Рассмотрим колесо червячной передачи, укрепленное на валу, вращающемся в подшипниках (см. рисунок 2). Червяк передает червячному колесу силу F, не лежащую в плоскости, перпендикулярной оси.
Разложим силу F на три взаимно-перпендикулярные составляющие F1, F2 и F3.
Составляющую F1 назовем окружной силой, составляющую F2 – осевой силой, а составляющую F3 – радиальной силой.
Из рисунка видно, что составляющая F1 вызывает вращательное действие, которое измеряется произведением силы F1 на радиус колеса r; составляющая F2 стремится сдвинуть червячное колесо вдоль оси, а составляющая F3 стремится изогнуть ось колеса.
Очевидно, что вращающее действие сил F2 и F3 относительно оси колеса равно нулю.
Таким образом, если нужно найти момент силы относительно оси, то следует принимать в расчет только составляющую F1, лежащую в плоскости, перпендикулярной оси, и не пересекающую ось  (иначе ее момент будет равен нулю).
(иначе ее момент будет равен нулю).
Ранее было отмечено, что проекция вектора силы на ось есть скалярная алгебраическая величина. В отличие от проекции на ось проекция силы на плоскость есть величина векторная, так как эта проекция характеризуется не только числовым значением, но и положением на плоскости, т. е. направлением.
Поэтому моменту силы относительно оси можно дать такое определение: моментом силы относительно оси называется величина, равная моменту проекции этой силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с плоскостью.
Это определение поясняет рисунок 3.
Момент силы относительно оси условимся записывать следующим образом:
Mz(F) = Fна.
Условимся считать момент силы положительным, если смотреть с положительного конца оси и сила стремится вызвать вращение против часовой стрелки, если же сила стремится вызвать вращение по часовой стрелке, ее момент считаем отрицательным.
Момент силы относительно оси не меняется при перемещении силы вдоль оси ее действия.
Момент силы будет равен нулю в двух случаях (не считая случаев, когда сила равна нулю или направлена вдоль оси):
· если вектор силы параллелен оси, так как при этом проекция силы на плоскость, перпендикулярную оси, равна нулю (см. рисунок 3, сила FZ);
· если линия действия силы пересекает ось, так как при этом плечо равно нулю (сила F3 на рисунке 2).
***
Аналитические условия равновесия пространственной системы произвольно расположенных сил
Пространственная система сил, в которой линии действия составляющих сил расположены произвольно, т. е. линии их действия могут не пересекаться и находиться в разных плоскостях, называется произвольно расположенной системой сил.
Для равновесия пространственной системы произвольно расположенных сил необходимо и достаточно, чтобы алгебраическая сумма проекций всех сил на каждую из трех осей координат была равна нулю и чтобы алгебраическая сумма моментов всех сил относительно каждой из этих осей была равна нулю.
Строгое обоснование приведенного выше условия равновесия пространственной системы произвольно расположенных сил требует знания некоторых вопросов, не предусмотренных программами учреждений среднего профессионального образования, поэтому условие равновесия такой системы здесь приводится без доказательства.
Математически условие равновесия пространственной системы произвольно расположенных сил можно записать в виде уравнений:
· ΣX = 0; ΣMx(Fi) = 0;
· ΣY = 0; ΣMy(Fi) = 0;
· ΣZ = 0; ΣMz(Fi) = 0.
Свободное тело в пространстве имеет шесть степеней свободы, а именно: возможность перемещаться в направлениях трех взаимно-перпендикулярных осей координат и возможность вращаться вокруг этих осей. Таким образом, шести степеням свободы тела в пространстве соответствуют шесть условий равновесия.
Если система сил, приложенных к свободному телу, удовлетворяет всем шести условиям равновесия, то возможность трех перемещений и трех вращений тела под действием сил системы исключена, поэтому тело будет находится в равновесии.
Очевидно, что все выведенные ранее условия равновесия для различных систем сил являются частными случаями условия равновесия пространственной системы произвольно расположенных сил.
Так как условия равновесия пространственной системы сил справедливы для любых прямоугольных осей координат, то при решении данной задачи систему координат можно изменять, т. е. часть уравнений равновесия составить для одних осей координат, а часть – для измененных. В некоторых случаях этот прием упрощает решение задач.
***
Теорема о моменте равнодействующей относительно оси
(теорема Вариньона)
Теорема: момент равнодействующей относительно оси равен алгебраической сумме моментов, составляющих сил относительно этой же оси.
Пусть даны пространственная система n произвольно расположенных сил, приложенных к телу, и равнодействующая этой системы сил FΣ (см. рисунок 4):
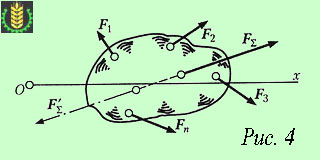
(F1, F2, F3,....Fn) ≡ FΣ.
Приложим к телу другую систему сил, равнодействующая которой F’Σ по модулю равна FΣ и направлена по той же линии действия, но в противоположную сторону, т. е. является уравновешивающей данной системы сил.
Тогда можно записать:
(F1, F2, F3,....Fn, F’Σ) ≡ 0, или (FΣ, F’Σ) ≡ 0.
Так как обе записанные выше системы сил эквивалентны нулю, т. е. уравновешены, то к ним можно применить любое условие равновесия, например
ΣMx(Fi) = 0.
Запишем это условие для обеих систем:
Mx(F1) = Mx(F2) + Mx(F2) +.... + Mx(Fn) + Mx(F’Σ) = 0;
MΣ(FΣ) + Mx(F’Σ) = 0.
Так как правые части этих равенств равны, то будут равны и левые:
Mx(F1) = Mx(F2) + Mx(F3) +.... +Mx(Fn) + Mx(F’Σ) = Mx(FΣ) + Mx(F’Σ).
Сократив общее слагаемое Mx(F’Σ), получим:
Mx(F1) = Mx(F2) + Mx(F3) +.... +Mx(Fn) = Mx(FΣ) или ΣMx(Fi) + Mx(FΣ).
Теорема доказана.