактической продолжительности включения, %;
 |
Зная длительный ток выбираем тип ящиков резисторов в роторную цепь: 2ТД.754.054-10.
2.5 Расчет токов уставок и выбор аппаратуры защиты.
2.5.1 Аппаратура защиты присутствует в схеме магнитного контроллера, поэтому нет необходимости в её выборе, однако следует указать токовые значения настроек защитной аппаратуры исходя из данных справочника [2]:
а) Ток уставки защитного реле, А: 130;
б) Ток номинальный расцепителя автомата, А: 40;
в) Ток мгновенный отсечки автомата, А: 260;
2.6 Расчет и выбор структуры и сечения кабелей.
2.6.1 Ток ротора больше тока статора и его длительный эквивалент уже определен (расчёт по формуле 14), поэтому цепь статора с меньшим током запитываем кабелем, выбираемым в роторную цепь:
а) Для обеспечения питания роторной цепи выбираем кабель
ПВГ (3*10) мм2;
б) Статорную цепь запитываем кабелем ПВГ (3*10) мм2;
в) Управляющую схему запитываем посредством провода марки ПГВ;
г) Конечные выключатели целесообразно подключить к схеме управления контрольным четырехжильным кабелем типа КСРГ;
Техника безопасности
Оперативное обслуживание.
Б2.1.1.2 Оперативное обслуживание электроустановок может осуществляться как местным оперативным или оперативно-ремонтным персоналом[1], за которым закреплена данная электроустановка, так и выездным, за которым закреплена группа электроустановок.
Лицам из оперативно-ремонтного персонала, обслуживающим электроустановки, эксплуатируемые без местного оперативного персонала, при осмотре электроустановок, оперативных переключениях, подготовке рабочих мест и допуске бригад к работе и т. п. в соответствии с настоящими Правилами и «ПТЭ электроустановок потребителей» предоставляются все права и обязанности оперативного персонала.
Вид оперативного обслуживания, число лиц из оперативного персонала в смену или на электроустановке определяются лицом, ответственным за электрохозяйство, по согласованию с администрацией предприятия (организации) и указываются в местных инструкциях.
Б2.1.2. К оперативному обслуживанию электроустановок допускаются лица, знающие оперативные схемы, должностные и эксплуатационные инструкции, особенности оборудования и прошедшие обучение и проверку знаний в соответствии с указаниями настоящих Правил.
Б2.1.3. Лица из оперативного персонала, обслуживающие электроустановки единолично, и старшие в смене или бригаде, за которыми закреплена данная электроустановка, должны иметь группу по электробезопасности не ниже IV в установках напряжением выше 1000 В и III в установках напряжением до 1000 В.
Б2.1.4. Оперативный персонал должен работать по графику, утвержденному лицом, ответственным за электрохозяйство предприятия или структурного подразделения.
В случае необходимости с разрешения лица, утверждавшего график, допускается замена одного дежурного другим.
Б2.1.7. Приемка и сдача смены во время ликвидации аварии, производства переключении или операций по включению и отключению оборудования запрещается.
При длительном времени ликвидации аварии сдача смены осуществляется с разрешения администрации.
Б2.1.8. Приемка и сдача смены при загрязненном оборудовании. неубранном рабочем месте и обслуживаемом участке запрещается.
Приемка смены при неисправном оборудовании или ненормальном режиме его работы допускается только с разрешения лица, ответственного за данную электроустановку, или вышестоящего лица, о чем делается отметка в оперативном журнале.
Б2.1.9. Лицо из оперативного персонала во время своего дежурства является ответственным за правильное обслуживание и безаварийную работу всего оборудования на порученном ему участке.
Б2.1.12. При нарушении режима работы, повреждении или аварии с электрооборудованием оперативный персонал обязан самостоятельно и немедленно с помощью подчиненного ему персонала принять меры к восстановлению нормального режима работы и сообщить о происшедшем непосредственно старшему по смене или лицу, ответственному за электрохозяйство.
В случае неправильных действий оперативного персонала при ликвидации аварии вышестоящее лицо обязано вмешаться вплоть до отстранения дежурного и принять на себя руководство и ответственность за дальнейший ход ликвидации аварии.
Б2.1.13. Оперативный персонал обязан проводить обходы и осмотры оборудования и производственных помещений на закрепленном за ним участке.
Осмотр электроустановок могутвыполнять единолично:
а) лицо из административно-технического персонала с группой по электробезопасности V в установках напряжением выше 1000 В и с группой IV в установках напряжением до 1000 В;
б) лицо из оперативного персонала, обслуживающего данную электроустановку, с группой по электробезопасности не ниже III.
Список лиц из административно-технического персонала, которым разрешается единоличный осмотр, устанавливается распоряжением лица, ответственного за электрохозяйство.
Б2.1.14. При осмотре распределительных устройств (РУ), щитов, шинопроводов, сборок напряжением до 1000 В запрещается снимать предупреждающие плакаты и ограждения, проникать за них, касаться токоведущих частей и обтирать или чистить их, устранять обнаруженные неисправности.
Б2.1.17. Осмотры, выявление и ликвидация неисправностей в электроустановках без постоянного дежурного персонала производятся централизованно выездным персоналом, осуществляющим надзор и работы по объекту (или группе объектов), периодичность которых устанавливается ответственным за электрохозяйство в зависимости от местных условий. Результаты осмотров фиксируются в оперативном журнале.
Б2.1.18. Лица, не обслуживающие данную электроустановку, допускаются к осмотру с разрешения лица, ответственного за электрохозяйство предприятия, цеха, участка.
Б2.1.19. Двери помещений электроустановок (щитов, сборок и т. п.) должны быть постоянно заперты.
Для каждого помещения электроустановки должно быть не менее двух комплектов ключей, один из которых является запасным. Ключи от помещений РУ не должны подходить к дверям ячеек и камер.
Б2.1.20. Ключи должны находиться на учете у оперативного персонала. В электроустановках без постоянного оперативного персонала ключи должны находиться на пункте управления у старшего по смене лица из оперативного персонала. Ключи должны выдаваться под расписку:
а) на время осмотра лицам, которым разрешен единоличный осмотр, и лицам из оперативно-ремонтного персонала, в том числе и не находящимся в смене, при выполнении ими работ в электропомещениях;
б) на время производства работ по наряду или по распоряжению ответственному руководителю работ, производителю работ или наблюдающему.
Ключи выдаются при оформлении допуска и подлежат возврату ежедневно по окончании работы вместе с нарядом.
При производстве работ в электроустановках без постоянного оперативного персонала ключи подлежат возвращению не позднее следующего дня после полного окончания работ.
Производство работ.
Б2.1.27. При работе в электроустановках напряжением до 1000 В без снятия напряжения на токоведущих частях и вблизи них необходимо:
оградить расположенные вблизи рабочего места другие токоведущие части, находящиеся под напряжением, к которым возможно случайное прикосновение;
работать в диэлектрических галошах или стоя на изолирующей подставке либо на диэлектрическом ковре;
применять инструмент с изолирующими рукоятками (у отверток, кроме того, должен быть изолирован стержень); при отсутствии такого инструмента пользоваться диэлектрическими перчатками.
Б2.1.28. При производстве работ без снятия напряжения на токоведущих частях с помощью изолирующих средств защиты необходимо:
держать изолирующие части средств защиты за рукоятки до ограничительного кольца;
располагать изолирующие части средств защиты так, чтобы не возникла опасность перекрытия по поверхности изоляции между токоведущими частями двух фаз или замыкания на землю;
пользоваться только сухими и чистыми изолирующими частями средств защиты с неповрежденным лаковым покрытием.
При обнаружении нарушения лакового покрытия или других неисправностей изолирующих частей средств защиты пользованиеими должно быть немедленно прекращено.
Б2.1.30. Без применения электрозащитных средств запрещается прикасаться к изоляторам электроустановки, находящейся под напряжением.