Рассмотрим двигатель ДПМ. Микродвигатели постоянного тока серии ДПМ являются 2-х полюсными электромашинами с возбуждением от постоянных магнитов.
Корпус состоит из литого постоянного магнита (3) цилиндрической формы, к торцевым частям которого прилиты, выполненные из цинкового сплава концевые части (2) и (5). В концевом приливе (5) есть окна для доступа к щеткодержателям, закрытые пружинящей защитной лентой. К корпусу винтами крепятся подшипниковые щиты (1) и (7). В эти щиты залиты стальные втулки, предназначенные для установки шарикоподшипников. К (7) жестко крепится суппорт (6) со щеткодержателями, он имеет овальные пазы для регулирования положения щеток и установки их на нейтрале (4). Якорь двигателя, состоит из вала, выполненного из нержавеющей стали, на валу 2 радиальных однорядных шарикоподшипника (8). Регулировка величины осевого люфта производится регулировочными шайбами (9). (10) – маслозащитная шайба для предотвращения попадания смазки из шарикоподшипника на коллектор.

Рис.1.2. Принципиальная схема.
Используется якорный способ управления.
Двигатель ДПР аналогичен ДПМ с небольшим отличием: корпус электродвигателя является одновременно магнитопроводом, представляет цилиндр, выполненный из магнитомягкой стали, к корпусу с помощью винтов крепится подшипниковый щит (10) и индуктор. Индуктор состоит из постоянного магнита (5) цилиндрической формы, втулки (13) из нержавеющей стали, Якорь (6) – полый, бескаркасный, он состоит из вала, коллектора с обмоткодержателем и обмотки якоря.
Якорь серии ДПР не содержит активной стали, а, следовательно, не имеет магнитных потерь, кроме того, благодаря отсутствию в якоре стали, условия коммутации в серии ДПР более благоприятное, чем в электродвигателях классической конструкции. Размещение постоянных магнитов внутри якоря обеспечивает лучшее использование магнитной энергии постоянных магнитов ввиду резкого снижения потоков рассеяния. Используется якорный способ управления.
У двигателя типа СЛ используется электромагнитное возбуждение. Управлять работой двигателя можно 2мя способами: якорным и полюсным. Чаще используют якорный способ, т.к. при этом способе управления регулировочная хар-ка линейна.
24. основные явления, протекающие в электрической подсистеме электромеханической системы: эл. подсистема состоит из эл. контуров, являющихся замкнутой эл. цепью. В общем случае в цепь входят: источник сигнала, обмотка эл-мех устройства и дополнительные элементы, обеспечивающие нормальную работу цепи. Процессы в эл. цепях характеризуются изменением токов. Эти процессы инерционны согласно закону электромагнитной индукции и сопровождаются рассеянием энергии (нагрев). Зависят от характеристик механической подсистемы, так как при движении мех. звена в эл. цепи наводится ЭДС пропорциональная скорости перемещения подвижных частей
34. Что отражают приведенные соотношения: 
Процессы протекающие в механической подсистеме ЭМС при вращательном движении.
Первое слагаемое-момент сил инерции, второе-момент вязкого трения, третье-момент пружины.
44. Что отражают приведенные соотношения: 
Выражение для коэнергии.
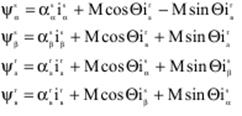
54. Что отражают приведенные соотношения 
Выражение для магнитной энергии обобщенной ЭЛМ с развернутым потокосцеплением обмоток