МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение
Высшего профессионального образования
УЛЬЯНОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра: Электропривод и АПУ
Дисциплина: Компьютерные технологии
ЛАБОРАТОРНАЯ РАБОТА № 3
Тема: «Разработка и исследование учебных программ на языке LD для управления электроприводом постоянного тока в комплексе CoDeSys»
Выполнили студенты:
Группы ЭАбзу-
Проверил доцент:
Горбунов А.А.
Ульяновск
Цель работы:
1. Изучение типовых релейно-контактных схем управления электроприводом постоянного тока.
2. Освоение методики формирования и исследования управляющих программ на языке LD.
3. Получение практических навыков разработки в среде CoDeSys.
Система управления, обеспечивающая пуск электропривода постоянного тока в функции времени и его остановку.
Структура системы управления
Силовая часть электропривода
Статические и динамические характеристики электропривода
1.1.
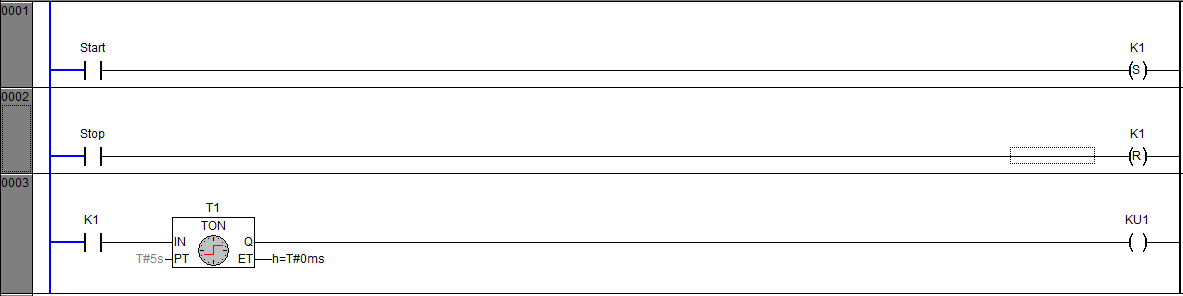
Программа управления ДПТ
1.3. Контактор К1 срабатывает при нажатии кнопки «Старт», встает на самоблокировку и своим контактом, через TON – таймер, с выдержкой времени включает контактор ускорения KU1. TON – таймер используется для шунтирования пускового резистора после разгона двигателя.
А.
Программа управления ДПТ с использованием RS-триггера
RS – триггер необходим для того, чтобы при отпускании кнопки «Старт» контактор К1 оставался под напряжением. Для того, чтобы установить RS – триггер необходимо подать сигнал на вход «SET», а для того, чтобы сбросить – на вход «RESET». При одновременном нажатии кнопок «Старт» и «Стоп» двигатель не запустится, потому что триггер будет сброшен.
|
|
Б.
Программа управления ДПТ с использованием SET и RESET обмоток
В данной схеме одновременное нажатие кнопок «Старт» и «Стоп» запрещено
Система управления, обеспечивающая пуск ДПТ с НВ в три ступени в функции времени и динамическое торможение в функции времени
Структура системы управления
Силовая часть электропривода
Программа управления ДПТ
2.2. Время динамического торможения определяется разностью временной выдержки таймеров Т-3 и Т-4.
2.3. Контактор К1 включается при нажатии кнопки «Старт» и отключается при нажатии кнопки «Стоп». Контактор KU1 включается при включенном контакторе К1 и после выдержки времени TON – таймера Т1. Контактор KU2 включается при включенных контакторах К1 и KU1 и после выдержки времени TON – таймера Т2. Контакторы КU1 и KU2 отключаются при нажатии кнопки «Стоп» и отключении контактора К1. Контактор KD включается при включенном виртуальном реле RT, нажатии кнопки «Стоп» и после выдержки времени TON – таймера Т4. Время динамического торможения определяется разностью выдержки времени таймеров Т3 и Т4. Виртуальное реле RT используется для того, чтобы после остановки двигателя отключить сопротивление Rд от цепи якоря.
Система управления, обеспечивающая пуск и реверс ДПТ с НВ в две ступени в функции времени, а также динамическое торможение в функции времени.
Структура системы управления
|
|
Силовая часть электропривода
3.1.
Программа управления ДПТ
3.3. Контактор К1 срабатывает при нажатии кнопки «Вперед» и при условии, что отключен контактор К2. Контактор К2 срабатывает при нажатии кнопки «Назад» и при условии, что отключен контактор К1. Контактор КU срабатывает при включении контактора К1 или К2 и с выдержкой времени TON – таймера Т1. Контактор KD срабатывает при работающем виртуальном реле RT, при отключенных контакторах К1 и К2 и с выдержкой времени на TON – таймере Т3. Контакторы К1 и К2 отключаются кнопкой «Стоп». Контактор KU отключается при выключенных контакторах К1 и К2. Контактор KD отключается при отключении виртуального реле RT. Время действия динамического торможения определяется разностью выдержки времени на таймерах Т2 и Т3.
3.4. В данной схеме при одновременном нажатии кнопок «Вперед» и «Назад» двигатель запустится вперед, если поменять цепи 0001 и 0002 местами, то при одновременном нажатии кнопок «Вперед» и «Назад» двигатель запустится назад.
Вывод: В данной лабораторной работе мы разработали и исследовали учебные программы на языке LD для управления электроприводом постоянного тока в комплексе CoDeSys. Данный комплекс достаточно прост и понятен для программирования логических контроллеров.