Как уже отмечалось, асинхронный двигатель состоит из двух основных частей, разделенных воздушным зазором: неподвижного статора и вращающегося ротора. Каждая из этих частей имеет сердечник и обмотку.
Неподвижная часть двигателя — статор — состоит из корпуса 11 и сердечника 10 с трехфазной обмоткой. Корпус двигателя отливают из алюминиевого сплава или из чугуна либо делают сварным. Рассматриваемый двигатель имеет закрытое обдуваемое исполнение. Поэтому поверхность его корпуса имеет ряд продольных ребер, назначение которых состоит в том, чтобы увеличить поверхность охлаждения двигателя.
В корпусе расположен сердечник 10 статора, имеющий шихтованную конструкцию: отштампованные листы из тонколистовой электротехнической стали толщиной обычно 0,5 мм покрыты слоем изоляционного лака, собраны в пакет и скреплены специальными скобами или продольными сварными швами по наружной поверхности пакета. Такая конструкция сердечника способствует значительному уменьшению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. На внутренней поверхности сердечника статора имеются
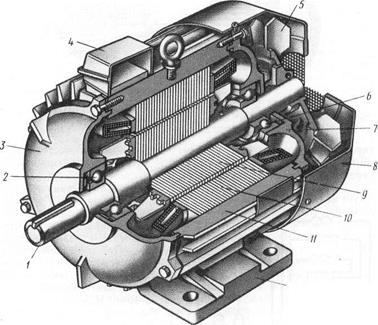
Рис. 2. Устройство трехфазного асинхронного двигателя с короткозамкнутым
ротором:
1 — вал; 2, 6 — подшипники; 3, 7 — подшипниковые щиты; 4 — коробка выводов; 5 — вентилятор; 8 — кожух вентилятора; 9 — сердечник ротора с короткозамкнутой обмоткой;
10 — сердечник статора с обмоткой; 11 — корпус; 12 — лапы
продольные пазы, в которых расположены пазовые части обмотки статора, соединенные в определенном порядке лобовыми частями, находящимися за пределами сердечника по его торцовым сторонам.
В расточке статора расположена вращающаяся часть двигателя — ротор, состоящий из вала 1 и сердечника 9 с короткозамкнутой обмоткой. Такая обмотка, называемая «беличье колесо», представляет собой ряд металлических (алюминиевых или медных) стержней, расположенных в пазах сердечника ротора, замкнутых с двух сторон короткозамыкающими кольцами. Сердечник ротора также имеет шихтованную конструкцию, но листы ротора не покрыты изоляционным лаком, а имеют на своей поверхности тонкую пленку окисла. Это является достаточной изоляцией, ограничивающей вихревые токи.
Вал ротора вращается в подшипниках качения 2 и 6, расположенных в подшипниковых щитах 3 и 7.
Охлаждение двигателя осуществляется методом обдува наружной оребренной поверхности корпуса. Поток воздуха создается центробежным вентилятором 5, прикрытым кожухом 8. на торцовой поверхности этого кожуха имеются отверстия для забора воздуха.
Концы обмоток фаз выводят на зажимы коробки выводов 4.
Монтаж двигателя в месте его установки осуществляется либо посредством лап 12, либо посредством фланца. В последнем случае на подшипниковом щите делают фланец с отверстиями для крепления двигателя на рабочей машине. Для предохранения обслуживающего персонала от возможного поражения электрическим током двигатели снабжаются болтами заземления (не менее двух).
1 ОБОСНОВАНИЕ И ВЫБОР ОСНОВНЫХ РАЗМЕРОВ
Данный расчёт производится по методике предложенной в [1].
1.1 Выбираем наружный диаметр статора [1,с.164]. Для асинхронных двигателей серии 4А при
h = 355 мм, Da =0,660м.
1.2 Внутренний диаметр статора [1,с.164]:
D = Da · Kd,
где Kd – коэффициент, характеризующий отношения внутренних и внешних диаметров сердечников статоров асинхронных двигателей при различных числах полюсов находится в пределах (0,52 ¸ 0,77), принимаем Kd = 0,74 [1,с.164]:
D = 0.355·0.65 = 0.231 м.
1.3 Полюсное деление τ [1,с.166]:
 м.
м.
1.4 Расчётная мощность[1,с.164]:
 ,
,
где Kε – коэффициент ЭДС обмотки статора к номинальному напряжению, зависит от Da. Выбираем Kε = 0.95 [1,с.164];
η - КПД двигателя, зависит от P2н, принимаем равным η = 0,95 [1,с.165];
cosφ – коэффициент мощности, зависит от P2н, принимаем равным cosφ = 0,76;
 Вт.
Вт.
1.5 Предварительный выбор электромагнитных нагрузок [1,с.166];
принимаем А =38,5·103 А / м,
принимаем Вδ = 0.815 Тл.
1.6 Выбираем обмоточный коэффициент для двухслойной обмотки [1,с.167] при 2p = 12 он может быть взят:
Коб1 = 0.91
1.7 Рассчитаем длину магнитопровода [1,с.168]:
 ,
,
где kВ – коэффициент формы поля рассчитывается по формуле [1,с.167]:

Ω - синхронная угловая частота вала [1,с.168]:
 рад/с;
рад/с;
 м.
м.
1.8 Критерием правильности выбора главных размеров служит отношение λ, определяемое по формуле:
λ = lδ / τ =0.25 / 0.128 =1.95
Полученное значение входит в область рекомендуемых пределов [1,с.168]
λ =1,74 – 2,1.
2 ЭЛЕКТРОМАГНИТНЫЙ РАСЧЁТ
2.1 ОПРЕДЕЛЕНИЕ ЧИСЛА ПАЗОВ, КОЛИЧЕСТВА ВИТКОВ И ПЛОЩАДИ ПОПЕРЕЧНОГО СЕЧЕНИЯ ПРОВОДА ОБМОТКИ СТАТОРА
2.1.1 Выберем предельные значения зубцового деления tZ1 [1,с.170]:
tZ1min = 0.0145 м; tZ1max = 0.0165 м.
2.1.2 Возможное число пазов статора Z1 [1,с.170]:
 ;
;
 ;
;
Выбираем окончательно число пазов статора равным Z1 = 90. Выбор обосновывается тем, что число пазов статора в большинстве асинхронных двигателей должно быть кратно числу фаз, а число пазов на полюс и фазу (q) - целым. Обмотки с дробным числом q при сравнительно небольших числах пазов и полюсов, характерных для большинства асинхронных двигателей, приводят к некоторой асимметрии МДС. Большее количество пазов приводит к улучшению рабочих характеристик, но и, одновременно, к увеличению расхода меди, т.е. стоимость машины при этом повышается.
Проверим величину q:
q = Z1 / 2·p·m = 90/ 2·6·3 = 2,5.
2.1.3 Окончательное значение зубцового деления статора [1,с.241]:
 м. Рассчитаем номинальный ток обмотки статора [1,с.171]:
м. Рассчитаем номинальный ток обмотки статора [1,с.171]:
 А.
А.
Определим число эффективных проводников в пазу. Для этого предварительно, при
условии, что число параллельных ветвей обмотки а = 1 рассчитаем [1,с.171]:
 .
.
Принимаем а =6, тогда значение числа проводников в пазу [1,с.171]:
 .
.
Окончательно принимаем UП =24.
Ориентируясь на мощность машины, выбираем двухслойную петлевую обмотку с укороченным шагом со следующими параметрами:
Полюсное деление:  .
.
Укорочение шага [1, с.69]:
 .
.
Обмоточный коэффициент [1, с.68]:
 ,
, 
где  - коэффициент укорочения, учитывающий уменьшение ЭДС витка, вызванное укорочением шага обмотки [1, с.69]:
- коэффициент укорочения, учитывающий уменьшение ЭДС витка, вызванное укорочением шага обмотки [1, с.69]:
 .
.
 коэффициент распределения, учитывающий уменьшение ЭДС распределенной по пазам обмотки по сравнению с сосредоточенной [1, с.71]:
коэффициент распределения, учитывающий уменьшение ЭДС распределенной по пазам обмотки по сравнению с сосредоточенной [1, с.71]:  = 0,96.
= 0,96.
Тогда  .
.
2.1.4 Число витков в фазе обмотки статора [1,с.171]:
2.1.5 Найдём окончательное значение линейной нагрузки [1,с.171]:
 А / м
А / м
Рассчитаем значение потока [1,с.172]:
 Вб.
Вб.
Определим значение индукции в воздушном зазоре [1,с.172]
 Тл.
Тл.
Значения А и Вd находятся в допустимых пределах (5 %).
Определим допустимую плотность тока в обмотке статора, с учётом линейной нагрузки двигателя [1,с.172]
2.1.6
 ,
,
где AJ – среднее значение произведения [1,с.173], зависит от Da,;
AJ =156·109 А2/м3
 А /м2..
А /м2..
2.1.7 Площадь поперечного сечения эффективного проводника предварительно
[1,с.172]:
 м2.
м2.
Окончательно выберем сечение проводника следующим образом:
Примем число элементарных проводников nэл = 4, тогда
 м2.
м2.
Принимаем обмоточный провод марки ПЭТВ [1,с.470]:
dэл = 1,5 мм – диаметр неизолированного провода;
dиз = 1,585 мм;, тогда
 мм2.
мм2.
2.1.8 Уточнённое значение плотности тока в обмотке статора [1,с.174]:
 А /мм2.
А /мм2.
2.2 РАСЧЁТ ЗУБЦОВОЙ ЗОНЫСТАТОРА И ВОЗДУШНОГО ЗАЗОРА
2.2.1 Выбор формы паза статора. Круглые обмоточные провода всыпной обмотки могут быть уложены в пазы произвольной конфигурации, поэтому размеры зубцовой зоны при всыпных обмотках выбирают таким образом, чтобы параллельные грани имели зубцы, а не пазы статора. Такие зубцы имеют постоянное, не изменяющееся с высотой зубца поперечное сечение, индукция в них также не изменяется, и магнитное напряжение зубцов с параллельными гранями оказывается меньше, чем магнитное напряжение трапецеидальных зубцов, при том же среднем значении индукции в них. Это объясняется отсутствием в зубцах с параллельными гранями участков с высокой индукцией, напряжённость поля в которых резко возрастает из-за нелинейности магнитной характеристики стали, увеличивая суммарное магнитное напряжение зубцов. В большинстве современных двигателей выполняют трапецеидальные пазы. Поэтому выбираем именно такие пазы (Рисунок 1)..
2.2.2 Расчёт зубцовой зоны статора.
Выбираем допустимые значения индукции [1,с.174]:
ярма статора – Ва = 1,05 Тл; зубцов статора при постоянном сечении – ВZ1 = 1.55 Тл,
Выбираем способ изолирования листов – оксидирование, тогда коэффициент заполнения сердечника сталью kc = 0.95 [1,с.176].
2.2.3 Определим ширину зубцов статора [1,с.178]:
 .м
.м
Найдём высоту ярма статора [1,с.175]:
 м.
м.
Высота шлица hш =1·10-3 м, для двигателей с h > 160 мм. Высота шлица полузакрытых пазов bш = 4·10-3 м, [1,с.178]
Определим размеры паза в штампе [1,с.178]:
 м;
м;
 ,
,
 м;
м;
 м.
м.
Клиновую часть паза найдём из выражения [1,с.179]:
 м.
м.
2.2.4 Размеры паза в свету с учётом припуска на шихтовку сердечника [1,с.177]:
Δb = 0.3·10-3 м; Δh = 0.3·10-3 м
 мм;
мм;
 мм;
мм;
 мм.
мм.
Одностороннюю толщину изоляции в пазу [1,с.62]
bиз = 0,58·10-3 м.
Площадь поперечного сечения корпусной изоляции в пазу[1,с.179]:
 мм
мм  .
.
Площадь поперечного сечения паза для размещения проводников обмотки [1,с.180]:  мм .
мм .
Площадь прокладок в пазу [1, с.179]

2.2.5 Подсчитаем коэффициент заполнения паза[1,с.180]:  =1,585мм
=1,585мм

Полученное значение kз допустимо для механизированной укладки обмотки (kз= 0,65-0.75).

Рис. 1 Трапецеидальные пазы статора
2.3 РАСЧЁТ РОТОРА
2.3.1 Воздушный зазор [1,с.181], зависит от D: δ = 1·10-3 м. Правильный выбор воздушного зазора δ во многом определяет энергетические показатели асинхронного двигателя. Чем меньше воздушный зазор, тем меньше его магнитное сопротивление и магнитное напряжение, составляющее основную часть МДС магнитной цепи всей машины. Поэтому уменьшение зазора приводит к соответственному уменьшению МДС магнитной цепи и намагничивающего тока двигателя, благодаря чему возрастает его cosφ и уменьшаются потери в меди обмотки статора. Но чрезмерное уменьшение δ приводит к возрастанию амплитуды пульсаций индукции в воздушном зазоре и, как следствие этого, к увеличению поверхностных и пульсационных потерь. Поэтому КПД двигателей с очень малыми зазорами не улучшается, а часто даже становится меньше. Необходимо также учесть условие механической прочности так, чтобы прогиб вала не привёл к касанию сердечников ротора и статора.
2.3.2 Число пазов ротора [1,с.185], зависит от 2р: Z2 = 106. Выбор пазов ротора особо важен, так как в поле воздушного зазора машины кроме основной присутствует целый спектр гармоник более высокого порядка, каждая из которых наводит ЭДС в обмотке ротора, поэтому ток в стержнях обмотки имеет сложный гармонический состав. В зависимости от соотношения Z1 и Z2 в той или иной степени проявляются синхронные или асинхронные моменты от высших гармоник. Их влияние на момент от первой гармонической приводит к появлению пиков и провалов в результирующей кривой момента. В поле зазора присутствуют также высшие гармоники, порядок которых определенным образом связан с числами пазов и полюсов машины. Эти зубцовые гармоники вызывают шум и вибрацию при работе двигателя в номинальном режиме. Их влияние особо заметно при малых воздушных зазорах. Наилучшие сочетания Z1 и Z2 сведены в таблицу [6-15, 1 c 185]. В двигателях большой мощности иногда выполняют Z1 < Z2. Это связано с тем чтобы ограничить чрезмерно большой ток в стержнях ротора и увеличить равномерность распределения проводников обмотки по длине расточки.
2.3.3 Внешний диаметр ротора:
 м.
м.
2.3.4 Длина магнитопровода ротора: l2 = ld = 0.25 м.
2.3.5 Зубцовое деление ротора:
 м.
м.
2.3.6 Внутренний диаметр ротора равен диаметру вала, так как сердечник ротора непосредственно насаживается на вал [1,с.191]:
 м;
м;
где kB = 0.23 - эмпирический коэффициент [1,с.191], зависит от h и 2р.
2.3.7 Ток в стержне ротора [1,с.183]:
 ,
,
где ki - коэффициент, учитывающий влияние тока намагничивания на отношение I1 / I2:
[1,с.183]:
ki = 0.81
vi - коэффициент приведения токов [1,с.185]:
 , (пазы ротора делаем без скоса- kск =1)
, (пазы ротора делаем без скоса- kск =1)

 А.
А.
2.3.8 Площадь поперечного сечения стержня предварительно [1,с.186]:
 ,
,
где J2 =2,5·106 А /м2 – плотность тока в стержнях ротора машин закрытого обдуваемого исполнения при заливке пазов алюминием[1,с.186];
тогда:
 м
м
2.3.9 Выбираем пазы ротора грушевидной формы. Форма паза и конструкция обмотки
короткозамкнутого ротора определяются требованиями к пусковым характеристиками двигателя и его мощностью. В асинхронных двигателях мощностью до 50 – 60 кВт обычно выполняют грушевидные пазы и литую обмотку из алюминия.
Размеры шлица [1,с.188]: bш = 1,5·10-3 м; hш =1.5·10-3 м;  м;
м;
Выбираем допустимую индукцию для зубцов ротора [1,с.174] ВZ2 = 1.8 Тл.
Допустимая ширина зубца [1,с.188]:
 м.
м.
Размеры паза [1,с.188]:
 ,
,  м;
м;
 ,
,
 м;
м;
 м.
м.
Уточняем ширину зубцов ротора по формулам 6-79, 6-80 [1, с. 188]

 м;
м;

 м;
м;
Принимаем 
 мм;
мм;  мм;
мм;
Полная высота паза:

 м;
м;
2.3.10 Площадь поперечного сечения стержня [1,с.188]:
 ,
,
 м2;
м2;
Плотность тока в стержне:
 А /м2.
А /м2.
2.3.11 Короткозамыкающие кольца:
Ток в короткозамкнутом кольце [1,с.186]:
 ,
,
где Δ – коэффициент [1,с.186]:
 ,
,
тогда:
 A.
A.

Рис. 2 Грушевидные пазы ротора
Плотность тока в замыкающих кольцах выбирают в среднем на 15 – 20% меньше, чем в стержнях из-за лучших условий охлаждения колец, а также потому, что в машинах, в которых для улучшения пусковых характеристик используют эффект вытеснения тока, большое сопротивление замыкающих колец снижает кратность увеличения общего сопротивления обмотки ротора при пуске.
 A / м2 .
A / м2 .
Площадь поперечного сечения кольца [1,с.186]:
 м2.
м2.
Размеры замыкающих колец[1,с.244]:
 м;
м;
 м;
м;
 м.
м.

Рис. 3 Размеры замыкающих колец короткозамкнутого ротора
2.4 РАСЧЁТ МАГНИТНОЙ ЦЕПИ
2.4.1 Магнитопровод из стали 2312; толщина листов 0.5 мм.
Магнитное напряжение воздушного зазора [1,с.194]:
 , где kδ – коэффициент воздушного зазора [1,с.106]:
, где kδ – коэффициент воздушного зазора [1,с.106]: 
m0 – магнитная постоянная, m0 = 4p×10-7 Гн/м. где  ,
,
тогда:

тогда:
 А.
А.
2.4.2 Для определения магнитного напряжения зубцовой зоны статора прежде найдём индукцию в них[1,с.192]:
 Тл.
Тл.
Магнитное напряжение зубцовой зоны статора [1,с.194]:

hZ1 - высота зубца, hZ1 = hП = 0.0502 м;
HZ1 – напряжение зубцовой зоны статора [1,с.462]
HZ1 = 1240 А /м, для ВZ1 = 1.54 Тл.
тогда:
 А.
А.
2.4.3 Для определения магнитного напряжения зубцовой зоны ротора прежде найдём индукцию в них[1,с.194]:
 Тл
Тл
Магнитное напряжение зубцовой зоны ротора [1,с.194]:

hZ2=hп2-0,1∙b2 высота зубца hZ2 =29,45∙10-3 -0.1∙3.05∙10-3 =25.94∙10-3 м
HZ2 – напряжение зубцовой зоны ротора [1,с.462]
HZ2 = 2920 А /м, для ВZ2 =1.82 Тл.
тогда:
 А.
А.
2.4.4 Коэффициент насыщения зубцовой зоны [1,с.194]:

Если kZ >1.5 – 1.6, имеет место чрезмерное насыщение зубцовой зоны; если kZ <1.2, то зубцовая зона мало использована или воздушный зазор взят слишком большим. В данном расчёте коэффициент насыщения зубцовой зоны входит в диапазон рекомендуемых значений.
2.4.5 Магнитное напряжение ярма статора. Предварительно найдём длину средней
магнитной силовой линии в ярме [1,с.195]:
 м,
м,
Индукция в ярме статора [1,с.193]:
 Тл,
Тл,
Напряжённость поля ярма статора при индукции [1,с.462],
Ва = 1.05 Тл, Ha =300 A /м,
тогда магнитное напряжение:
 А.
А.
2.4.6 Магнитное напряжение ярма ротора. Рассчитаем длину ярма ротора
[1,с.195]: (Dв = Dj=0.150)
 м.
м.
Предварительно определим длину средней магнитной силовой линии в ярме ротора
[1,с.195]:
 м.
м.
В двигателях с непосредственной посадкой сердечника ротора на вал часть силовых магнитных линий замыкаются через вал, поэтому расчетную высоту ярма ротора, м, определяют по формуле [1,с.194]:
 м.
м.
Индукция в ярме ротора [1,с.193]:
 Тл.
Тл.
Напряжённость поля ярма ротора при индукции Вj = 0.29 Тл [1,с.462]
Hj = 64,5 A /м, тогда магнитное напряжение:
 А.
А.
2.4.7 Магнитное напряжение на пару полюсов [1,с.195]:
 А.
А.
2.4.8 Коэффициент насыщения магнитной цепи [1,с.195]:
 Намагничивающий ток [1,195]:
Намагничивающий ток [1,195]:
 А.
А.
Выразим намагничивающий ток в долях номинального тока двигателя
[1,с.195]:
 .
.
Относительное значение Im* служит определенным критерием правильности произведенного выбора и расчета размеров и обмотки двигателя.
2.5 ПАРАМЕТРЫРАБОЧЕГО РЕЖИМА
Параметрами асинхронной машины называют активные и индуктивные сопротивления обмоток статора r1, x1, ротора или приведенные к числу витков обмотки статора сопротивления ротора r2’, x2’, сопротивление взаимной индуктивности x12 и расчетное сопротивление r12, введением которого учитывают влияние потерь в стали статора на характеристики двигателя.
2.5.1 Определим среднюю ширину катушки [1,с.197]:
 м,
м,
Длинна вылета лобовой части катушки [1,с.197]:
 ,
,
где kвыл - коэффициент, зависит от числа полюсов [1,с.197], для изолированных лентой лобовых частей примем при 2р = 12, kвыл = 0,72;
В – длина вылета прямолинейной части катушек из паза [1,с.197]: В = 0.015 м – для всыпной обмотки,
тогда:
 м,
м,
Длинна пазовой части равна конструктивной длине сердечников машины:
lП = lδ = 0.25 м
Длинна лобовой части всыпной обмотки [1,с.197]:
 ,
,
где kл - коэффициент, зависит от числа полюсов [1,с.197], для изолированных лентой лобовых частей kл = 1.9
 м,
м,
Средняя длина витка [1,с.197]:
 м
м
Общая длина проводников фазы обмотки [1,с.196]:
 м
м
2.5.2 Активное сопротивление обмотки статора [1,с.196]:
 Ом,
Ом,
где ρ115 =10-6 / 40 Ом ·м - удельное сопротивление меди при температуре + 115 0С;
коэффициент увеличения активного сопротивления фазы обмотки от действия эффекта вытеснения тока, kR = 1
Относительное значение активного сопротивления обмотки статора:
 о.е,
о.е,
2.5.3 Сопротивление стержня обмотки ротора [1,с.202]:
 Ом,
Ом,
где ρ115 =10-6 / 12,3 Ом ·м - удельное сопротивление литой алюминиевой обмотки ротора
при температуре плюс 115 0С
Сопротивление участка замыкающего кольца, заключённого между двумя соседними стержнями [1,с.202]:
 Ом
Ом
2.5.4 Активное сопротивление фазы обмотки ротора [1,с.202]:
 Ом,
Ом,
Для дальнейших расчётов полученное сопротивление фазы обмотки ротора приводят к числу витков обмотки статора [1,с.202]:
 Ом,
Ом,
Относительное значение
 о.е.
о.е.
2.5.5 Коэффициенты магнитной проводимости.
kβ - коэффициент зависящий от укорочения шага обмотки выбираем kβ = 0,888 [1,с.403]:

 м
м

 м
м
Коэффициент магнитной проводимости пазового рассеяния [1,с.200]:  ,
,
 ,
,
Коэффициент магнитной проводимости лобового рассеяния [1,с.199]:

Коэффициент магнитной проводимости дифференциального рассеяния
[1,с.202]:

где ξ – коэффициент [1,с.203]:


2.5.6 Индуктивное сопротивление фазы обмотки статора [1,с.114]:
 ,
,
 Ом
Ом
Относительное значение индуктивного сопротивления фазы обмотки статора [c.205]:
 о.е,
о.е,
2.5.7 Коэффициент магнитной проводимости пазового рассеяния ротора
[1,с.204]:
 ,
,
где  мм.
мм. 
Коэффициент магнитной проводимости лобового рассеяния [1,с.204]:
 ,
,

Коэффициент магнитной проводимости дифференциального рассеяния
[1,с.203]:
 ,
,
где ξ = 1

2.5.8 Индуктивное сопротивление фазы обмотки статора [1,с.203]:
 .
.
Приводим X2 к числу витков статора [c1,с.204]:
 Ом
Ом
Относительное значение[c1,с.205]:
 о.е.
о.е.
Для удобства сопоставления параметров отдельных машин и упрощения расчёта характеристик параметры асинхронных машин выражают в относительных единицах, принимая за базисные значения номинальное фазное напряжение и номинальный фазный ток.
2.6 РАСЧЁТ ПОТЕРЬ
Потери в асинхронных машинах подразделяют на потери в стали (основные и добавочные), электрические, вентиляционные, механические и добавочные при нагрузке.
Основные потери в стали рассчитываются только в сердечнике статора, так как частота перемагничивания ротора очень мала и потери в стали ротора даже при больших индукциях незначительны. Добавочные потери в стали подразделяют на поверхностные (потери в поверхностном слое коронок зубцов статора и ротора от пульсаций индукции в воздушном зазоре) и пульсационные потери в стали зубцов (от пульсации индукции в зубцах). Добавочные потери при нагрузке возникают за счет действия потоков рассеяния, пульсаций индукции в воздушном зазоре, ступенчатости кривых распределения МДС обмоток статора и ротора и ряда других причин. В короткозамкнутых роторах, кроме того, возникают потери от поперечных токов, т.е. токов между стержнями, замыкающихся через листы сердечника ротора.
2.6.1 Основные потери в стали статора асинхронной машины [c1,с.206]:
 ,
,
где p1.0 / 50 - удельные потери при индукции 1 Тл и частоте перемагничивания 50 Гц.
[c1,с.206]: сталь 2312 толщиной 0,5 мм; p1.0 / 50 = 1,75 Вт / кг;
β – показатель степени, учитывающий зависимость потерь в стали от частоты
перемагничивания, для большинства сталей β = 1.4;
kда и kдz – коэффициенты, учитывающие влияние на потери в стали неравномерности
распределения потока по сечениям участков магнитопровода и технологических
факторов. kда =1.6, kдz = 1.8,
та,, mZ1 - масса стали ярма и зубцов статора [c1,с.206]:
 ,
,
 ,
,
где γс – удельная масса стали; в расчётах принимают γс = 7.8·103 кг / м3 [c1,с.206],
 кг,
кг,
 кг,
кг,
тогда:
 Вт,
Вт,
2.6.2 Для нахождения поверхностных потерь прежде находят амплитуду пульсаций индукции в воздушном зазоре над коронками зубцов ротора:
 , [c1,с.206] где β02 = f(bш / δ); bш / δ = 4 ·10-3 / 1 ·10-3 =4 – по данному значению коэффициент
, [c1,с.206] где β02 = f(bш / δ); bш / δ = 4 ·10-3 / 1 ·10-3 =4 – по данному значению коэффициент
β02 =0,27 [c1,с.207],
 Тл на 1 м2 поверхности
Тл на 1 м2 поверхности
Поверхностные потери в роторе [c1,с.207]:

где pпов2 - удельные поверхностные потери, т.е. потери, в поверхностном слое коронок зубцов ротора [c1,с.207]:
 ,
,
где k02 - коэффициент, учитывающий влияние обработки поверхности головок
зубцов ротора на удельные потери[1,стр.207], k02 =1.5;
 Вт / м2,
Вт / м2,
тогда:
 Вт,
Вт,
2.6.3 Для определения пульсационных потерь необходимо определить массу ротора
[1,стр.208]:
 кг,
кг,
а также амплитуду пульсаций индукции в среднем сечении зубцов [1,стр.207]:
 Тл,
Тл,
тогда пульсационные потери в зубцах ротора [1,стр.207]:
 Вт
Вт
2.6.3 Сумма добавочных потерь в стали [1,стр.208]:
 Вт
Вт
2.6.4 Полные потери в стали [1,стр.208]:
 Вт
Вт
2.6.5 Механические потери [1,стр.209]:
 Вт,
Вт,
где KТ - коэффициент, для двигателей с 2·p = 12 равен [1,стр.209]
KТ =0,2.
2.6.6 Для определения тока холостого хода двигателя принимают, что потери на трение и вентиляцию и потери в стали при холостом ходе такие же, как и при номинальном режиме. При этом условии активная составляющая тока холостого хода: [1,стр.209]:
 ,
,
где Pэ1.х.х – электрические потери в статоре при холостом ходе [1,стр.209]:
 Вт,
Вт,
тогда:
 А,
А,
тогда ток холостого хода двигателя [1,стр.209]:
 А
А
Коэффициент мощности при холостом ходе [1,стр.209]:
 .
.
2.7 РАСЧЁТ РАБОЧИХ ХАРАКТЕРИСТИК
Рабочими характеристиками асинхронных двигателей называют зависимости P1, I1, cosj, h,s1=f(P2). Рабочие характеристики можно рассчитать по круговой диаграмме или аналитическим методом. Расчет по круговой диаграмме более нагляден, но менее точен, так как требует графических построений, снижающих точность расчета. Аналитический метод более универсален, позволяет учитывать изменение отдельных параметров при различных скольжениях. Расчет характеристик проводят, задаваясь значениями скольжений в диапазоне s = (0,2…1,5)sном. Номинальное скольжение можно предварительно взять при sном=r’2*. Для построения характеристик достаточно рассчитать значения требуемых величин для пяти-шести различных скольжений, выбранных в указанном диапазоне примерно через равные интервалы.
2.7.1 Сопротивление схемы замещения [1,стр.205]:
 Ом.
Ом.
2.7.2 Сопротивление взаимной индукции обмоток статора [1,стр.205]:
 Ом,
Ом,
Активная и реактивная составляющая коэффициента С1 определяется по [1, с. 210]

 градусов
градусов  < 1 градуса.
< 1 градуса.
2.7.3 Активная составляющая тока синхронного холостого хода замыкания
[1,стр.211]:
 А.
А.
2.7.4 Коэффициенты для расчёта пусковых характеристик [1,с.211]:
Если  , то можно использовать приближенный метод, так как в этом случае
, то можно использовать приближенный метод, так как в этом случае



 Ом
Ом


 Ом
Ом
Потери, не изменяющиеся при изменении скольжения:
 Вт.
Вт.
Рассчитываем рабочие характеристики для сколь