ЛЕКЦИЯ 4
МЕХАНИЧЕСКИЕ КОЛЕБАНИЯ.
1.Свободные гармонические колебания без трения.
2.Затухающие гармонические колебания
3. Вынужденные колебания. Резонанс.
4. Математический и физический маятники.
5. Сложение колебаний.
 Свободные гармонические колебания без трения.
Свободные гармонические колебания без трения.
а) Уравнение гармонических колебаний.
Рассмотрим механическую систему с одной степенью свободы, т.е. положение этой системы можно задать с помощью одной величины х.
Это может быть угол, отсчитываемый от некоторой плоскости, или расстояние вдоль некоторой заданной линии.
Потенциальная энергия такой системы будет функцией одной переменной:
 .
.
Условимся отсчитывать  и
и  от одного положения системы – положения устойчивого равновесия, в котором
от одного положения системы – положения устойчивого равновесия, в котором  имеет минимальное значение. Будем также считать, что при
имеет минимальное значение. Будем также считать, что при  также
также 
Разложим функцию  в ряд по степеням х; причем ограничимся рассмотрением малых степеней х, высшими степенями будем пренебрегать.
в ряд по степеням х; причем ограничимся рассмотрением малых степеней х, высшими степенями будем пренебрегать.
По формуле Маклорена:
 .
.
Так как при х =0 система имеет минимальную энергию, следовательно, первая производная  , а вторая производная
, а вторая производная  , кроме того ранее условились, что . Обозначим
, кроме того ранее условились, что . Обозначим  и получим:
и получим:

Зная как связаны между собой потенциальная энергия и сила, запишем:

Коэффициент пропорциональности  является аналогом коэффициента упругости (коэффициент жесткости) определяется свойствами самой колебательной системы.
является аналогом коэффициента упругости (коэффициент жесткости) определяется свойствами самой колебательной системы.
Это выражение тождественно закону Гука для упругой силы.
Отсюда можно сделать вывод: движение выбранной нами колебательной системы будет определяться квазиупругой силой.
Эта сила направлена к положению равновесия, на что указывает знак минус, поэтому её часто называют возвращающей или восстанавливающей силой.
Гармоническими называются колебания, которые возникают под действием возвращающей силы, величина который пропорциональной смещению.
Поскольку гармонические колебания возникают в механической системе под действием упругих или квазиупругих сил, то динамическое уравнение, составленное по 2-ому закону Ньютона, имеет вид:
 , где
, где
 масса колебательной системы;
масса колебательной системы;  её ускорение;
её ускорение;
- коэффициент упругости;  смещение системы от положения равновесия.
смещение системы от положения равновесия.
 или
или  ,
,
где  - циклическая частота гармонических колебаний или частота собственных колебаний системы.
- циклическая частота гармонических колебаний или частота собственных колебаний системы.
Полученное уравнение является линейным, однородным дифференциальным уравнением второго порядка.
Собственными или свободными называются колебания системы, выведенной из положения равновесия и предоставленной самой себе.
б ) Решение уравнения свободных гармонических колебаний.
Вид функции, являющейся решением данного дифференциального уравнения, определим из следующих соображений: мы получили что
 .
.
Т.е. вторая производная функции, являющейся решением этого дифференциального уравнения, должна быть равна самой себе, умноженной на некоторый коэффициент. Таким свойством обладают функции sin и cos:

 .
.
Следовательно, решение этого дифференциального уравнения можно записать в виде:
 ,
,
где  некоторые константы.
некоторые константы.
Подставив эту функцию в полученное дифференциальное уравнение, получим, что она удовлетворяет нашему уравнению при любых t, если
 .
.
Произвольно выбранные константы  и
и  определяются начальными условиями.
определяются начальными условиями.
Общий вид решения можно получить, если ввести обозначения:
 ;
; 
Величина  называется начальной фазой, которая показывает отставание или опережение, с которым достигается максимальное смещение А, по отношению к начальному моменту времени.
называется начальной фазой, которая показывает отставание или опережение, с которым достигается максимальное смещение А, по отношению к начальному моменту времени.
Тогда 

где А- максимальное смещение колеблющейся системы от положения равновесия или амплитуда колебаний.

|
Функции, определяющие законы изменения скорости и ускорения при колебательном процессе, можно получить, продифференцировав общее решение по времени:


в) Полная и кинетическая энергия колебательной системы.
Полная механическая энергия колебательной системы является суммой ее кинетической и потенциальной энергий и является величиной постоянной:
 = const
= const
Подставив функции, определяющие  и
и  , получим:
, получим:
 .
.
Учитывая, что  , можно записать:
, можно записать:


|
Получили, что полная механическая энергия колебательной системы пропорциональна квадрату амплитуды.
 Затухающие гармонические колебания
Затухающие гармонические колебания
а) Уравнение затухающих колебаний.
В реальных колебательных системах всегда есть силы сопротивления. На совершение работы против этих сил уходит часть механической энергии системы, в результате полная механическая энергия системы уменьшается.
Будем рассматривать малые колебания, поскольку только их можно считать гармоническими. В этом случае сила сопротивления пропорциональна скорости, т.е.  , где
, где  коэффициент сопротивления.
коэффициент сопротивления.
Знак (-) означает, что сила сопротивления и скорость колебаний всегда направлены в противоположные стороны.
Уравнение движения при наличии сил сопротивления имеет вид:

 .
.
Обозначим:  и
и  .
.

Получили линейное, однородное дифференциальное уравнение 2-го порядка, которое описывает затухающие колебания.
б) Решение уравнения затухающих колебаний
Решение данного дифференциального уравнения будем искать в виде:

Множитель перед косинусом определяет уменьшение амплитуды со временем.
Проверим, при каких условиях эта функция будет являться решением полученного уравнения.
 ;
;

Подставив полученные выражения в уравнение затухающих колебаний, получим:

Левая часть полученного выражения должно обращаться в ноль при любых t,
что возможно если: 
Следовательно  ;
; 
Из последнего выражения видно, что частота затухающих колебаний  всегда меньше частоты собственных колебаний
всегда меньше частоты собственных колебаний  .
.
Скорость затухания колебаний определяется величиной  , которую называют коэффициентом затухания.
, которую называют коэффициентом затухания.
Логарифмическим декрементом затухания называют величину равную натуральному логарифму двух соседних амплитуд:
 =
=  ,
,
где  и
и  соседние амплитуды,
соседние амплитуды,  - период колебаний.
- период колебаний.
Закон убывания амплитуды можно записать:
 ,
,
где  - максимальное значение амплитуды.
- максимальное значение амплитуды.
Найдем время  , за которое амплитуда уменьшается в e раз:
, за которое амплитуда уменьшается в e раз:
По определению  , т.е.
, т.е.  , или
, или  .
.
Получили, что коэффициент затухания обратно пропорционален промежутку времени, за который амплитуда уменьшилась в е раз.
Для характеристики свойств колебательной системы используется величина, которая называется добротность: 
Добротность пропорциональна числу колебаний за время  , в течение которых амплитуда колебаний уменьшается в е раз.
, в течение которых амплитуда колебаний уменьшается в е раз.
Вообще-то добротность характеризует систему с энергетической точки зрения:  ,
,
где: Е – полная механическая энергия системы в начальный момент времени;
W - энергия рассеянная за один период
Очевидно, что чем меньше энергии рассеивается, тем выше добротность системы. В идеальном случае (нет сил сопротивления) она равна  .
.
 Вынужденные колебания. Резонанс.
Вынужденные колебания. Резонанс.
а) Вынужденные колебания
Вынужденными называются колебания, которые совершаются под действием внешней периодически изменяющейся силы. 
Уравнение, которое описывает такие колебания, имеет вид:




где  коэффициент затухания;
коэффициент затухания;
 частота собственных колебаний системы;
частота собственных колебаний системы;

 максимальное значение вынуждающей силы;
максимальное значение вынуждающей силы;
 частота вынуждающей силы.
частота вынуждающей силы.
Это уравнение является неоднородным дифференциальным уравнением 2-го порядка, решение которого будем искать как сумму общего решения однородного дифференциального уравнения  и частного решения неоднородного уравнения
и частного решения неоднородного уравнения  :
:  .
.
Общее решение однородного дифференциального уравнения представляет собой решение уравнения затухающих колебаний и имеет вид:
 .
.
Частное решение неоднородного уравнения будем искать в виде:
 .
.
В большинстве случаев 1-ое слагаемое  можно не учитывать, так как оно достаточно быстро обращается в ноль и играет некоторую роль лишь в начальный период становления колебательного процесса.
можно не учитывать, так как оно достаточно быстро обращается в ноль и играет некоторую роль лишь в начальный период становления колебательного процесса.
Следовательно: 
Для получений выражений, определяющих амплитуду и начальную фазу результирующего колебания, воспользуемся методом векторных диаграмм.
Для этого в каждое слагаемое уравнение вынужденных колебаний  подставим функцию, определяющую х.
подставим функцию, определяющую х.
Проводя соответствующие математические операции, получим:


|
Каждое из полученных соотношений представим как вектор с максимальным значением, равным множителю перед косинусом.
Вектор  направим вдоль оси OX, вектор
направим вдоль оси OX, вектор  опережает его на
опережает его на  и пойдет вдоль оси OY, вектор
и пойдет вдоль оси OY, вектор  опережает на
опережает на  , следовательно, пойдет вдоль отрицательной части оси OX. Сложив графически эти вектора, получим направление и величину
, следовательно, пойдет вдоль отрицательной части оси OX. Сложив графически эти вектора, получим направление и величину  .
.
 ;
;  .
.
Полученное выражение для амплитуды вынужденных колебание показывает, что ее величина существенно зависит от разности между частотой собственных колебаний системы и частотой вынуждающей силы.
Все это приводит к тому, что при некоторой частоте, зависящей от параметров колебательной системы, амплитуда достигает своего максимального значения.
б) Резонанс
Резонансом называется резкое возрастание амплитуды колебаний системы при совпадении частоты собственных колебаний  с частотой вынуждающей силы
с частотой вынуждающей силы  .
.
Что бы найти резонансную частоту, нужно исследовать на экстремум функцию, определяющую закон изменение амплитуды:
 .
. 
Взяв первую производную по частоте  от этой функции, а точнее от ее знаменателя, и, приравняв ее к нулю, получим:
от этой функции, а точнее от ее знаменателя, и, приравняв ее к нулю, получим:

Это уравнение третьей степени имеет три корня:
1-вый корень -  =0. В этом случае знаменатель в будет максимальным, следовательно, амплитуда будет минимальной.
=0. В этом случае знаменатель в будет максимальным, следовательно, амплитуда будет минимальной.
2-ой и 3- ий корни 
При  - задача не имеет физического смысла;
- задача не имеет физического смысла;
при  - амплитуда колебаний будет максимальна.
- амплитуда колебаний будет максимальна.
Таким образам, резонансная частота определяется соотношением:

Подставив эту частоту в , получим выражение для максимальной амплитуды при резонансе: 

|
Как видно, существенная роль при определении максимальной амплитуды принадлежит коэффициенту затухания.
При  амплитуда стремится к бесконечности.
амплитуда стремится к бесконечности.
 - начальное отклонение от положения равновесия. Чем больше
- начальное отклонение от положения равновесия. Чем больше  , тем меньше
, тем меньше  , тем сильнее резонансная частота отличается от частоты собственных колебаний
, тем сильнее резонансная частота отличается от частоты собственных колебаний  .
.
 Математический и физический маятники.
Математический и физический маятники.
а) Математический маятник.
Математическим маятником называется идеализированная система, состоящая из длинной, невесомой и нерастяжимой нити, один конец которой закреплен, а к другому подвешена материальная точка.
Движение математического маятника, отклоненного на небольшой угол, представляет собой простое гармоническое колебание. Материальная точка (груз, размеры которого много меньше длины нити) двигается по дуге окружности в идеальном случае с одинаковой амплитудой в обе стороны от положения равновесия и проходит нижнюю точку с максимальной скоростью.
Проверим, насколько верна пропорциональность между смещением маятника и возвращающей силой.

|
Смещение маятника от положения равновесия определяется длиной дуги  , которая равна:
, которая равна:  , где
, где  угол отклонения маятника от вертикальной оси.
угол отклонения маятника от вертикальной оси.
Роль возвращающей силы играет составляющая силы тяжести, вектор которой направлен по касательной к траектории движения материальной точки  .
.
В общем случае колебания математического маятника нельзя считать гармоническими, так как возвращающая сила пропорциональна синусу, а не x или  .
.
В случае математического маятника данная пропорциональность будет соблюдаться, если угол отклонения не будет превышать 10-12 градусов, поскольку в этом случае значения  и
и  , выраженного в радианах будут равны между собой.
, выраженного в радианах будут равны между собой.

Получим дифференциальное уравнение, описывающее гармонические колебания математического маятника:
 ;
;  ,
,
Обозначив  , получим уравнение простого гармонического колебания:
, получим уравнение простого гармонического колебания:  .
.
Поскольку циклическая частота равна  , где Т – период колебаний, то период колебаний математического маятника будет равен:
, где Т – период колебаний, то период колебаний математического маятника будет равен:
Из полученной формулы следует, что период колебаний математического маятника не зависит от его массы. Кроме того, по наблюдениям Галилея, период гармонических колебаний этого маятника в первом приближении не зависит от амплитуды колебаний.
б) Физический маятник.
Физическим маятником называется физическая абстракция, представляющая абсолютно твердое тело способное совершать колебания вокруг неподвижной оси, не проходящей через центр инерции данного тела.

|
Колебания физического маятника удобно изучать с помощью уравнений динамики вращательного движения.
При отклонении такого маятника от положения равновесия на угол  возникает вращательный момент, стремящийся вернуть маятник в положение равновесия и который равен:
возникает вращательный момент, стремящийся вернуть маятник в положение равновесия и который равен:  , где
, где  - масса физического маятника;
- масса физического маятника;  - расстояние от точки подвеса до центра инерции тела.
- расстояние от точки подвеса до центра инерции тела.
 ,
,
где I – момент инерции тела.
В случае малых углов отклонения это уравнение примет вид:
 ,
,
где  - частота собственных колебаний физического маятника.
- частота собственных колебаний физического маятника.
Соответственно, период колебаний физического маятника равен:
 .
.
Назовем приведенной длиной физического маятника длину такого математического маятника, период колебаний которого равен периоду колебаний данного физического маятника.

 Сложение колебаний
Сложение колебаний
а) Сложение однонаправленных колебаний.
Пусть материальная точка участвует в двух гармонических колебаниях с одинаковой частотой, происходящих вдоль оси ОХ.
Уравнения этих колебаний имеют вид:
Для наглядности воспользуемся графическим методом сложения колебаний (методом векторных диаграмм). 

|
Представим оба колебания в виде вращения двух векторов  и
и  , модули которых равны соответствующим амплитудам, а начальное положение определяется начальными фазами
, модули которых равны соответствующим амплитудам, а начальное положение определяется начальными фазами  и
и  .
.
Проекция результирующего вектора  на ось ОХ, как видно из чертежа, равна:
на ось ОХ, как видно из чертежа, равна: 
Амплитуду (модуль) вектора найдем по теореме косинусов:
 .
.
Тангенс угла наклона вектора  , определяющий начальную фазу результирующего колебания, как видно из чертежа, равен:
, определяющий начальную фазу результирующего колебания, как видно из чертежа, равен:
 .
.
Получили что;
результирующее колебание представляет собой гармоническое колебание с амплитудой  , частотой
, частотой  и начальной фазой
и начальной фазой  и описывается уравнением:
и описывается уравнением:  .
.
Если складываются однонаправленные колебания с различной частотой, то векторы  и
и  будут вращаться с различной скоростью и результирующий вектор и его скорость вращения в процессе колебания будут меняться по величине, т.е. пульсировать. Результирующее колебание в этом случае не будет гармоническим.
будут вращаться с различной скоростью и результирующий вектор и его скорость вращения в процессе колебания будут меняться по величине, т.е. пульсировать. Результирующее колебание в этом случае не будет гармоническим.
б) Биения
Особый интерес представляет случай, когда складываются два гармонических колебания мало отличающихся по частоте  . Результирующее колебание, возникающее в этом случае, называют биением.
. Результирующее колебание, возникающее в этом случае, называют биением.
Пусть складываемые колебания, описываются следующими уравнениями:

Амплитуды этих колебаний одинаковы, а начальные фазы равны нулю.
В результате сложения получим:
 .
.
Воспользуемся тригонометрической формулой разложения суммы косинусов и будем пренебрегать слагаемым с  , поскольку оно мало, по сравнению со слагаемыми, имеющими множитель
, поскольку оно мало, по сравнению со слагаемыми, имеющими множитель 
 :
:


|
Множитель, заключенный в скобках, изменяется гораздо медленнее, чем 
 , так как по условию
, так как по условию  .
.
За одно и то же время множитель 
 совершит несколько полных колебаний, а множитель
совершит несколько полных колебаний, а множитель  практически не изменится. Все это позволяет биение представить как гармоническое колебание с изменяющейся по гармоническому закону амплитудой.
практически не изменится. Все это позволяет биение представить как гармоническое колебание с изменяющейся по гармоническому закону амплитудой.
в) Сложение взаимно перпендикулярных колебаний.
Рассмотрим систему, обладающую двумя степенями свободы; т.е. система может совершать колебательные движения в двух взаимно перпендикулярных плоскостях с одинаковой частотой.
Пусть эти колебания описываются следующими уравнениями:

Найдем уравнение, которым описывается траектория результирующего колебания.
Из первого уравнения:  ,
,
Из второго уравнения  .
.
Разложим косинус суммы  .
.
 .
.
Тогда  ;
;

|



Получили уравнение эллипса.
Исследуем форму траектории:
1) пусть  , тогда
, тогда 


 - это прямая линия, проходящая через начало системы координат
- это прямая линия, проходящая через начало системы координат
2) 


 тоже прямая линия.
тоже прямая линия.
3) 
 - уравнение эллипса.
- уравнение эллипса.
При  - уравнение окружности.
- уравнение окружности.

|
4)Если частоты взаимно перпендикулярных колебаний отличаются на малую величину  , то их можно рассматривать как колебания с одинаковой частотой, но медленно меняющейся разностью фаз. Результирующее колебание в этом случае будет происходить по медленно видоизменяющейся траектории, которая последовательно принимает форму, отвечающую всем значениям от
, то их можно рассматривать как колебания с одинаковой частотой, но медленно меняющейся разностью фаз. Результирующее колебание в этом случае будет происходить по медленно видоизменяющейся траектории, которая последовательно принимает форму, отвечающую всем значениям от  до
до  .
.
5) Если частоты складываемых взаимно перпендикулярных колебаний не равны между собой, то колебания будут происходить по сложной траектории, называемой фигурой Лиссажу. Форма таких фигур зависит от соотношения частот и амплитуд складываемых колебаний.
ЛЕКЦИЯ 5
МЕХАНИЧЕСКИЕ ВОЛНЫ.
1. Волновой процесс и его характеристики
2. Уравнение бегущей волны
3. Скорость распространения упругих волн
4. Энергия упругой волны
5. Стоячие волны
 Волновой процесс и его характеристики.
Волновой процесс и его характеристики.
Источником волн любой природы (механические, электромагнитные и т.д.) являются колебания.
Процесс распространения колебаний в пространстве называется волновым процессом или просто волной.
Для характеристики волнового процесса используются все физические величины, которые ранее использовали для описания колебаний: амплитуда, частота, период, фаза и т далее.
К новым физическим параметрам, которые вводятся для описания волнового процесса, относятся:
- длина волны - это расстояние между двумя точками пространства, колеблющимися в одной фазе;
- скорость распространения волны - это скорость, с которой перемещается в пространстве гребень (максимум или минимум) волны.
 ,
,
где  - длина волны; Т – время, за которое через выбранную площадку, перпендикулярную направлению распространения волны, проходит два соседних гребня (max).
- длина волны; Т – время, за которое через выбранную площадку, перпендикулярную направлению распространения волны, проходит два соседних гребня (max).
Механическая волна может распространяться только в среде и на большие расстояния, но при этом не происходит переноса вещества, частицы которого колеблются в ограниченном объёме пространства.
При любом волновом процессе происходит перенос энергии и нет переноса вещества.
По типу колебаний частиц среды, в которой распространяются механические волны, различают два вида волн:
продольные волны - это волны, вызывающие колебания частиц среды, совпадающие с направлением распространения волны.
поперечные волны - это волны, направление колебаний частиц среды при их распространении перпендикулярно направлению распространения волны.
Для распространения поперечных волн необходимо, что бы среда обладала модулем сдвига. Продольные волны могут распространяться в любой упругой среде.
Назовем фронт ом волны геометрическое место точек, до которых доходят колебания к моменту наблюдения.
Геометрическое место точек, колеблющихся в одинаковой фазе, называют волновой поверхностью.
Любой фронт волны одновременно является и волновой поверхностью.
 Уравнение бегущей волны.
Уравнение бегущей волны.
Уравнением волны называется функция, которая определяет смещение колеблющейся точки, как функцию координат и времени.

Эта функция должна быть периодична относительно координат и времени.
Найдём вид функции  в случае плоской волны (фронт такой волны является плоскостью), предполагая, что колебания частиц среды являются гармоническими.
в случае плоской волны (фронт такой волны является плоскостью), предполагая, что колебания частиц среды являются гармоническими.
Для упрощения задачи направим оси координат так, чтобы ось OX совпадала с направлением скорости распространения волны. В этом случае волновые поверхности будут перпендикулярны оси OX и смещение частиц будет зависеть только от координаты х и времени t.
 .
.
Пусть колебания точек, лежащих в плоскости  , описываются функцией:
, описываются функцией:
 .
.
Найдем вид этой функции в плоскости колебаний частиц, соответствующей произвольному х.
Время  , за которое волна пройдет расстояние х равно:
, за которое волна пройдет расстояние х равно:
 .
.
Следовательно, колебания частиц в плоскости х будут отставать от колебаний частиц в плоскости х = 0 на время  .
.
 .
.
|
При выводе данного уравнения мы полагали, что амплитуда волны всегда одинакова, т.е. среда энергию волны не поглощает.
Введём волновое число  , которое равно:
, которое равно: 
Учитывая, что  , получим:
, получим:  .
.
Так как,  , можно записать:
, можно записать: 
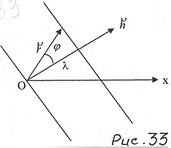
Если же плоская волна распространяется в произвольном направлении (рис.33,2), тогда уравнение будет иметь вид:  ,
,
где  - расстояние от источника волн до волновой поверхности в данный момент времени.
- расстояние от источника волн до волновой поверхности в данный момент времени.
Выразим  через радиус-вектор
через радиус-вектор  , соединяющий начальную точку с произвольной точкой на выбранной волновой поверхности.
, соединяющий начальную точку с произвольной точкой на выбранной волновой поверхности.
 .
.
Тогда  или
или 
Волновой вектор направлен по нормали к волновой поверхности, а его модуль равен волновому числу:  .
.

Полученная функция является решением дифференциального уравнения, которое называется волновым.
Чтобы найти вид этого уравнения возьмём вторые производные от  по координатам и времени:
по координатам и времени:


Сложив последние три уравнения, получим:

Из первого уравнения выразим :  .
.
Окончательно получим: 


Поскольку  , то окончательно волновое уравнение будет иметь вид:
, то окончательно волновое уравнение будет иметь вид: 

 Скорость распространения упругих волн.
Скорость распространения упругих волн.
Пусть по оси ОХ распространяется плоская продольная волна. Выберем в среде цилиндрический объём, площадь основания которого S и высота  .
.
Если основание цилиндра с координатой х будет иметь смещение  , то смещение сечения с координатой
, то смещение сечения с координатой  будет
будет  . Следовательно, рассматриваемый объём получил удлинение
. Следовательно, рассматриваемый объём получил удлинение  (если
(если  <0, то сжатие).
<0, то сжатие).
Величина  даст среднюю деформацию цилиндра. Истинная деформация в разных сечениях будет неодинаковой.
даст среднюю деформацию цилиндра. Истинная деформация в разных сечениях будет неодинаковой.
Поэтому  .
.
Существование деформации свидетельствует о наличии нормального напряжения, которое при малых деформациях пропорционально величине деформации: 
где Е – модуль Юнга.
Рассмотрев движение, выбранного цилиндрического объема, и составив уравнение его движения, можно получить:
 ,
,
где  - плотность недеформированн
- плотность недеформированн