Здачи
1.Выполнить синтез замкнутого контура регулирования тока якоря двигателя постоянного тока СУИМ с настройкой на технический оптимум при следующих параметрах силового преобразователя и якорной цепи: K тп = 50 (о.е.), R э = 1 Ом,
L э = 0,02 Гн, K т = 0,4 Ом,  0,01 с.
0,01 с.
2. Рассчитать параметры аналогового ПИ регулятора тока якоря СУИМ (K рт и T и) при следующих параметрах элементов в обвязке операционного усилителя: R зт = 200 кОм, R от = 20 кОм, Cот = 1 мкФ.
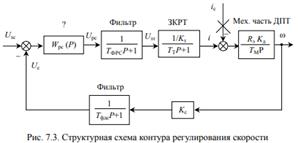
3. Выполнить синтез замкнутого контура регулирования скорости СУИМ с настройкой на технический оптимум при следующих параметрах электромеханического объекта: T м = 0,1 с, K т = 0,4 Ом, R э = 1 Ом, K д = 0,5 (В∙с)-1, K с = 0,05 В∙с,  0,02 с.
0,02 с.
4. Рассчитать параметры аналогового ПИ регулятора скорости СУИМ (K рс и T из) при следующих параметрах элементов в обвязке операционного усилителя: R зс = 10 кОм, R ос = 100 кОм, Cос = 1 мкФ.
5. Рассчитать величину статической ошибки регулирования скорости СУИМ (рад/с) при номинальной статической нагрузке на валу привода 50 Н∙м в однократно интегрирующей системе при следующих параметрах электромеханического объекта:  2 кг∙ м2, 0,02 с.
2 кг∙ м2, 0,02 с.
6. Выполнить синтез замкнутого контура регулирования положения СУИМ для режима малых отклонений координат при следующих параметрах электромеханического объекта:  1 (о.е.), K п = 0,5 В/рад, K с = 0,05 В∙с,
1 (о.е.), K п = 0,5 В/рад, K с = 0,05 В∙с,  0,05 с.
0,05 с.
7. Рассчитать добротности следящей СУИМ по скорости и моменту нагрузки при следующих данных: постоянная «заводка» по скорости w з = 10 рад/с, установившаяся ошибка слежения Dj уст = 0,1 рад, момент нагрузки на валу двигателя M c = 50 Н∙м.
8. Привести выражение дискретной передаточной функции ПИ регулятора скорости СУИМ при следующих параметрах эквивалентного аналогового регулятора: коэффициент пропорциональности K п = 10 (о.е.), постоянная времени интегрирования T и = 0,1 с. Период дискретного управления принять равным T = 0,01 с. При дискретизации регулятора применить метод прямоугольников.
9. Привести выражение дискретной передаточной функции ПИ регулятора скорости СУИМ при следующих параметрах эквивалентного аналогового регулятора: коэффициент пропорциональности K п = 10 (о.е.), постоянная времени интегрирования T и = 0,1 с. Период дискретного управления принять равным T = 0,01 с. При дискретизации регулятора применить метод трапеций.
10. Привести выражение дискретной передаточной функции ПИД регулятора технологической координаты СУИМ при следующих параметрах эквивалентного аналогового регулятора: коэффициент пропорциональности K п = 10 (о.е.), коэффициент интегрирования К и = 10 (о.е.), коэффициент дифференцирования К д = 100 (о.е.). Период дискретного управления принять равным T = 0,01 с. При дискретизации регулятора применить метод прямоугольников.
| 1.Классификация исполнительных механизмов (ИМ): К ИМ постоянной скорости относят ИМ, работающие преимущественно в трех установившихся режимах в отношении скорости вращения на номинальной, на отрицательной номинальной, на нулевой скорости. Электрический ИМ (ЭИМ) – исполнительный механизм, использующий электрическую энергию для управления РО. В конструкцию электрического исполнительного механизма в общем случае входят электродвигатель, редуктор, ручной привод, указатель положения или скорости перемещения выходного элемента, конечные выключатели и датчики обратной связи. Пневматический исполнительный механизм (далее – ПИМ) является неотъемлемой и основной конструктивной частью пневматического привода (пневмопривода), включающего помимо ПИМ сети подготовки сжатого воздуха (компрессоры воздуха, фильтры и др.) и его распределения. Гидравлические исполнительные механизмы (ГИМ) являются неотъемлемой и основной конструктивной частью гидравлического привода (гидропривода), включающего помимо ГИМ гидробак, гидронасос, гидрораспределитель и др. устройства. ЭМИМ с регулирующим органом называют электромагнитным вентилем. Это вызвано тем, что они работают на запорные органы ЗРА типа «задвижка», а, следовательно, работают в схемах двухпозиционного регулирования и дистанционного управления. Широко используются при автоматизации холодильных установок в качестве электромагнитных вентилей прямого действия с диаметром условного прохода не более 10 мм и непрямого действия с диаметром условного прохода 25—65 мм Исполнительные механизмы переменной скорости В настоящее время в ряде технологических установок, таких как паровые и водогрейные котлы, насосные станции первого и второго подъема, системы транспорта жидкостей и газов и многих других, исполнительные механизмы постоянной скорости, работающие на ЗРА, заменяют на ИМ переменной скорости – насосы, вентиляторы, компрессоры с регулируемым расходом за счет изменения скорости вращения электроприводов (обычно с помощью частотно-регулируемого привода – ЧРП). зачастую позволяет сэкономить до 40 % потребляемой электроэнергии | 2 Классификация СУИМ
СУИМ как технические системы управления можно классифицировать по ряду основных признаков.
1. По степени автоматизации функций управления:
системы ручного управления
системы автоматизированного управления (человеко-машинные СУИМ);
системы автоматического управления ИМ (без участия человека);
По типу исполнительного механизма:
электрические (электромеханические
);– гидравлические СУИМ
;– пневматические СУИМ
электромагнитные СУИМ
По характеру протекания процессов в СУИМ и, соответственно, форме математического описания:
непрерывные (аналоговые)
дискретные (релейные, импульсные, цифровые)
По принципу управления
– системы стабилизации
наличию существенных нелинейностей в СУИМ
По наличию силового преобразователя подводимой энергии
СУИМ без силового преобразователя энергии (с непосредственной коммутацией электродвигателя к промышленной электросети
СУИМ с силовым преобразователем энергии (с электромашинным, тиристорным, транзисторным, симисторным, электропневматическим, электрогидравлическим преобразователем
По виду выходной координаты ИМ или технологической координаты ОУ
наличию и типу обратных связей:
разомкнутые СУИМ
);– замкнутые СУИМ
по вектору состояния ОУ
– с компенсацией возмущающих воздействий ОУ
По принципу управления:
По типу регуляторов, применяемых в устройстве управления
По числу и связности каналов управления
одномерные СУИМ
);– многомерные СУИМ
По типу элементной базы устройства управления:
– на основе операционных усилителей в интегральном исполнении;– на основе логических
на основе унифицированных блочных систем регуляторов (аналоговых или дискретных)

|
| Методы описания функциональных элементов СУИМ и их взаимосвязь – обыкновенные дифференциальные уравнения (для объектов с сосредоточенными параметрами) или дифференциальные уравнения в частных производных (для объектов с распределенными параметрами); в основе их составления лежат функциональные схемы той или иной степени детализации, в том числе схемы замещения; векторно-матричные уравнения; в основе их составления лежат дифференциальные уравнения или структурные схемы, а результатом их составления являются структурные схемы пространства состояний. | 3 Математические модели основных функциональных элементов СУИМ как подобъектов управления 4 Электрические исполнительные механизмы постоянной скорости поворотного и вращательного движения типов МЭО и МЭМ содержат, в общем случае цилиндрические, конические, червячные и планетарные передачи. 5 Асинхронные двигатели относятся к двигателям переменного тока, принимающим главенствующее участие в управлении технологическими процессами и производственными установками 6 асинхронные двигатели с короткозамкнутым ротором (АДКР), питающиеся от трехфазной сети переменного тока (~220 В и более); 7 синхронные двигатели с постоянными магнитами (СДПМ), питающиеся от трех- или однофазной сети переменного тока. 8 Коллекторные двигатели постоянного тока 9 машины, преобразующие электрическую энергию питающей сети переменного или постоянного тока в механическую энергию движения рабочих органов (РО) исполнительных механизмов (ИМ). 10 Шаговые двигатели 11 Шаговые двигатели (ШД) – это электромеханические устройства, преобразующие сигнал управления в угловое или линейное перемещение ротора с фиксацией его в заданном положении без устройств обратной связи 12 Силовые преобразователи энергии (СПЭ) служат для преобразования электрической энергии промышленной питающей сети в электрическую энергию с параметрами, отличающимися от параметров питающей сети 13 В результате СПЭ выполняет функции своеобразного силового адаптера, обеспечивающего, в общем случае, возможность регулирования этих величин для управления ЭИМ. Электромашинные преобразователи 14 Системы регулирования ряда электроприводов ИМ могут содержать в качестве силового регулируемого преобразователя электромашинный агрегат, содержащий гонный двигатель и генератор постоянного тока, выходная э.д.с. которого регулируется изменением тока возбуждения. 15 Тиристорные преобразователи Тиристорные преобразователи (ТП) применяются в качестве источников регулируемого напряжения для питания якорной цепи или цепи возбуждения коллекторных электродвигателей постоянного тока (ДПТ) ИМ. Для управления асинхронным двигателем (АДКР) тиристорный преобразователь применяется в качестве управляемого выпрямителя для регулирования напряжения в цепи постоянного тока частотного преобразователя со звеном постоянного тока. 16 Основными координатами СУИМ в составе технологических установок являются: скорость вращения w или линейная скорость V лин перемещения рабочего органа, угловое положение вала j или линейное перемещение S линрабочего органа, вращающий момент М на валу или перестановочное усилие F рабочего органа ИМ, давление P и расход Q жидкостей или газов температура T ° объекта управления и др. 17 описания элементов СУИМ используют различные формы, в частности: 18 – обыкновенные дифференциальные уравнения 19 операторные уравнения, передаточные функции и передаточные матрицы 20 векторно-матричные уравнения |
| 5 Принципы построения, задачи исследования и проектирования СУИМ Релейно-контакторные системы управления (РКСУ) реализуются по принципу разомкнутого управления и применяются для управления электроприводами производственных механизмов, к которым не предъявляются высокие требования к качеству управления и ограничению координат СУИМ на допустимых уровнях. Системы стабилизации технологических координатК системам стабилизации относятся, прежде всего, системы управления с непрерывным технологическим процессом (непрерывные прокатные станы, бумагоделательные машины, системы отопления и горячего водоснабжения и др.). Требования к системам стабилизации формулируются в отношении выходной координаты в статике и в динамике. обеспечение статической точности регулирования выходной координаты при действии возмущений внешней среды; обеспечение диапазона регулирования выходной координаты с заданной статической точностью. К системам стабилизации относятся, системы управления с непрерывным технологическим процессом (непрерывные прокатные станы, бумагоделательные машины, системы отопления и горячего водоснабжения и др.). Требования к системам стабилизации формулируются в отношении выходной координаты в статике и в динамике. Основной показатель функционирования следящих СУИМ – динамическая точность отработки достаточно плавно изменяемого задающего воздействия в условиях возмущающих воздействий на систему. Полная количественная оценка точности следящих СУИМ производится в результате анализа их работы в условиях совместного влияния задающих и возмущающих воздействий, которые, как правило, имеют стохастический (случайный) характер. | 6  Основные положения принципа подчиненного регулирования координат изложены ниже.
1. Объект управления представляют в виде n последовательно соединенных простейших линейных динамических звеньев с одним-двумя доминирующими полюсами (интегральных, апериодических первого-второго порядка) – W оу,1(p), W оу,2(p), …, W оу,n(p), где n – число контролируемых переменных).
2. В передаточную функцию младшего подобъекта управления W оу,1(p) включают фильтр с эквивалентной малой (некомпенсированной) постоянной времени контура T m, определяющей такие важнейшие свойства системы управления, как быстродействие, точность и помехозащищенность.
3. Устройство управления представляют в виде n последовательно соединенных регуляторов класса “вход-выход”.
4. Синтез СУИМ начинают с младшего (внутреннего) контура регулирования и заканчивают старшим (внешним) контуром, применяя единую типовую методику (см. раздел 6.3).
5. Каждый замкнутый синтезированный контур регулирования представляет собой оптимальный в некотором смысле линейный фильтр первого-третьего порядка. При этом оперируют понятием «оптимальные настройки контура».
6. Каждый синтезированный замкнутый контур регулирования аппроксимируют оптимальным звеном первого-второго порядка и после синтеза присоединяют к объекту управления последующего контура.
7. Ограничение координат объекта управления на допустимых уровнях осуществляют ограничением задающих воздействий соответствующих контуров регулирования.
Основные положения принципа подчиненного регулирования координат изложены ниже.
1. Объект управления представляют в виде n последовательно соединенных простейших линейных динамических звеньев с одним-двумя доминирующими полюсами (интегральных, апериодических первого-второго порядка) – W оу,1(p), W оу,2(p), …, W оу,n(p), где n – число контролируемых переменных).
2. В передаточную функцию младшего подобъекта управления W оу,1(p) включают фильтр с эквивалентной малой (некомпенсированной) постоянной времени контура T m, определяющей такие важнейшие свойства системы управления, как быстродействие, точность и помехозащищенность.
3. Устройство управления представляют в виде n последовательно соединенных регуляторов класса “вход-выход”.
4. Синтез СУИМ начинают с младшего (внутреннего) контура регулирования и заканчивают старшим (внешним) контуром, применяя единую типовую методику (см. раздел 6.3).
5. Каждый замкнутый синтезированный контур регулирования представляет собой оптимальный в некотором смысле линейный фильтр первого-третьего порядка. При этом оперируют понятием «оптимальные настройки контура».
6. Каждый синтезированный замкнутый контур регулирования аппроксимируют оптимальным звеном первого-второго порядка и после синтеза присоединяют к объекту управления последующего контура.
7. Ограничение координат объекта управления на допустимых уровнях осуществляют ограничением задающих воздействий соответствующих контуров регулирования.
|
7 Типовая методика структурно-параметрического синтеза контуров регулирования СУИМ
Структурно-параметрическая декомпозиция объекта управления.
Линейный объект управления разбивают на n последовательно соединенных динамических звеньев с одним или двумя доминирующими полюсами (апериодические первого-второго порядка и интегрирующие звенья); в объект регулирования каждого контура последовательно включают фильтр (апериодическое звено первого порядка) с эквивалентной малой постоянной времени (ЭМПВ) T m, I, i = 1,…, n; величину ЭМПВ T m, i каждого контура регулирования выбирают как минимум в два раза больше эквивалентной малой постоянной времени предыдущего контура регулирования, т.е. T m, i ³2 T m, i -1, i = 2,…, n.
В результате структурно-параметрической декомпозиции в объекте каждого контура регулирования должны быть выделены 1-2 БПВ и одна ЭМПВ T m, i.
Выбор критерия качества регулирования контура.
За критерий качества регулирования каждого контура будем принимать желаемую передаточную функцию разомкнутого контура. Для электромеханических СУИМ целесообразно применять настройки контуров регулирования на ТО, СО или АО. Желаемую передаточную функцию разомкнутого контура в этом случае записывают в виде (6.2), (6.5), (6.8), (6.11) или (6.14).
Определение структуры и параметров регулятора каждого контура регулирования (структурно-параметрический синтез регуляторов).
Передаточная функция оптимального регулятора i –го контура определяется в виде:
 (6.16)
где W оу, i (p) – передаточная функция объекта регулирования, входящая в контур регулирования;
W ос, i (p) – передаточная функция звена отрицательной обратной связи i -го контура регулирования.
Структура регулятора в соответствие с (6.16), как правило, является типовой. Далее производится расчет численных значений параметров синтезированных регуляторов (коэффициентов передач, постоянных времени интегрирования, дифференцирования).
Выбор элементной базы и расчет параметров принципиальной схемы регулятора каждого контура.
Современные электронные устройства управления непрерывных систем управления реализуют, как правило, на основе операционных усилителей в интегральном исполнении. В частности, в системах управления электроприводами широкое распространение получили следующие серии операционных усилителей: К140, К153, К553 и др.
Расчет параметров принципиальной схемы регулятора сводится к расчету численных значений резисторов и конденсаторов во входной цепи и цепи обратной связи операционного усилителя. (6.16)
где W оу, i (p) – передаточная функция объекта регулирования, входящая в контур регулирования;
W ос, i (p) – передаточная функция звена отрицательной обратной связи i -го контура регулирования.
Структура регулятора в соответствие с (6.16), как правило, является типовой. Далее производится расчет численных значений параметров синтезированных регуляторов (коэффициентов передач, постоянных времени интегрирования, дифференцирования).
Выбор элементной базы и расчет параметров принципиальной схемы регулятора каждого контура.
Современные электронные устройства управления непрерывных систем управления реализуют, как правило, на основе операционных усилителей в интегральном исполнении. В частности, в системах управления электроприводами широкое распространение получили следующие серии операционных усилителей: К140, К153, К553 и др.
Расчет параметров принципиальной схемы регулятора сводится к расчету численных значений резисторов и конденсаторов во входной цепи и цепи обратной связи операционного усилителя.
| 8 Системы стабилизации и программного регулирования скорости ИМ


|
9 Применительно к позиционным системам различают три режима их функционирования и, соответственно, три режима перемещения рабочих органов: – режим малых перемещений; – режим средних перемещений; – режим больших перемещений.
w двигателя ИМ не достигает рабочей максимальной скорости (wПри малых перемещениях скорость < max, /.w = e e < e(max), ускорение не достигает максимально допустимого значения w
В режиме средних перемещений скорость двигателя не достигает рабочей максимальной скорости, но ускорение двигателя (динамические момент, ток) может достигать предельного значения.)max e£e(В режиме больших перемещений и скорость, и ускорение max,w £ wдвигателя могут достигать максимального значения ().e£emax
 тиристорного преобразователя ТП, редуктор Р, регуляторы и датчики тока, скорости и положения (РТ, РС, РП, ДТ, ДС, СП), фазочувствительный выпрямитель ФЧВ. В качестве датчика положения применен сельсин-приемник (СП), а в качестве задатчика положения – сельсин-датчик (СД).
тиристорного преобразователя ТП, редуктор Р, регуляторы и датчики тока, скорости и положения (РТ, РС, РП, ДТ, ДС, СП), фазочувствительный выпрямитель ФЧВ. В качестве датчика положения применен сельсин-приемник (СП), а в качестве задатчика положения – сельсин-датчик (СД).
 
| 10 Дискретно-непрерывные СУИМ
 Дискретный характер имеют релейные, импульсные и цифровые сигналы.
Релейные системы оперируют с сигналами, квантованными по амплитуде.
В импульсных системах имеются сигналы, квантованные по времени (амплитудно-импульсные, широтно-импульсные, частотно-импульсные, фазо-импульсные и др.). Период T квантования сигналов в таких системах, как правило, постоянный.
Дискретные передаточные функции и разностные уравнения при описании СУИМ
В инженерной практике для описания динамических дискретных звеньев СУИМ (объектов управления, регуляторов, фильтров и т.п.) применяют дискретные передаточные функции (ДПФ), записываемые в виде [12,16,21]
Дискретный характер имеют релейные, импульсные и цифровые сигналы.
Релейные системы оперируют с сигналами, квантованными по амплитуде.
В импульсных системах имеются сигналы, квантованные по времени (амплитудно-импульсные, широтно-импульсные, частотно-импульсные, фазо-импульсные и др.). Период T квантования сигналов в таких системах, как правило, постоянный.
Дискретные передаточные функции и разностные уравнения при описании СУИМ
В инженерной практике для описания динамических дискретных звеньев СУИМ (объектов управления, регуляторов, фильтров и т.п.) применяют дискретные передаточные функции (ДПФ), записываемые в виде [12,16,21]
 где X (z), Y (z) – соответственно входная и выходная переменные дискретного звена.
Синтез цифровых систем управления
Существует множество методов синтеза цифровых систем управления, а также инженерных методик и алгоритмов, основанных на описании управляемых динамических процессов, как в частотной, так и во временной области [12,17,21-29]. Не умаляя достоинства большинства из них, отметим, что для синтеза цифровых СУИМ применяют следующие методы:
– метод дискретизации по времени аналоговых регуляторов класса “вход/выход” (метод аналогий) или метод билинейного преобразования;
– метод переменного коэффициента усиления;
– методы аналитического конструирования дискретных регуляторов состояния.
где X (z), Y (z) – соответственно входная и выходная переменные дискретного звена.
Синтез цифровых систем управления
Существует множество методов синтеза цифровых систем управления, а также инженерных методик и алгоритмов, основанных на описании управляемых динамических процессов, как в частотной, так и во временной области [12,17,21-29]. Не умаляя достоинства большинства из них, отметим, что для синтеза цифровых СУИМ применяют следующие методы:
– метод дискретизации по времени аналоговых регуляторов класса “вход/выход” (метод аналогий) или метод билинейного преобразования;
– метод переменного коэффициента усиления;
– методы аналитического конструирования дискретных регуляторов состояния.
  Иллюстрация метода дискретизации аналогового ПИД-регулятора
Метод переменного коэффициента усиления
Иллюстрация метода дискретизации аналогового ПИД-регулятора
Метод переменного коэффициента усиления
 Входным воздействием регулятора является ошибка регулирования
e (kT), выходным – сигнал управления u (kT). Ошибка регулирования e (kT) на входе звена с переменным коэффициентом усиления обновляется и фиксируется с помощью экстраполятора нулевого порядка с каждым тактом дискретизации Т.
Входным воздействием регулятора является ошибка регулирования
e (kT), выходным – сигнал управления u (kT). Ошибка регулирования e (kT) на входе звена с переменным коэффициентом усиления обновляется и фиксируется с помощью экстраполятора нулевого порядка с каждым тактом дискретизации Т.
|
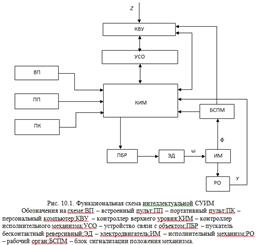 Технические средства интеллектуализации СУИМ
К техническим средствам интеллектуализации в соответствие с приведенной выше функциональной схемой СУИМ относят:
– интеллектуальные ИМ;
– программируемые логические контроллеры (ПЛК) ИМ;
– технологические измерители-регуляторы, регуляторы микропроцессорные универсальные, сигнализаторы;
– многоканальные модули ввода-вывода и управления распределенных СУИМ (MDS -модули);
– бесконтактные симисторные пускатели и микропроцессорные СПЭ.
Технические средства интеллектуализации СУИМ
К техническим средствам интеллектуализации в соответствие с приведенной выше функциональной схемой СУИМ относят:
– интеллектуальные ИМ;
– программируемые логические контроллеры (ПЛК) ИМ;
– технологические измерители-регуляторы, регуляторы микропроцессорные универсальные, сигнализаторы;
– многоканальные модули ввода-вывода и управления распределенных СУИМ (MDS -модули);
– бесконтактные симисторные пускатели и микропроцессорные СПЭ.
|