Общие положения.
Скорость вращения ротора асинхронного двигателя
Способы регулирования скорости вращения асинхронных двигателей, согласно выражению (28-3), можно подразделить на два класса: 1) регулирование скорости вращения первичного магнитного поля
что достигается либо регулированием первичной частоты flt либо изменением числа пар полюсов р двигателя; 2) регулирование скольжения двигателя s при пх — const. В первом случае к. п. д. двигателя остается высоким^ а во втором случае к. п. д. снижается тем больше, чем больше s, так как при этом мощность скольжения (см. § 24-5)
теряется во вторичной цепи двигателя (мощность скольжения используется полезно только в каскадных установках — см. § 28-3).
Рассмотрим здесь главнейшие способы регулирования скорости вращения.
Регулирование скорости изменением первичной частоты (частотное регулирование) требует применения источников питания с регулируемой частотой (синхронные генераторы с переменной скоростью вращения, ионные или полупроводниковые преобразователи частоты и др.)- Поэтому данный способ регулирования используется главным образом в случаях, когда для целых групп двигателей необходимо повышать (п > 3000 об/мин) скорости вращения (например, ручной металлообрабатывающий инструмент, некоторые механизмы деревообрабатывающей промышленности и др.) или одновременно и плавно их регулировать (например, двигатели рольгангов мощных прокатных станов и др.). С развитием полупроводниковых преобразователей все более перспективным становится также индивидуальное частотное регулирование скорости вращения Двигателей. Схему короткозамкнутого асинхронного двигателя с частотным управлением при помощи полупроводниковых преобразователей можно получить, если на схеме рис. 11-14 заменить явно-полюсный ротор на ротор с обмоткой в виде беличьей клетки и питать эту схему от сети переменного тока через полупроводниковый выпрямитель. Управление инвертором при этом производится особым преобразователем частоты вне зависимости от положения ротора двигателя. Величина напряжения регулируется с помощью выпрямителя.
Если пренебречь относительно небольшим падением напряжения в первичной цепи асинхронного двигателя, то
Существенное изменение величины потока Ф при регулировании п нежелательно, так как увеличение Ф против нормального вызывает увеличение насыщения магнитной цепи и сильное увеличение намагничивающего тока, а уменьшение Ф вызывает недоиспользование машины, уменьшение перегрузочной способности и увеличение тока /2 при том же значении М [(см. равенство (25-11)] и т. д. Поэтому в большинстве случаев целесообразно поддерживать Ф = = const. При этом из соотношения (28-6) следует, что одновременно с регулированием частоты пропорционально ей необходимо изменять также напряжение, т. е. поддерживать
Отступление от этого правила целесообразно только в случаях, когда Мст быстро уменьшается с уменьшением п (например, приводы вентиляторов, когда М„ = п2). В этом случае более быстрое уменьшение Ux по сравнению с /L вызывает уменьшение Ф и улучшает энергетические показатели двигателя (cos фх и к. п. д. — см. § 29-7)

и в то же время уменьшение Мт с точки зрения перегрузочной способности не опасно.
При широком диапазоне регулирования правильнее поддерживать
O = £1/f1 = const.
К недостаткам частотного регулирования относится громоздкость и высокая стоимость питающей установки.
Регулирование скорости изменением числа пар полюсов р используется обычно для двигателей с короткозамкнутым ротором, так как при этом требуется изменять р только для обмотки статора. Изменять р можно двумя способами: 1) применением на статоре нескольких обмоток, которые уложены в общих пазах и имеют разные числа пар полюсов р; 2) применением обмотки специального типа, которая позволяет получить различные значения р путем изменения (переключения) схемы соединений обмотки. Предложено значительное количество различных схем обмоток с переключением числа пар полюсов, однако широкое распространение из них получили только некоторые. Применение нескольких обмоток невыгодно, так как при этом из-за ограниченного места с пазах сечение проводников каждой из обмоток нужно уменьшать, что приводит к снижению мощности двигателя. Использование обмоток с переключением числа пар полюсов вызывает усложнение коммутационной аппаратуры, в особенности, если с помощью одной обмотки желают получить более двух скоростей вращения. Несколько ухудшаются также энергетические показатели двигателей.
Двигатели с изменением числа пар полюсов называются много-скоростными, Обычно они выпускаются на 2, 3 или 4 скорости вращения, причем двухскоростные двигатели изготовляются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении р2: pt = 2: 1, трехскоростные двигатели — с двумя обмотками на статоре, из которых одна выполняется с переключением Рг : Pi = 2: 1, четырехскоростные двигатели — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Например, двигатель на /х = 50 гц с синхронными скоростями вращения 1500/1000/750/500 об/мин имеет одну обмотку с переключением на 2р = 4 и 8 и другую обмотку с переключением на 2р = 6 и 12.
Многоскоростные двигатели применяются в металлорежущих и деревообрабатывающих станках, в грузовых и пассажирских лифтах, для приводов вентиляторов и насосов и в ряде других случаев.
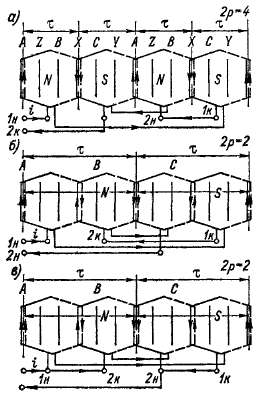
Каждая фаза обмотки с переключением числа пар полюсов в отношении 2: 1 (рис. 28-5) состоит из двух частей, или половинок, с одинаковым количеством катушечных групп в каждой части.
Когда обе части обмотки обтекаются токами одинакового направления, обмотка создает магнитное поле с большим числом полюсов (рис. 28-5, а, 2р = 4), а при изменении направления тока в одной части обмотки на обратное число полюсов уменьшается вдвое (рис. 28-5, б и в, 1р = 2). Подобные переключения производятся во всех фазах одновременно, и переключаемые части обмотки могут
соединяться последовательно (рис. 28-5, а и б) или параллельно (рис. 28-5, в).
Ширина фазной зоны, занимаемой сторонами катушек катушечной группы, и величина шага обмотки в зубцовых делениях одинаковы при обоих числах полюсов. Поскольку, однако, при переключении числа пар полюсов в отношении 2: 1 полюсное деление изменяется в два раза, то величина • фазной зоны в электрических градусах и относительный шаг обмотки при этом также изменяются в два раза.
Переключаемую обмотку выполняют так, что при меньшем числе пар полюсов {р^ фазная зона а = 60° эл. Тогда при удвоенном числе пар полюсов (р2 = 2рх) ширина этой зоны, будет а = 120° эл. Нормальные чередования фазных зон при одинаковом направлении вращения магнитного поля для обеих скоростей вращения должны быть
такими, как показано на рис. 28-6. Из рисунка видно, что, кроме изменения направлений токов в зонах X, Y, Z (рис. 28-6, а) на обратные (т. е. обращение их в зоны А, В, С), для сохранения направления вращения поля, а следовательно, и ротора при переключении числа пар полюсов (рис. 28-6, б) необходимо также переключить концы двух фаз обмотки (например, фазы В и С).
Обмотка выполняется так, что ее шаг равен полному (180° эл.) при большем числе полюсов (2р2), так как кривая н. с. обмотки с зоной а = 120° наиболее близка к синусоидальной при полном шаге. Тогда при меньшем числе полюсов относительный шаг |J = = 0,5.
Рис. 28-5. Принципиальные схемы
одной фазы обмотки с переключением
числа полюсов: а — при 2р = 4;
б, в — при 2р = 2
Из сказанного следует, что обмотка с переключением числа по-люсо'в создает н. с. с большей величиной высших гармоник поля, чем нормальная трехфазная обмотка с а = 60° и р = 5/в. Это приводит к некоторому ухудшению энергетических показателей двигателей с переключением числа полюсов по сравнению с нормальными.
На рис. 28-7 и 28-8 представлены наиболее часто употребляемые схемы обмоток с переключением числа пар полюсов в отношении р2 ■" pi = 2: 1. Определим мощности и моменты, развиваемые двигателями с такими схемами обмоток при неизменном линейном напряжении сети Un и наибольшем допустимом (номинальном) токе в полуфазе обмотки /ф. Пренебрегая разницей в условиях охлаждения при изменении скорости вращения, можно принять, что величина /ф одинакова при обеих скоростях вращения. Приближенно
Рис. 28-6. Чередование фазных зон обмотки с переключением полюсов в отношении 1: 2
Рис. 28-7. Принципиальная схема соединений обмотки с переключением числа полюсов в отношении 2: 1 при постоянном моменте
Рис. 28-8. Принципиальная схема соединений обмотки с переключением числа полюсов в отношении 2: 1 при постоянной мощности
можно считать, что коэффициенты мощности и к. п. д. при одинаковых значениях /ф для обеих скоростей вращения также одинаковы. При указанных условиях мощности на валу для схем рис. 28-7, а и б соответственно равны:




Таким образом,
и, следовательно, при переходе of меньшей скорости вращения (рис. 28-7, а) к большей (рис. 28-7, б) допустимая мощность на валу увеличивается в два раза. Момент вращения при этом, очевидно, остается постоянным, и поэтому схема переключения Y/YY (рис.28-7) называется также схемой переключения,с М = const. При схемах рис. 28-8, а и б имеем соответственно:
Обычно при использовании схемы рис. 28-8 для обеих скоростей вращения указывается.одинаковая номинальная мощность, т. е*>
принимается, что Pi = Л% Схема переключения Д/Кк (рис 28-8) называется также; схемой переключения с Р *4 — const.
Вид механических харак* тертетик двигателей cq cxe| мами обмоток рис. 28-7 и 28^1 изображен на рис. 28-9.
При переключении ышоЩ, скоростной, обмотки магни*?
нще индукции на отдельных участках магнитной цепи в обще*| случае изменяются, что необходимо иметь в виду при проектирован нии Двигателя, чтобы, с одной стороны, добиться по возможности более полного использования материалов двигателя» а с другой^ не допустить чрезмерного насыщения магнитной, цеди.
Вес и стоимость многоекороетнш двигателей несколько больше^ чемг у нормальных асинхронных двигателей такой же мощности/ Тем не менее это лучший и наиболее широко применяемый сносок регулирования скорости "короткозамкнувдх двигателей.
Регулирование скорости уменьшением величины первичного напряжения. При уменьшении Ux момент двигателя ^змеияется пропорционально Щ я соотйелгственво ваменяются механические ка^актеристики (рис. 28-10), в результате чего, наменяйтся также значения рабочих скольжений su\, s3... при данном виде зависимости Л1„ = / (s). Очевидно, что регулирование s в этом случае во»? можно в нределйх 0 < s < Sm. Для получения достаточно большого



диапазона регулирования скорости необходимо, чтобы активное сопротивление цепи ротора и соответственно sm были, достаточно велики (рис. 28-10, б).
Рис. 28-10. Механические характеристики асинхронных двигателей при различных величинах первичного напряжения
Следует учитывать, что во вторичной цепи возникают потери, равные мощности скольжения Ps и вызывающие повышенный нагрев ротора.
Этот метод регулирования скорости применяется также для двигателей с фазным ротором, причем в этом случае в цепь ротора включаются добавочные сопротивления.
В связи с пониженным к. п. д. и трудностями регулирования напряжения рассматриваемый метод.йршеняется только для двигателей малой мощности. При этом для регулирования Ut можно использовать регулируемые автотрансформаторы или сопротивления, включенные последовательно в первичную день, В последние годы для этой цели все чаще применяют (рис, 28-11) реакторы насыщения, регулируемые путем додмагничивания постоянным током (см. § 18-4). При изменении величины постоянного тока подмагничива-ния индуктивное сопротивление реактора изменяется, что
приводит к изменению напряжения на зажимах -двигателя. Путем автоматического регулирования тока подмагничивания можно расширить зону регулирования скорости в область s > sm и получить при этом жесткие механические характеристики.

Рис. 28-11. Схема регулирования асинхронного двигателя с помощью реактора с под1-магничиванием постоянным током
Рис. 28-12. Схема импульсного регулирования скорости вращения асинхронного двигателя


Импульсное регулирование скорости (рис. 28-12) производится путем периодического включения двигателя в сеть и отключения его от сети или путем периодического шунтирования с помощью контактора К сопротивлений, включенных последовательно в цепь статора, или полупроводниковых вентилей. При этом двигатель беспрерывно находится в переходном режиме ускорения или замедления скорости вращения ротора и в зависимости от частоты и продолжительности импульсов работает с некоторой, приблизительно постоянной скоростью вращения. Подобное регулирование скорости применяется только для двигателей весьма малой мощности (Рн < 30 -т- 50 в/п).
Более подробно некоторые вопросы регулирования скорости вращения асинхронных двигателей рассматриваются в курсах электропривода.