Назначение: Метод гармонического баланса (гармонической линеаризации) - это один из наиболее распространенных инженерных методов, позволяющий определить наличие предельных циклов и определить их параметры и устойчивость.
Условия применения:
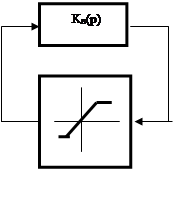
1. Нелинейную систему можно представить, состоящей из двух частей: линейной части -  и нелинейного элемента (рис.1a).
и нелинейного элемента (рис.1a).
2. Нелинейный элемент является безынерционным и имеет центрально-симметричную характеристику (рис.1б).
3. Линейная часть обладает хорошими фильтрующими свойствами в области низких частот (рис.1в).
 |
 |
a) б) в)
Рис.1
Рассмотрим разомкнутую систему (рис.2). На вход нелинейного элемента поступает гармонический сигнал. На выходе нелинейного элемента сигнал уже не гармонический, следовательно, его можно разложить в ряд по гармоническим составляющим.
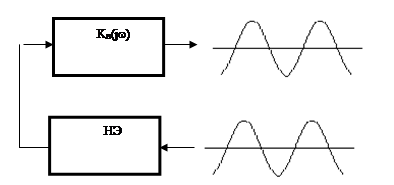 |
Рис.2
В этом разложении будут только нечетные гармоники, так как характеристика нелинейного элемента нечетная. Эти составляющие поступают на вход линейной части, которая обладает хорошими фильтрующими свойствами, т.е. пропускает только первую гармонику, все остальные будут сильно подавлены. Таким образом, на выходе линейной части получен тот же гармонический сигнал, что и на входе нелинейного элемента. Будем считать, что линейная часть является идеальным фильтром, при этом всю систему, в определенном смысле, можно рассматривать как линейную, и применять методы теории линейных систем, например, критерий Найквиста. Определение устойчивости предельных циклов методом гармонического баланса. Пусть задана система, состоящая из линейной части с АФХ - К (jw) и некоторого безынерционного звена с коэффициентом усиления - к ( рис.3а). При этом
 . (1)
. (1)
Если АФХ разомкнутой линейной системы проходит через критическую точку (- 1, j0), то замкнутая система находится на границе устойчивости (рис.3б). При этом в соответствии с (1) 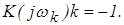
 |
|
Рис.3
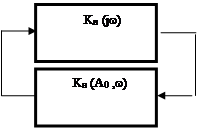
Если система состоит из линейной части и нелинейного звена, то условия возникновения колебаний выглядят следующим образом (рис.4а)
 (2)
(2)
Это условия называется условием гармонического баланса, т.е. выполняются условия: баланса амплитуд; баланса фаз.
 (3)
(3)
Т. е. в точках пересечения К (jw) и  выполняются условия баланса, при этом в системе возникают автоколебания (предельные циклы). В отличии от линейных систем, они могут быть устойчивыми и не устойчивыми. Количество точек пересечения определяет количество предельных циклов, а значения амплитуды A 0i и частоты w0i в точках пересечения определяет параметры автоколебаний (рис.4б).
выполняются условия баланса, при этом в системе возникают автоколебания (предельные циклы). В отличии от линейных систем, они могут быть устойчивыми и не устойчивыми. Количество точек пересечения определяет количество предельных циклов, а значения амплитуды A 0i и частоты w0i в точках пересечения определяет параметры автоколебаний (рис.4б).
а)
Рис.4
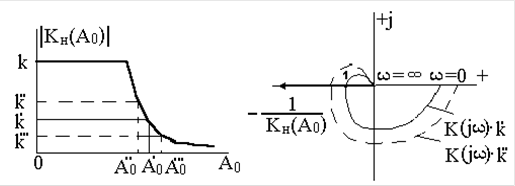
Пример 1. Для заданной системы (рис.5) определить наличие автоколебаний и определить их устойчивость.
 |
 |
б) в)
Рис.5
Так как характеристики пересекаются, то в этой системе возможны автоколебания, т.е. выполняются условия гармонического баланса. Эту систему можно представить в виде некоторой линейной (Рис.6).
Это возможно, если амплитуда равна  При этом АФХ будет проходить через точку - 1. Если уменьшить амплитуду, т.е.
При этом АФХ будет проходить через точку - 1. Если уменьшить амплитуду, т.е.  , то к увеличится. Характеристика охватывает точку "-1", система не устойчива.
, то к увеличится. Характеристика охватывает точку "-1", система не устойчива.
 |
|
а)
б) в)
Рис.6
При увеличении амплитуды ( ) к уменьшается. АФХ не будет охватывать точку "-1", амплитуда колебаний убывает, система станет устойчивой. Следовательно, автоколебания, в точке "-1" будут устойчивыми.
) к уменьшается. АФХ не будет охватывать точку "-1", амплитуда колебаний убывает, система станет устойчивой. Следовательно, автоколебания, в точке "-1" будут устойчивыми.
Пример 2. Для заданной системы (рис.7) определить наличие автоколебаний и определить их устойчивость.
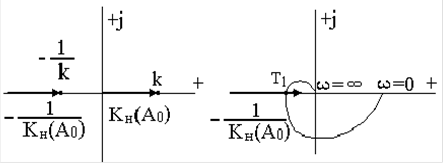
Рис.7
Рассмотрим линейную модель системы (рис.8).
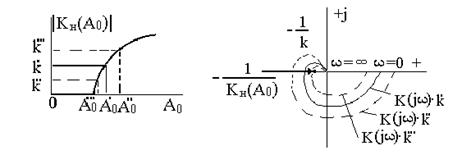
Рис.8
При увеличении амплитуды входного сигнала  колебания возрастают, следовательно, цикл неустойчивый.
колебания возрастают, следовательно, цикл неустойчивый.
Выводы:
1. Для определения возможности существования предельных циклов находят точки пересечения характеристик К (jw) и  .
.
2. Предельный цикл будет устойчивым, если изображающая точка на характеристике  при увеличении не охватывается АФХ.
при увеличении не охватывается АФХ.
3. Предельный цикл будет неустойчивым, если изображающая точка на характеристике при увеличении охватывается АФХ.
Пример 3. Для заданной системы (рис.9) определить наличие автоколебаний и определить их параметры и устойчивость при заданных параметрах системы: T = 0,1 c; k = 10 c-1; b =p /4.
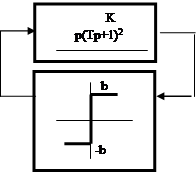 |
z x
 Рис. 9
Рис. 9
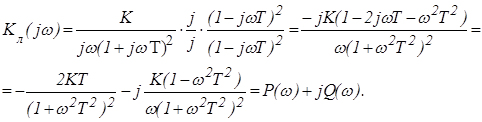
Решение: Определим выражение для АФХ линейной части

Определим частоту предельного цикла  из условия
из условия

Определим
 .
.
Условия гармонического баланса:

где  - амплитуда предельного цикла.
- амплитуда предельного цикла.
Периодическое решение устойчиво. 
Устойчивость предельного цикла можно определить из условия:

Пример 4. Для заданной системы (рис.10) определить наличие автоколебаний и определить их устойчивость.
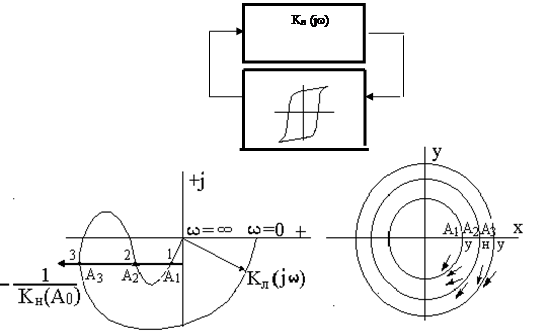 |
Рис.10 (а, б, в)
В этой системе могут существовать колебания трех различных амплитуд и частот. В точке 3 самая маленькая амплитуда и самая большая частота.
Пример Для заданной системы (рис.11) определить наличие авто-колебаний и определить их устойчивость и параметры, если заданы значения Т = 0,05 с; К = 2 c-1; а = 0,33; b = 50.
 |
Рис. 11
Решение: Определим выражение для АФХ линейной части
АФХ исследуемой системы имеет вид (рис.12)
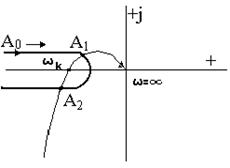 |
Рис.12
Определим значение вещественной частотной характеристики при критической частоте
|

Эквивалентный комплексный коэффициент передачи не
линейного элемента -  имеет только действительную часть, так как нелиней-ность однозначная.
имеет только действительную часть, так как нелиней-ность однозначная.

Условие гармонического баланса:

Периодические решения:

Первое решение не устойчиво, поэтому в системе возникают установившиеся автоколебания:  .
.
Пример.
Для заданной системы (рис.11) определить наличие автоколебаний и определить их устойчивость.
Решение приведено на рис 13. В этой системе могут существовать колебания четырех различных амплитуд и частот.
 |
Рис.13
Если первый цикл устойчивый, система называется системой с мягким возбуждением. Если первый цикл не устойчивый, система называется системой с жестким возбуждением. Всегда имеет место чередование циклов.
Литература
1. Грумондз В.Т. Динамика нелинейных систем: Некоторые задачи устойчивости и колебаний - 2-е изд. Вуз. книга, 2009. - 182c.
2. Мирошник И.В. Теория автоматического управления: Нелинейные и оптимальные системы. Издательство: ПИТЕР, 2006. - 272c.
3. Сборник задач по теории автоматического регулирования и управления / Под редакцией В.А. Бесекерского. - M.: Наука, 1978.