Оглавление
1. Постановка задачи
. Теоретические сведения
2.1. Динамика пространственного движения самолета
. Оптимальное управление дискретными системами
. Полная управляемость системы по состоянию
3. Начальные данные
. Ход решения задачи
. Результаты вычислений
. Графики
Выводы
Список использованной литературы
Приложение (текст программы - 1 случай) [Mathcad 14]
Постановка задачи
Дано:
Система дифференциальных уравнений, описывающая движение высокоманевренного фронтового истребителя:

Фазовые координаты:  , управление:
, управление:  .
.
 - угловая скорость крена;
- угловая скорость крена;
 - угловая скорость рыскания;
- угловая скорость рыскания;
 - угол скольжения;
- угол скольжения;
 - угол крена;
- угол крена;
 - угол рыскания;
- угол рыскания;
 - управление углом ;
- управление углом ;
 - управление креном.
- управление креном.
СДУ представима в виде:  ,
,
где 
Функционал качества управления:
 .
.
Требуется:
1). От системы ДУ, используя метод Эйлера перейти к разностной схеме, шаг при переходе -  сек., время -
сек., время -  сек.
сек.
). Проверить систему на управляемость.
). Построить графики:  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
). При заданных матрицах  и
и  - проверить влияния матрицы
- проверить влияния матрицы  .
.
1.
Теоретические сведения
Динамика пространственного движения самолета
Угол рыскания - угол поворота корпуса самолёта в горизонтальной плоскости, отсчитываемый от направления на север. Этот угол сходен с курсом, но отсчитывается строго в соответствии с выбранной системой координат.
Угол крена - угол, характеризующий поворот самолёта вокруг его продольной оси.
Угол скольжения - угол между воздушной скоростью самолета и плоскостью симметрии самолета.
Управление углом крена самолета осуществляется элеронами, управление углом и углом рыскания - рулем направления.
Оптимальное управление дискретными системами
Пусть математическая модель объекта управления описывается разностным уравнением:
 ,
,  ,
,
с начальным условием:  ,
,
а функционал качества управления имеет вид:
 ,
,
где: 
 - матрицы размера
- матрицы размера  и
и  ;
;
 - симметричная, положительно определенная матрица
- симметричная, положительно определенная матрица  ,
,
 - симметричные, неотрицательно определенные матрицы
- симметричные, неотрицательно определенные матрицы  .
.
Требуется, зная начальное состояние, выбрать такое допустимое управление для системы, которое придаёт функционалу минимальное значение, т.е. в задаче ищется  .
.
Алгоритм поиска оптимального управления дискретной системой:
). Обратный ход алгоритма (вычисляются вспомогательные матрицы):

). Прямой ход алгоритма (вычисляются фазовые координаты и управление):

Полная управляемость системы по состоянию
Теорема 1: Линейная нестационарная система
,
является полностью управляемой по состоянию только в том случае, если матрица  имеет ранг
имеет ранг  :
:

2
Начальные данные
Вариант № 2, Режим № 8.
1). Коэффициенты  для 11 режима полета высокоманевренного фронтового истребителя.
для 11 режима полета высокоманевренного фронтового истребителя.
         
| |||||||||
| 0,0919 | 3,1215 | 2,1499 | 0,014 | 0,8929 | 0,3877 | 0,0279 | 0,9998 | 0,59 | 0,13 |
        
| |||||||||
| 1,9603 | 21,6404 | 17,3369 | 0,0298 | -0,3603 | -0,0753 | 0,022 | 0,01 | 0,12 |
2). Вектор начальных значений фазовых координат.
 .
.
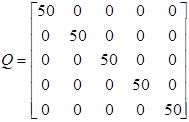
). Матрицы функционала качества управления (для 6 различных случаев).
А).  ,
,  .
.
Б).  ,
,  .
.
В).  ,
,  .
.
Г).  ,
,  .
.
Д).  ,
,  .
.
Е).  ,
,  .
.
 (одинакова для всех случаев).
(одинакова для всех случаев).
3
Ход решения задачи
1). От системы ДУ  перейдем к разностной системе, используя метод Эйлера с шагом
перейдем к разностной системе, используя метод Эйлера с шагом  сек.
сек.
 =>
=>
 =>
=>
 =>
=>
 =>
=>
 =>
=>
 , где
, где  .
.
). Запишем матрицы  ,
,  .
.
 ,
,
 .
.
). Запишем функционал качества управления для дискретной системы.
 .
.
). Найдем оптимальное управление и соответствующие фазовые координаты, исходя из условия  , по вышеизложенному алгоритму с помощью уравнения Беллмана.
, по вышеизложенному алгоритму с помощью уравнения Беллмана.
). Проверим систему на управляемость.
Согласно теореме 1, найдем матрицу  и вычислим ее ранг.
и вычислим ее ранг.
 =>
=>
система - полностью управляема по состоянию.
4
Результаты вычислений
Случай.

| |||||
     
| |||||
| 1.5 | |||||
| 6.614928 | -2.349614 | 2.544569 | 2.43 | 0.89 | |
| -29.285287 | -1.219423 | 0.202584 | 10.4555 | 0.29295 | |
| 12.681284 | 0.398913 | -0.010775 | -18.005772 | -1.120235 | |
| -5.185979 | 0.524958 | -0.436129 | -5.739904 | 1.092316 | |
| 10.923501 | 0.440143 | 0.024031 | -11.293008 | 1.84935 | |
| -3.20727 | 0.14413 | -0.123873 | -0.742121 | 3.261729 | |
| 5.78447 | 0.106238 | 0.068243 | -4.041849 | 3.369521 | |
| -2.318427 | 0.020945 | -0.076765 | 1.639523 | 3.868353 | |
| 3.960249 | 2.608373e-3 | 0.044087 | -0.674866 | 3.674333 | |
| -2.123644 | -0.058426 | -0.063303 | 3.277095 | 3.755656 | |
| 3.450588 | -0.08655 | 0.022636 | 1.220694 | 3.35481 | |
| -2.516761 | 7.266306e-3 | -0.104745 | 4.734553 | 3.197075 | |
| 4.311572 | 0.151688 | 0.100444 | 2.260851 | 2.629873 | |
| -6.25145 | 0.157603 | 0.22336 | 6.505535 | 2.37829 | |
| 0.172774 | -0.938737 | 0.710059 | 0.226154 | 1.618115 |

| ||
 
| ||
| -1.009625 | -2.279648 | |
| -4.154053 | -1.586928 | |
| -1.892681 | 0.762542 | |
| 0.314581 | -0.414966 | |
| 0.496131 | 0.164278 | |
| 0.386169 | -0.479789 | |
| 0.077545 | -8.593071e-3 | |
| 0.091896 | -0.278968 | |
| 0.036791 | -6.552785e-3 | |
| 0.076844 | -0.155915 | |
| 0.032647 | -2.760504e-3 | |
| 0.035632 | -0.074116 | |
| 1.448854e-5 | 0.021294 | |
| -5.190081e-3 | -6.736298e-3 | |
| -0.030735 | 0.05556 |
Случай.
|
| |||||
   
| |||||
| 1.5 | |||||
| 6.129498 | -2.352163 | 2.544406 | 2.43 | 0.89 | |
| -29.461477 | -1.214119 | 0.210944 | 9.971574 | 0.292619 | |
| 12.378299 | 0.409608 | -7.269674e-3 | -18.673857 | -1.061805 | |
| -5.389253 | 0.549299 | -0.43471 | -6.723965 | 1.232306 | |
| 10.897833 | 0.46917 | 0.025207 | -12.504544 | 2.110591 | |
| -3.413099 | 0.183854 | -0.129039 | -2.008567 | 3.672129 | |
| 6.059615 | 0.147011 | 0.069701 | -5.550226 | 3.937058 | |
| -2.616786 | 0.071337 | -0.085597 | 0.36715 | 4.622196 | |
| 4.563664 | 0.03877 | 0.054257 | -2.288053 | 4.587412 | |
| -2.738081 | -0.034631 | -0.078708 | 2.229856 | 4.867018 | |
| 4.672202 | -0.096584 | 0.013198 | -0.465494 | 4.594934 | |
| -3.109424 | 0.077723 | -0.201646 | 4.259039 | 4.638237 | |
| 7.416524 | 0.421896 | 0.073672 | 1.146348 | 4.137256 | |
| -8.223066 | 0.660344 | 0.364966 | 8.325416 | 4.054541 | |
| -0.573415 | -1.14173 | 1.449207 | -0.203998 | 3.141336 |

| ||
  
| ||
| -1.003797 | -2.251949 | |
| -4.16799 | -1.548899 | |
| -1.910772 | 0.780156 | |
| 0.296237 | -0.390129 | |
| 0.48557 | 0.175247 | |
| 0.379277 | -0.468258 | |
| 0.075848 | -7.415338e-3 | |
| 0.093061 | -0.279792 | |
| 0.042178 | -0.015212 | |
| 0.08542 | -0.167842 | |
| 0.045132 | -0.021135 | |
| 0.051377 | -0.096403 | |
| 0.019353 | -6.590723e-3 | |
| 0.017352 | -0.038783 | |
| -4.833736e-3 | 0.018476 |
Случай.

| |||||
  
| |||||
| 1.5 | |||||
| -1.40575 | -2.175387 | 2.544666 | 2.43 | 0.89 | |
| -3.585641 | -0.968779 | 0.567121 | 2.332029 | 0.3156 | |
| -0.146883 | 0.062133 | -0.220434 | -0.658712 | -0.090185 | |
| 0.714608 | 0.200054 | -0.179604 | -0.848841 | -3.062246e-3 | |
| 0.374294 | 0.066533 | -0.028215 | -0.260753 | 0.124806 | |
| 0.042724 | -9.658054e-3 | 0.020249 | 0.071679 | 0.164745 | |
| -0.043445 | -0.016175 | 0.012297 | 0.120819 | 0.154888 | |
| -0.02862 | -6.045082e-3 | 1.207221e-3 | 0.088125 | 0.138287 | |
| -0.012492 | -1.251925e-3 | -1.471402e-3 | 0.063953 | 0.126926 | |
| -0.010254 | -9.986284e-4 | -5.81666e-4 | 0.052839 | 0.119089 | |
| -0.011975 | -1.349416e-3 | 1.99818e-4 | 0.043703 | 0.112619 | |
| -0.012153 | -1.259356e-3 | 4.275548e-4 | 0.032961 | 0.107199 | |
| -0.0105 | -1.596758e-3 | 4.315781e-4 | 0.02188 | 0.10308 | |
| -3.895641e-3 | -3.085415e-3 | -2.828136e-4 | 0.012542 | 0.100247 | |
| 1.813073e-3 | -1.926203e-3 | -2.902997e-3 | 0.010592 | 0.098341 |

| ||
|
| ||
| -1.013102 | -1.816833 | |
| -4.648489 | -2.603578 | |
| -1.454854 | -0.40422 | |
| 0.28597 | 0.225952 | |
| 0.362794 | 0.139856 | |
| 0.087679 | 6.018131e-3 | |
| -0.02839 | -0.023457 | |
| -0.025013 | -9.642615e-3 | |
| -4.530623e-3 | 1.167433e-3 | |
| 2.143613e-3 | 3.037628e-3 | |
| 1.018819e-3 | 1.954631e-3 | |
| -4.975721e-4 | 1.17068e-3 | |
| -7.000244e-4 | 8.093026e-4 | |
| -1.812931e-4 | 3.126241e-4 | |
| -4.338739e-5 | 5.354513e-4 |
 4 случай.
4 случай.

| |||||

| |||||
| 1.5 | |||||
| -1.406688 | -2.175398 | 2.544665 | 2.43 | 0.89 | |
| -3.585999 | -0.968767 | 0.567132 | 2.331097 | 0.315598 | |
| -0.147074 | 0.062164 | -0.220431 | -0.660018 | -0.090073 | |
| 0.714508 | 0.200096 | -0.179605 | -0.850368 | -2.789661e-3 | |
| 0.374221 | 0.066581 | -0.028216 | -0.262421 | 0.125267 | |
| 0.042649 | -9.606914e-3 | 0.020248 | 0.069893 | 0.165413 | |
| -0.043531 | -0.016121 | 0.012296 | 0.11891 | 0.155777 | |
| -0.028713 | -5.985575e-3 | 1.204766e-3 | 0.086079 | 0.139412 | |
| -0.012581 | -1.18331e-3 | -1.47311e-3 | 0.061759 | 0.128304 | |
| -0.01032 | -9.287444e-4 | -5.781063e-4 | 0.050493 | 0.12074 | |
| -0.011959 | -1.316016e-3 | 2.045864e-4 | 0.041226 | 0.11456 | |
| -0.011813 | -1.302918e-3 | 3.908352e-4 | 0.030456 | 0.109441 | |
| -9.239351e-3 | -1.594063e-3 | 2.686431e-4 | 0.019716 | 0.105617 | |
| -2.017104e-4 | -2.616401e-3 | -5.343933e-4 | 0.011614 | 0.103044 | |
| 5.158174e-3 | -5.520453e-4 | -2.79208e-3 | 0.013072 | 0.10131 |

| ||
|
| ||
| -1.013088 | -1.81678 | |
| -4.648518 | -2.603503 | |
| -1.454888 | -0.404201 | |
| 0.285953 | 0.225964 | |
| 0.362789 | 0.139867 | |
| 0.087677 | 6.027394e-3 | |
| -0.028393 | -0.023448 | |
| -0.025017 | -9.631605e-3 | |
| -4.535048e-3 | 1.179696e-3 | |
| 2.141039e-3 | 3.047115e-3 | |
| 1.024712e-3 | 1.95105e-3 | |
| -4.74313e-4 | 1.142275e-3 | |
| -6.6228e-4 | 7.626443e-4 | |
| -1.313613e-4 | 2.304926e-4 | |
| -5.877152e-6 | 4.395042e-4 |
Случай.

| |||||
|
| |||||
| 1.5 | |||||
| -2.635432 | -1.385632 | 2.36552 | 2.84 | 0.72 | |
| -1.066552 | -0.868977 | 1.050402 | 0.510438 | -0.575402 | |
| -0.269815 | -0.206133 | 0.193252 | -0.383352 | -1.006606 | |
| 0.053727 | 0.043633 | -0.015822 | -0.619752 | -0.957563 | |
| 0.134098 | 0.056636 | 0.011988 | -0.583612 | -0.757675 | |
| 0.125795 | 0.022357 | 0.046545 | -0.469028 | -0.564468 | |
| 0.099627 | 4.143416e-3 | 0.047715 | -0.354516 | -0.416605 | |
| 0.076494 | 9.458446e-4 | 0.034827 | -0.260994 | -0.308925 | |
| 0.058871 | 1.972175e-3 | 0.023091 | -0.188595 | -0.230324 | |
| 0.045537 | 2.644084e-3 | 0.015818 | -0.132927 | -0.173114 | |
| 0.035239 | 2.999704e-3 | 0.01173 | -0.089886 | -0.13239 | |
| 0.026461 | 3.724759e-3 | 9.842419e-3 | -0.056564 | -0.104465 | |
| 0.016417 | 3.013809e-3 | 0.010058 | -0.03166 | -0.086303 | |
| -5.100463e-4 | -5.295647e-3 | 0.01065 | -0.01629 | -0.075841 | |
| -0.030356 | -0.026497 | 4.170728e-3 | -0.016038 | -0.072649 |
|
| ||
|
| ||
| -0.683168 | -1.105911 | |
| -4.714311 | -1.947149 | |
| -2.443037 | -0.878414 | |
| -0.559008 | -0.169137 | |
| 0.011766 | 3.324338e-3 | |
| 1.880721e-3 | -0.019994 | |
| -0.071931 | -0.047549 | |
| -0.08527 | -0.046727 | |
| -0.064922 | -0.034317 | |
| -0.04315 | -0.023241 | |
| -0.029561 | -0.01623 | |
| -0.022318 | -0.012079 | |
| -0.017532 | -9.730539e-3 | |
| -0.011198 | -8.641283e-3 | |
| -4.790906e-4 | -6.800006e-3 |
Случай.
|
| |||||

| |||||
| 1.5 | |||||
| 1.863665 | -1.529179 | 2.366237 | 2.84 | 0.72 | |
| -5.992367 | -1.349428 | 0.631161 | 5.036809 | -0.621337 | |
| -2.453521 | -0.212276 | -0.277259 | -0.623614 | -2.564197 | |
| 0.799325 | 0.318411 | -0.332155 | -3.046156 | -2.445041 | |
| 1.457799 | 0.276979 | -0.107615 | -2.353022 | -1.429303 | |
| 0.788232 | 0.089476 | 0.03486 | -0.983144 | -0.634763 | |
| 0.151516 | -0.013606 | 0.051799 | -0.226659 | -0.311188 | |
| -0.061327 | -0.024025 | 0.0205 | -0.075958 | -0.247544 | |
| -0.025713 | -3.698787e-3 | -2.68783e-3 | -0.13386 | -0.232444 | |
| 0.040388 | 9.300063e-3 | -7.500846e-3 | -0.160878 | -0.19347 | |
| 0.058238 | 0.010685 | -3.685949e-3 | -0.124671 | -0.14223 | |
| 0.041502 | 7.814105e-3 | 9.426781e-4 | -0.070333 | -0.10141 | |
| 0.0171 | 3.434638e-3 | 4.592589e-3 | -0.031371 | -0.07781 | |
| -6.42921e-3 | -5.309767e-3 | 5.927134e-3 | -0.015394 | -0.067299 | |
| -0.030521 | -0.016636 | 1.922601e-4 | -0.021045 | -0.06438 |
|
| ||

| ||
| -0.769522 | -1.425241 | |
| -4.074031 | -1.594848 | |
| -2.092241 | -0.354487 | |
| -0.028395 | 0.183173 | |
| 0.584274 | 0.177939 | |
| 0.345655 | 0.033112 | |
| 0.033454 | -0.041927 | |
| -0.078179 | -0.040145 | |
| -0.053699 | -0.015611 | |
| -8.176453e-3 | -5.781337e-4 | |
| 0.010717 | 2.155128e-3 | |
| 8.463548e-3 | 5.353241e-5 | |
| 1.976135e-3 | -2.141087e-3 | |
| -5.804217e-4 | -3.505654e-3 | |
| -1.116794e-4 | -2.778321e-3 |
5
Графики
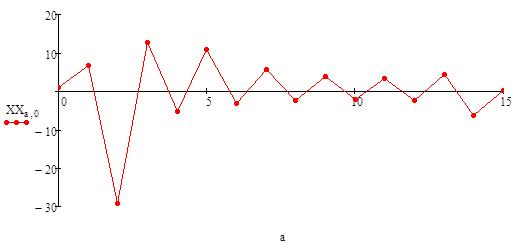
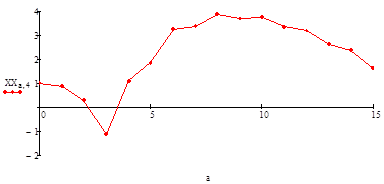
Случай.
Оптимальное управление.
Управление углом  :
:
[  ]
]

Управление креном:
[  ]
]

Фазовые координаты.
Угловая скорость крена:
[  ]
]
Угловая скорость рыскания:
[  ]
]
Угол скольжения:
[  ]
]

Угол крена:
[  ]
]

Угол рыскания:
[  ]
]
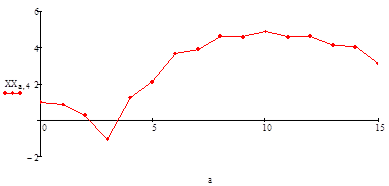
2 случай.
Оптимальное управление.
Управление углом :
[ ]

Управление креном:
[ ]

Фазовые координаты.
Угловая скорость крена:
[ ]

Угловая скорость рыскания:
[ ]

Угол скольжения:
[  ]
]

Угол крена:
[  ]
]

Угол рыскания:
[  ]
]
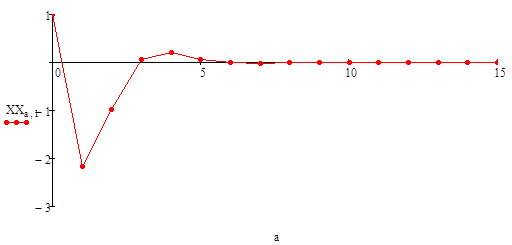
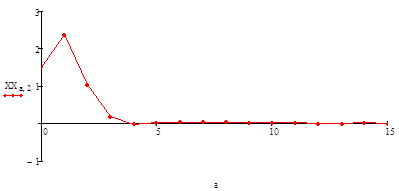
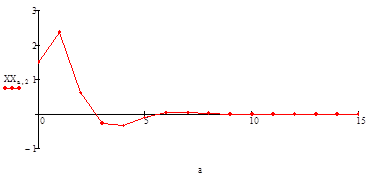
3 случай.
Оптимальное управление.
Управление углом :
[  ]
]

Управление креном:
[  ]
]

Фазовые координаты.
Угловая скорость крена:
[  ]
]

Угловая скорость рыскания:
[  ]
]

Угол скольжения:
[ ]

Угол крена:
[  ]
]

Угол рыскания:
[ ]

4 случай.
Оптимальное управление.
Управление углом  :
:
[ ]

Управление креном:
[ ]

Фазовые координаты.
Угловая скорость крена:
[  ]
]

Угловая скорость рыскания:
[  ]
]

Угол скольжения:
[ ]

Угол крена:
[ ]

Угол рыскания:
[  ]
]

Случай.
Оптимальное управление.
Управление углом :
[  ]
]

Управление креном:
[  ]
]

Фазовые координаты.
Угловая скорость крена:
[  ]
]

Угловая скорость рыскания:
[  ]
]

Угол скольжения:
[ ]
Угол крена:
[  ]
]

Угол рыскания:
[  ]
]

6 случай.
Оптимальное управление.
Управление углом :
[ ]

Управление креном:
[  ]
]

Фазовые координаты.
Угловая скорость крена:
[ ]

Угловая скорость рыскания:
[ ]

Угол скольжения:
[  ]
]
Угол крена:
[  ]
]

Угол рыскания:
[ ]

истребитель управление функционал качество
Выводы
В данной работе проводилось исследование бокового движения высокоманевренного фронтового истребителя. Требовалось найти оптимальное управление, с помощью минимизации функционала качества управления.
При анализе системы, которой описывается движение истребителя, было установлено, что система - полностью управляема по состоянию.
Было рассмотрено 6 различных случаев функционалов качества управления. Исследование параметров задачи привело к следующим результатам:
· Матрица Q накладывает ограничения на поведение фазовых координат в данный момент времени, т.е. учитывает ошибки управления в каждый момент времени. Ее изменение существенно влияет на результаты. Замечена прямая зависимость между значениями элементов матрицы и ограничением на значения фазовых координат. Т.е. с увеличением значений элементов матрицы Q, ошибка управления корректируется больше.
· Матрица R накладывает ограничения на поведение фазовых координат в конечный момент времени. Чем больше значение СЗ матрицы R, тем большие ограничения накладываются на фазовые координаты в конечный момент времени, т.е. происходит большая коррекция ошибки управления в конечный момент времени.
· Матрица K - есть матрица ограничения управления, в данной работе она не изменялась и соответствует возможностям системы управления истребителя.
В силу вышеизложенного стоит отменить, что в случаях 3,4,5,6 - стабилизация полета происходить приблизительно к 10-13 секундам, а в случае 1,2 - даже к 15 секунде не наблюдается стабилизации полета в силу того, что матрица Q - нулевая и ограничения на фазовые координаты - нет, и ошибки управления не учитываются в течение всего времени, кроме конечного момента.
Список использованной литературы
1. Пантелеев А.В. Бортаковский А.С. Теория управления в примерах и задачах.
. Бюшгенс Г.С. Студнев Р.В. Динамика самолета. Пространственное движение.
. Б. Куо. Теория и проектирование цифровых систем управления.
Приложение (текст программы - 1 случай) [Mathcad 14]
Исходные данные.

единичная матрица размера 5х5.

число шагов.






