МЕТОДЫРЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ
Лекция 3
3.1. Особенности ЭПС как объекта регулирования
На рис. 3.1, а, б показаны два характерных режима нагрева, применяемых в печах периодического действия, в наиболее распространенном типе ЭПС. В этих печах осуществляется нагрев полуфабрикатов и изделий под термическую обработку и пластическую деформацию. В обоих случаях требуется осуществить нагрев садки печи до определенной температуры qнагр, выдержки ее в печи заданное технологическим процессом время при этой температуре, поддерживаемой с необходимой точностью, и остывание садки (быстрое при закалке и отпуске, медленное при отжиге и нормализации).
Наиболее распространенный режим нагрева показан на рис. 3.1, а. С начала цикла регулятору задается температура q = qнагр и эта уставка остается неизменной в течение всего цикла, во время нагрева и выдержки. В период нагрева мощность печи остается неизменной, равной номинальной мощности печи, что обеспечивает быстрый рост температуры садки. При этом температура поверхности изделиярастет быстрее, чем в центре изделия. В период выдержки идет выравнивание температур внутри изделий, потребление мощности постепенно падает и к концу выдержки опускается до значения тепловых потерь печи. После завершения периода выдержки печь отключается, остывание нагретой садки обычно
осуществляется вне печи.
Таким образом, регулятор работает фактически лишь во время выдержки, меняя среднее значение Рдр, в период нагрева мощность не регулируется.
На рис. 3.1, б показан так называемый скоростной нагрев, который может быть осуществлен, если печь имеет большой избыток мощности. В этом случае печь вначале включается на полную мощность, обеспечивающую более быстрый по сравнению с описанным ранее режимом нагрев, а затем мощность ее резко снижается, например, переключением ступеней напряжения питающего трансформатора, с тем чтобы не перегреть в период выдержки садку. Для этой цели уставка регулятора снижается сqз до q¢з, во время регулирования мощность снижается, что улучшает качество регулирования.
 Если печь периодического действия многозонная, то обычно во всех зонах уставка заданной температурыqз одинаковая, что обеспечивает к концу выдержки равномерность температуры в объеме садки. Если электропечь непрерывного действия, как правило, многозонная, то в каждой зоне устанавливается своя заданная температура qз, эти температурные уставки остаются все время неизменными при неизменном технологическом процессе.
Если печь периодического действия многозонная, то обычно во всех зонах уставка заданной температурыqз одинаковая, что обеспечивает к концу выдержки равномерность температуры в объеме садки. Если электропечь непрерывного действия, как правило, многозонная, то в каждой зоне устанавливается своя заданная температура qз, эти температурные уставки остаются все время неизменными при неизменном технологическом процессе.
Рис. 3.1. Идеализированные режимы
нагрева в ЭПС периодического действия.
В тех случаях, когда необходимо ограничить скорость нагрева, чтобы снизить температурный градиент в изделиях, могущий привести к появлению в них трещин, а также когда нужно снизить скорость остывания изделий по сравнению с естественной, обусловленной охлаждением их в печи (например, крупные оптические стекла), приходится вводить процесс регулирования в периоды нагрева и остывания и вести его по временной, заданной технологами, программе, т. е. осуществлять программное регулирование.
Требования к точности регулирования температурного режима в ЭПС зависят от проводимого в печи технологического процесса и меняются в широких пределах. Так, при нагреве металлов под пластическую деформацию (ковка, штамповка, прокатка) эти требования невелики—допустимы колебания температуры в пределах ± (25—50) °С; при нагреве под термическую обработку эти требования ужесточаются—допустимы колебания температуры до + (5—10) °С; наконец, при так называемых прецизионных процессах (получение полупроводников, отжиг оптических стекол, получение монокристаллов) требуется поддержание заданной температуры с точностью до ±(0,5—1,0) °С.
Процесс регулирования температуры садки в ЭПС осложняется тем обстоятельством, что непосредственно измерять ее, а следовательно, и регулировать невозможно. Измеряется и регулируется температура печи, а точнее температура рабочего конца термопары, которая является функцией температур нагревателей, футеровки и изделий и поэтому зависит от расположения термопары в печном пространстве. В конвективных печах температура термопары зависит в первую очередь от температуры обдувающего ее потока печной атмосферы.
Процесс управления температурным режимом печи может осуществляться как непрерывными, так и дискретными способами. Непрерывные методы обеспечивают большую точность регулирования температуры, поэтому они применяются пока в основном в печи прецизионного нагрева. Применение этих методов связано с необходимостью постоянно соблюдать соответствие подводимой к печи мощности и ее расхода, а следовательно, необходимы источники питания с плавным регулированием напряжения. Однако для большинства печей благодаря инерционности самой печи и ее загрузки изменения температур в них протекают сравнительно медленно, поэтому соответствие прихода энергии и ее потребления не является обязательным для каждого момента времени, достаточно, если такое соответствие будет иметь место для средних значений мощностей в определенных интервалах времени длительностью (в зависимости от требований процесса) от нескольких минут до нескольких секунд. Это значительно упрощает систему регулирования температуры и позволяет в ряде случаев отказаться от непрерывного регулирования, ограничившись либо простейшим позиционным, либо широтноимпульсным регулированием мощности.
Процесс автоматического регулирования температурного режима в ЭПС характеризуется следующими особенностями.
1. Электрическая печь сопротивления с точки зрения управления представляет собой сложный комплекс, состоящий из нагревателя, футеровки изделия и термоэлектрического термометра, связанных друг с другом процессом теплообмена, причем каждый из них обладает своей тепловой инерцией, что чрезвычайно усложняет расчет тепловых переходных процессов и анализ динамики процесса регулирования.
2. Температуры в отдельных частях камеры ЭПС могут сильно различаться. Поверхности нагревателей, изделия и футеровки имеют различные температуры, кроме того, они нагреваются не всегда равномерно. Более того, температура рабочего конца термопары, а следовательно, и регулируемая температура будут зависеть от его расположения в камере печи. От этого расположения могут зависеть также качество регулирования, устойчивость непрерывного регулирования, размах колебаний температуры при позиционном регулировании.
3. Электрическая печь сопротивления является объектом с самовыравниванием. При повышении температуры увеличиваются ее тепловые потери, поэтому график нагрева носит экспоненциальный характер, в конечном счете в печи само собой устанавливается положение равновесия.
3.2. Непрерывные методы регулирования
Регуляторы пропорционального действия (П - регуляторы).
В этих регуляторах имеется жесткая связь через коэффициент усиления Ку между отклонением температуры ΔТ и приращением подводимой к печи мощности (1.20), (1.21). Меняя коэффициент усиления, можно влиять на характер переходного процесса регулирования возмущения температуры. Отклонения температуры, выраженные в процентах и вызывающие изменение мощности от минимального до максимального ее значения, называются диапазоном пропорциональности регулятора (ДП).

Рис.3.2. Зона пропорциональности Рис.3.3. Влияние коэффициента
усиления на переходный процесс
С увеличением коэффициента усиления диапазон пропорциональности уменьшается (рис. 3.2).
Пропорциональные регуляторы легко настраиваются и работают устойчиво, но лишь тогда, когда потребление мощности печью не меняется. Если же потребление мощности изменяется (нагрев загрузки в садочной печи, изменение скорости перемещения изделий или их свойств в печи непрерывного действия), то регулируемая температура будет поддерживаться с некоторым отклонением от заданного значения. Объясняется это тем, что при наличии жесткой связи между температурой и мощностью регулятор может изменить последнюю лишь за счет отклонения температуры. Это отклонение фактического значения температуры q от заданного значенияq3в установившемся режиме называется абсолютной статической ошибкой Δθ = qзад – θ. Значение ее будет тем больше, чем больше изменилась потребляемая печью мощность.
Отношение абсолютной статической ошибки к заданному значению называют остаточной неравномерностью или статизмом системы 5:
δ = Δθ/θ3
Значение статизма будет тем меньше, чем больше коэффициент усиления регулятора. Чем больше усиление регулятора, тем на меньшее значение он должен изменить температуру печи для приведения в соответствие подводимой мощности с новым значением потребляемой мощности. Однако уменьшение значения статизма путем увеличения коэффициента усиления регулятора ограничено. Из-за инерционности печи и термоэлектрического термометра регулятор получает сигнал о наличии возмущающего воздействия с опозданием, когда это воздействие уже может изменить свое значение и даже знак. При большом усилении регулятора это приведет к колебательному режиму.

Рис. 3.4. Схема работы Рис. 3.5. Схема работы
П-регулятора И-регулятора
На рис. 3.3. показан переходный процесс регулирования после появления (в момент t1) возмущения при различных значениях коэффициента усиления регулятора. Кривая 1 соответствует малому усилению, кривая 2 - большему, а кривая 3 - такому усилению, когда развиваются незатухающие колебания. Чем больше коэффициент усиления, тем меньше первое динамическое отклонение и статизм 5, но тем больше время регулирования или процесс вообще будет незатухающим.
Как уже говорилось, непрерывные методы регулирования целесообразно применять в печах прецизионного нагрева, где недопустимы вызванные позиционным регулированием колебания температуры. Однако регулятор пропорционального действия для таких процессов также малопригоден из-за статизма и значительных колебаний температуры в переходных процессах при изменении потребляемой мощности.
На рис. 3.4 показано действие П-регулятора в процессе регулирования возмущения. Печь работает в режиме, когда ее температура равна θ3, чему соответствует мощность печи P1. Если потребление мощности в момент t1 увеличится (например, через печь пойдут более массивные детали с более высоким коэффициентом теплоемкости), то температура печи, начиная с этого момента начнет падать. В результате этого регулятор будет увеличивать мощность печи Р сверх значения P1, уменьшение температуры начнет замедляться и прекратится в момент t2, когда мощность достигнет значения Р2, а температура станет равной θг. Начиная с этого момента температура печи начнет повышаться, а мощность падать. В результате переходного процесса установится температура θ3, меньшая температурыθ3 на значение абсолютной ошибки Δθ, а мощность печи упадет до Р3, большей P1, но меньшей на значение ΔР мощности, необходимой для получения в печи температурыθ3 при новом повышенном потреблении мощности.
Изменение коэффициента усиления осуществляется при настройке регулятора с помощью пропорционального электронного усилителя.
Регулятор интегрального действия (И-регулятор). У регуляторов интегрального действия в отличие от П-регуляторов нет однозначной зависимости между отклонением регулируемой температуры и мощностью печи, т. е. изменение подводимой к печи мощности осуществляется со скоростью, пропорциональной отклонению температуры от ее заданного значения (1.22), (1.23).
Коэффициент Ку, численно равный скорости изменения мощности при отклонении температуры на 1° С, называется коэффициентом усиления по скорости изменения температуры и является единственным параметром настройки И-регулятора. Закон регулирования (1.22) выполняется до определенного предела и нарушается при достижении выходным сигналом регулятора максимального значения. Интегрирование сигнала рассогласования осуществляется с помощью специальной электронной схемы.
На рис.3.5 показано действие И-регулятора в процессе регулирования возмущения температуры. Пока температура печи равна заданной, напряжение рассогласования отсутствует, в печи выделяется необходимая мощность. Если в момент потребляемая садкой мощность возрастет до P-t (пунктирная линия), то температура начнет снижаться, возникнет напряжение рассогласования и мощность печи будет увеличиваться со скоростью, пропорциональной отклонению температуры. В момент t2 снижение температуры прекратится, однако до момента θ3; знак отклонения температуры сохранится, и регулятор будет продолжать увеличивать мощность печи, хотя и со снижающейся скоростью. По достижении температурой печи заданного значения знак ее отклонения изменится на обратный и мощность печи начнет снижаться. После некоторого переходного процесса наступит новое положение равновесия при заданной температуреθ3 и новом значении мощности Р2, соответствующем ее потреблению в новых условиях. Статическая ошибка регулирования при И-регуляторе не может возникнуть, так как при любом отклонении температуры отθ3 регулятор будет изменять мощность печи, добиваясь ее соответствия с потребляемой. В этом состоит главное преимущество И-регулятора по сравнению с П-регулятором.
Рис. 3.6. Схема работы ПИ-
регулятора температуры
Однако запас устойчивости в системах с И-регулятором значительно меньше по сравнению с запасом устойчивости в системах с П- регулятором, поэтому переходные процессы в электропечах при использовании И-регулятора имеют обычно колебательный характер. Затухание этих колебаний возможно лишь при малых значениях параметра настройкиКу, а при этом значительно увеличивается амплитуда первого динамического отклонения при регулировании.
 Поэтому из-за плохих динамических свойств И-регуляторы практически не применяют для регулирования температуры ЭПС.
Поэтому из-за плохих динамических свойств И-регуляторы практически не применяют для регулирования температуры ЭПС.
Регуляторы пропорционально-интегрального действия (ПИ-регуляторы), называемые также изодромными, совмещают оба рассмотренных выше закона регулирования (1.24), (1.25).
В динамическом отношении ПИ-регулятор подобен системе из двух параллельно включенных регуляторов: пропорционального с коэффициентом усиления Ку и интегрального с коэффициентом усиления по скорости К=К/Т. Здесь Т·Кп/Ки—время изодрома, характеризующее введение в закон регулирования интегрального воздействия. Связь между температурой и мощностью в ПИ-регуляторе является не жесткой, а гибкой, меняющейся во времени в зависимости от рассогласования и его длительности. Пропорционально-интегральный регулятор имеет два параметра настройки К и Ти. При правильной настройке параметров ПИ-регулятор имеет преимущества как П-регулятора, так и И-регулятора.
На рис. 3.6 показан переходный процесс в системе регулирования температуры с ПИ-регулятором.
При мощности печи P1 в ней поддерживается заданная температура θ3.В момент t1 произошло нарушение режима, вызванное увеличением потребляемой мощности до значения Р-г (пунктирная линия). Температура печи начинает при этом снижаться, и пропорциональная часть регулятора изменяет подводимую мощность в соответствии со значением и знаком сигнала рассогласования. Если время изодрома Т=Кп/Кивыбрать примерно равным продолжительности периода t3—t1, то регулятор будет работать вначале как чисто пропорциональный, так как доля интегральной части в подводимой мощности будет незначительной. В промежутке времени от θ1 доθ3 переходный процесс будет проходить как при П-регуляторе, в момент t3 вводимая мощность Р3 будет меньше потребляемой Рг и возникнет неравномерность регулирования Δθ.
В дальнейшем вступит в действие интегральная часть регулятора, подводимая мощность начнет расти, при достижении ею значения Р3 неравномерность регулирования исчезнет и действие интегральной части прекратится. Температура будет вновь поддерживаться точно на заданном уровне. Так как действие интегральной части при правильной настройке регулятора незначительно, то она не внесет существенной колебательности в систему. Однако настройка ПИ-регулятора более трудоемка.
Регуляторы пропорционально-интегрально-дифференциального действия (ПИД-регуляторы), которые называют также изодромными с предварением, осуществляют изменение мощности печи пропорционально отклонению, интегралу и скорости изменения температуры—(1.26), (1.27).
ПИД-регуляторы имеют три параметра настройки—Кп,Ти и Тпр—время предварения, характеризующее степень введения производной в закон регулирования, что, естественно, усложняет их настройку. В динамическом отношении ПИД-регулятор подобен системе из трех параллельно включенных звеньев - пропорционального, интегрирующего и дифференцирующего.
Введение воздействия по производной позволяет регулятору учитывать тенденцию отклонения температуры печи, оценивать значительность возмущающего воздействия до возникновения большого рассогласования и заранее изменять соответствующим образом регулирующее воздействие. Это приводит к уменьшению значения первого динамического отклонения регулируемой температуры, снижению колебательности системы и времени регулирования. Настройка ПИД-регуляторов осуществляется с помощью специальных регулирующих устройств.
Показателями качества рассмотренных регуляторов непрерывного действия являются максимальное динамическое отклонение регулируемой температуры, время регулирования переходного процесса и остаточная неравномерность. Наименьшее динамическое отклонение обеспечивает ПИД-регулятор. Минимальное время регулирования достигается с помощью П- и ПИД-регуляторов, но ПИД-регулятор, кроме того, сводит к нулю статизм системы. Таким образом, для регулирования температурного режима ЭПС прецизионного действия оптимальным является использование ПИД-регулятора, обеспечивающего наивысшее качество регулирования. В тех же случаях, когда процесс нагрева протекает медленно с неизменной мощностью и, следовательно, остаточная неравномерность маловероятна, с успехом может быть использован П-регулятор.
Лекция 4
4.1. Позиционные методы регулирования температуры
В ЭПС часто применяют дискретный метод регулирования в его простейшей форме—двухпозиционной. При таком регулировании в качестве исполнительного устройства используется коммутационная аппаратура (электромагнитный контактор или тиристорный переключатель), обеспечивающая периодическое включение и выключение печи. Включение вызывает рост температуры, так как мощность печи всегда выбирается с запасом, а соответствующая номинальной мощности установившаяся температура значительно превосходит рабочую. При выключении температура печи снижается. При разогреве садки мощность максимальна (номинальная), поэтому температура растет. Когда она достигнет значения θ3 + Δθ (2Δθ - зона нечувствительности регулятора), регулятор сработает, контактор отключит печь и ее мощность упадет до нуля. Температура печи начнет уменьшаться по экспоненциальной кривой до нижней границы зоны нечувствительности θ3 - Δθ. В этот момент произойдет новое включение печи, и ее температура вновь начнет увеличиваться.
Таким образом, процесс регулирования температуры печи по двухпозиционному принципу заключается в ее изменении по “пилообразной” кривой вокруг заданного значения в пределах зоны нечувствительности регулятора. Средняя мощность печи будет при этом зависеть от отношения интервалов времени включенного состояния Dt1 к времени выключенного состояния Dt2. По мере прогрева печи и садки кривая нагрева будет идти все круче, а кривая остывания — все положе, поэтому отношение интервалов Dt1 к Dt2 будет уменьшаться, а следовательно, будет падать и средняя мощность Рср. (рис. 4.1). При двухпозиционном регулировании значение средней мощности печи все время приводится в соответствие с потребляемой, средняя температура печи поддерживается постоянной и равной θ3, регулирование приобретает астатический характер.

Рис. 4.1
Зона нечувствительности современных регуляторов обычно равна + (0,5—1) °С. Однако действительные колебания температуры печи могут быть намного большими, если учитывать динамическое запаздывание в системе регулятор—печь. Такое запаздывание имеется в самом регуляторе, в коммутационной аппаратуре, но основным источником этого запаздывания является инерция термоэлектрического термометра—особенно если он снабжен двумя защитными чехлами—керамическим и металлическим. Влияние этой инерции иллюстрируется графиком на рис. 4.2. На графике сплошная кривая θн— температура нагревателя печи, а пунктирная θm.п —температура спая регулирующей термопары. При включении печи температура нагревателяθн начинает увеличиваться и параллельно начинает расти температура спая термопары. Так как термопара заключена в кожух и между ней и нагревателем имеется тепловое сопротивление, то кривая θm.п отстает от кривойθн на время запаздывания t0. Поэтому, когда температура нагревателя доходит до значения θ3 + Δθ1, отключения печи не происходит и она продолжает нагреваться. Лишь в момент 2, когда верхней границы зоны нечувствительности регулятораθ3 + Δθ1 достигнет температура спая термопары θm.п, произойдет выключение печи. Если регулятор и силовой блок сработают мгновенно, то криваяθн тотчас же начнет падать по экспоненциальной кривой остывания 3-5. Однако температура спая термопары θm.п еще некоторое время будет продолжать увеличиваться, нагрев будет происходить благодаря не успевшим остыть нагревателям.
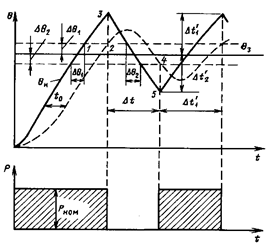
Рис. 4.2 Схема работы двухпозиционного регулятора температуры с учетом динамического запаздывания
Кривая θm.п пересечет кривую θн. В точке 4 температура θm.п достиг
нет нижней границы зоны нечувствительности θ3 – Δθ2, печь включится, и температура нагревателей вновь начнет расти. Однако в момент включения температура нагревателей будет ниже θ3 – Δθ2.
Таким образом, в результате действия динамического запаздывания t0 колебания температуры нагревателей (а следовательно, и печи и термопары) оказываются существенно большими, чем зона нечувствительности регулятора, а время цикла регулирования увеличивается с (Δt1 + Δt2) до (Δt′1 + Δt′2).
Чем больше запаздывание to, тем больше будут колебания температуры θн = Δθ1 + Δθ′2 превышать зону нечувствительности регулятора. Однако амплитуды этих колебаний будут зависеть также от избытка мощности печи (см. зоны I и II на рис. 4.3). При большем избытке мощности печи (зона II) кривая нагрева будет идти круче Δθ1, Δθ2 и зона нечувствительности [(θср + Δθ′′2) - (θср - Δθ′′2)] будет иметь более высокие значения. Одновременно меняется и значение средней температуры регулирования θср. Значение последней совпадает с заданным значением температуры лишь в том случае, если кривые нагрева и остывания в зоне нечувствительности имеют одинаковый наклон, а это имеет место, если предельная

U
Рис. 4.3. Зависимость характера двухпозиционного регулирования от избытка мощности
температура, установившаяся в печи при номинальной ее мощности, будет равна 2θзад. Во всех остальных случаях qср будет отличаться от θзад (рис. 4.2), т. е. появится статическая ошибка в работе регулятора.
Таким образом, при двухпозиционном регулировании в печи возникают периодические колебания температуры, амплитуда которых тем больше, чем больше запаздывание в системе (инерция термоэлектрического термометра) и чем больше избыток мощности (чем меньше потребляемая садкой мощность Р относительно номинальной мощности печи). Кроме того, может появиться постоянная статическая погрешность, значение которой зависит от различия в наклоне кривых нагрева и остывания печи,
Вызванные двухпозиционным регулированием колебания температуры различны по своим амплитудам в отдельных частях печи. Наибольшего значения достигают колебания температуры у нагревателей (практически они безынерционны), меньше они у тонких жаростойких деталей (подовые плиты, детали конвейера), совсем небольшие у массивных нагреваемых изделий и минимальные - на футеровке. При этом колебания резко увеличиваются при переходе от регулирования с безынерционным термопреобразователем к регулированию с инерционным. Для нагревателя колебания увеличились с 55 до 130 – 140 °С, одновременно увеличилось и время цикла регулирования от 1,1до 5,5мин.
Кривые нагрева идут значительно круче, чем кривые остывания, в результате появилась существенная статическая ошибка tcp—ty. Объясняется это большим избытком мощности печи в установившемся состоянии.
В подавляющем большинстве случаев в ЭПС нагреваются металлические, достаточно массивные изделия, для которых двухпозиционное регулирование вполне приемлемо. Более того, в ряде случаев, когда на поверхности нагреваемых изделий появляются температурные колебания относительно большой амплитуды, они не приносят вреда качеству изделий и могут быть допущены. Вот почему позиционное регулирование получило такое широкое распространение в ЭПС. Только когда время нагрева изделий соизмеримо с временем цикла регулирования (скоростной нагрев тонких изделий) или когда даже небольшие колебания температуры на поверхности изделия недопустимы, приходится применять специальные меры по подавлению вызванных двухпозиционным регулированием колебаний температуры на изделиях или переходить на непрерывные методы регулирования.