Лабораторная Работа 4
Исследование импульсных регуляторов скорости вращения двигателей постоянного тока
Цель работы
Исследование переходных процессов в замкнутой системе автоматического регулирования скорости вращения двигателей постоянного тока (ДПТ) с импульсным регулятором.
Методические указания
Изучите рекомендации по разработке и исследованию математических моделей электрических цепей и машин в среде Matlab/Simulink
Содержание работы
Исследование переходного процесса при пуске ДПТ с импульсным регулятором скорости вращения и заданных значениях скорости вращения, момента сопротивления движению и максимально допустимого тока якоря.
Исследование переходного процессав замкнутой системе автоматического регулирования скорости вращения ДПТ с импульсным регулятором при изменении момента сопротивления движению.
Исследование переходного процессав замкнутой системе автоматического регулирования скорости вращения ДПТ с импульсным регулятором при увеличении заданной скорости вращения.
Описание модели
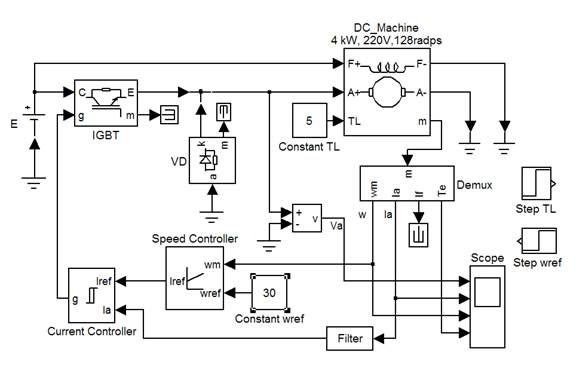
Рис.3.1. Схема модели импульсного регулятора скорости вращения ДПТ
Модель замкнутой системы автоматического регулирования скорости вращения ДПТ с импульсным регулятором содержит следующие блоки из библиотек Simulink и SimPowerSystem:
· блок DC Machine с обмоткой якоря +А, -А, обмоткой возбуждения +F, -F, входом TL ввода момента сопротивления движению и выходом т вывода результатов моделирования из SimPowerSystem/Machine;
· источник постоянного напряжения DC Voltage Sourse (E ) для питания обмотки якоря и обмотки возбуждения ДПТ из SimPowerSystem/Electrical Sources;
· исполнительный органимпульсного регулятора скорости IGBT и защитный диод VD из SimPowerSystem/Power Electronic ;
· заземлитель Ground из Simulink/SimPowerSystems/Connectors;
· блоки Constant TL и Step TL генерации постоянного и ступенчатого сигнала момента сопротивления движению из Simulink/Sources;
· блоки Constantwref и Step wref генерации постоянного и ступенчатого сигнала заданной скорости вращения из Simulink/Sources;
· блок Demux из SimPowerSystem/Machines для разделения результатов моделирования машини вывода текущих значений скорости вращения ротора ω, тока якоря ia и электромагнитного момента на валу двигателя Te.
· блок Voltage Measurement из SimPowerSystem/Measurements для измерения мгновенного значения напряжения обмотки якоря ua;
· блок Scope для наблюдения мгновенных значений напряжения обмотки якоря ua, тока якоря ia, скорости вращения ротора ω и электромагнитного момента на валу двигателя Te.
· блок управления скоростью ДТП Speed Controller, сравнивающий на входах фактическую скорость вращения ωm с заданной ωref и вырабатывающий на выходе заданный ток якоря iref;
· блок управления током якоря Current Controller, сравнивающий на входахфактическое значение тока обмотки якоря ia с заданным iref и вырабатывающий на выходе сигналы управления ключом IGBT.
Исследование переходного процесса при пуске ДПТ и заданных значениях скорости вращения, момента сопротивления движению и максимально допустимого тока якоря.
Откройте таблицу параметров DC Machine и установите их в соответствии с данными Примера в работе psb_2ML (табл.3.1).
Таблица 3.1. Параметры DC Machine
| номинальная мощность Pn, Вт | |
| номинальное напряжение обмотки якоря Un, В | |
| номинальная скорость вращения якоря nn, об/мин | |
| номинальный кпд ηn , о.е. | 0.9 |
| номинальный ток якоря Ia n, A | 20.2 |
| номинальная угловая скорость вращения ωn, рад/с | 127.96 |
| номинальный электромагнитный момент Te.n, Н*м | 31.26 |
| номинальный момент сопротивления движению TL.n, Н*м | 28.13 |
| активное сопротивление цепи якоря Ra, Ом | 0.6 |
| индуктивность цепи якоря La, Гн | 0.012 |
| активное сопротивление цепи возбуждения Rf, Ом | |
| индуктивность цепи возбуждения Lf, Гн | |
| взаимная индуктивность между цепью якоря и цепью возбуждения двигателя Laf, Гн | 1.8 |
| момент инерции двигателя J, (кг*м^2) | 0.1 |
| коэффициент вязкого трения Bm, (Н*м*с) | 0.021 |
| сoulomb friction torque Tf, (Н*м) | 0.2 |
Установите режим работы модели:
· напряжение источника питания E=180+10*N,
· момент сопротивления движению TL1 = 5+N, (задайте в блоке Constant TL),
· скорость вращения ДПТ ωref1 = 30+N (задайте в блоке Constant wref),
· максимально допустимое значение тока якоря ILim = 30+2*N (задайте в блоке Speed Controller),
· диапазон изменения тока якоря IГист = 2+0,5*N (задайте в блоке Hysteresis Current Controller).
Войдите в окно Simulation/ Simulation parameter, установите время начала моделирования 0, конца моделирования 0.6, способ моделирования - с переменным шагом, метод расчета – ode 15s и запустите моделирование ►.
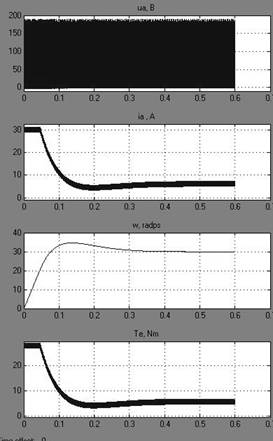
После завершения процесса откройте осциллоскоп Scope, включите «Автомасштаб » и убедитесь в том, что импульсный регулятор скорости обеспечивает плавный пуск ДПТ с ограничением пускового тока на заданном уровне и разгон ДПТ при неизменной нагрузке до заданной скорости (рис.3.2,а). При необходимости скорректируйте параметры блоков Speed Controller и Current Controller.
а) б)
Рис.3.2. Осциллограммы переходного процесса при пуске ДПТ
(Е=180 В, TL1 =5 Нм, ωref1=30 s-1, ILim = 30 A; IГист =2 A)
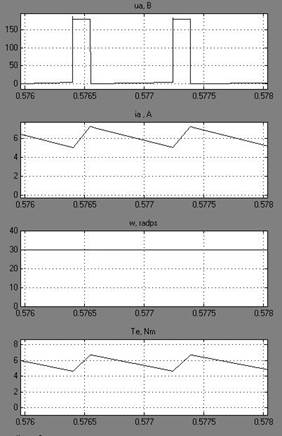
Нажмите кнопку «увеличить ось Х» и выделите часть осциллограммы в установившемся режиме работы 0.5<t<0.6, растяните шкалу времени так, чтобы видеть два-три периода работы регулятора. Нажмите кнопку «увеличить ось Y» и растяните осциллограммы по оси Y на все окно (рис.3.2,б).
При пуске скорость вращения ДПТ меньше заданной ωref1. Обмотка якоря получает питание от источника Е через включенный IGBT до тех пор, пока ток якоря не увеличится до заданного значения тока ограничения ILim. При этом блок Speed Controller дает команду на отключениеIGBTи отключение обмотки якоря от источника Е. Ток обмотки якоря за счет энергии магнитного поля сохраняется и продолжает протекать через диод VD. При уменьшении тока якоря на IГист блок Current Controller включает IGBT и процесс повторяется. Регулятор скорости работает в импульсном режиме, отключая IGBT и обмотку якоря от источника Е при
Iа ≥ ILim и вновь включая IGBT при Iа ≤ ILim - IГист.
После разгона ДПТ до скорости большей заданной ωref1 блок Speed Controller вырабатывает новое значение тока ограничения Iref1, соответствующее заданной скорости ωref1 и заданному моменту нагрузки TL1. Регулятор скорости работает в импульсном режиме, отключая IGBT и обмотку якоря от источника Е при Iа ≥ Iref1 и вновь включая IGBT при
Iа < Iref1 - IГист.
Перерисуйте осциллограммы ua(t), ia(t),ω(t), Te(t) на бланк. Определите минимальное, максимальное и среднее значения электромагнитного момента, минимальное, максимальное и среднее значения тока якоря, ток возбуждения, время пуска, время включенного состояния IGBT (длительность импульса ti), время отключенного состояния IGBT (длительность паузы tp), частоту работы регулятора f=1/(ti+ tp).
Рассчитайте для установившегося режима работы мощность потребляемую от источника питания P1=E*(Ia ср+IF)*ti/(ti+tp), мощность на валу двигателя P2 = Te ср *ω и кпд двигателя с импульсным регулятором
η =P2/P1 Результаты моделирования поместите в табл. 3.2.
Таблица 3.2. Результаты моделирования переходного процесса при пуске ДПТ.
| Результаты моделирования для интервала времени: | 0.5<t<0.6 | ||
| Te мин,Te макс, Te ср= (Te мин +Te макс)/2, Н·м | |||
| Ia мин, Ia макс, Ia ср = (Ia мин + Ia макс)/2 A | |||
| IF = E/RF A | |||
| Длительность пуска tП, ………………… c | |||
| Длительность импульса ti , c | |||
| Длительность паузы tp, c | |||
| Частота работы регулятора 1/(ti+ tp), с-1 | |||
| Мощность потребляемая P1=E*(Ia ср+IF)*ti/(ti+tp), Вт | |||
| Мощность на валу двигателя P2 = Te ср *ω, Вт | |||
| Кпд двигателя с импульсным регулятором η =P2/P1 |
Исследование переходного процесса в замкнутой системе автоматического регулирования скорости вращения ДПТ с импульсным регулятором при изменении момента сопротивления движению
Замените блок задания момента сопротивления движению Constant TL на блок Step TL и задайте его параметры:
· время шага 0.6,
· начальное значение TL1= 5+N,
· окончательное значение TL2= 20+N.
Войдите в окно Simulation/ Simulation parameter, установите время начала моделирования 0, конца моделирования 0.6, способ моделирования - с переменным шагом, метод расчета – ode 15s и запустите моделирование ►.
На интервале времени 0<t<0.6 переходный процесс протекает аналогично п.1, но через время шага 0.6 с блок Step TL скачком увеличит заданный момент сопротивления движению с начального значения TL1 = 5+N до окончательного значения TL2 = 20+N.
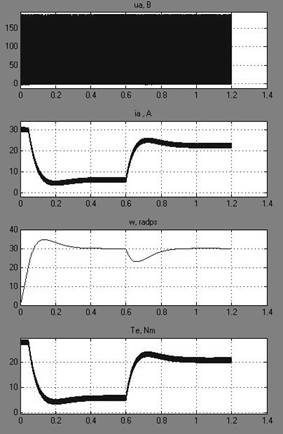
Перерисуйте осциллограммы переходного процесса для интервала времени 0.5<t<1.2 на бланк (рис.3.3,а).
Нажмите кнопку «увеличить ось Х » блока Scope и выделите части осциллограмм в установившемся режиме работы (1.1<t<1.2), растяните шкалу времени так, чтобы видеть два-три периода работы регулятора (рис.3.3,б).

а) б)
Рис.3.3. Осциллограммы переходных процессов при пуске и увеличении момента нагрузки ДПТ
При увеличении момента сопротивления движению скорость вращения ДПТ уменьшается wm<wref1 и блок Speed Controller вырабатывает новое значение тока ограничения Iref2, соответствующее заданной скорости ωref1 и заданному моменту сопротивления движению TL2. Регулятор скорости восстанавливает заданное значение скорости вращения ωref1, отключая IGBT и обмотку якоря от источника Е при Iа ≥ Iref2 и вновь включая IGBT при Iа < Iref2 - IГист.
Перерисуйте осциллограммы ua(t), ia(t),ω(t), Te(t) на бланк. Определите минимальное, максимальное и среднее значения электромагнитного момента, минимальное, максимальное и среднее значения тока якоря, ток возбуждения, время регулирования, время включенного состояния IGBT (длительность импульса ti), время отключенного состояния IGBT (длительность паузы tp), частоту работы регулятора f=1/(ti+ tp).
Рассчитайте для установившегося режима работы мощность потребляемую от источника питания P1=E*(Ia ср+IF)*ti/(ti+tp), мощность на валу двигателя P2 = Te ср *ω и кпд двигателя с импульсным регулятором
η =P2/P1 Результаты моделирования поместите в табл. 3.3.
Таблица 3.3. Результаты моделирования переходного процесса при увеличении момента сопротивления движению ДПТ
| . Результаты моделирования для интервала времени: | 1.1<t<1.2 | ||
| Te мин,Te макс, Te ср= (Te мин +Te макс)/2, Н·м | |||
| Ia мин, Ia макс, Ia ср = (Ia мин + Ia макс)/2 A | |||
| IF = E/RF A | |||
| Длительность переходного процесса tПП,…… c | |||
| Длительность импульса ti , c | |||
| Длительность паузы tp, c | |||
| Частота работы регулятора 1/(ti+ tp), с-1 | |||
| Мощность потребляемая P1=E*(Ia ср+IF)*ti/(ti+tp), Вт | |||
| Мощность на валу двигателя P2 = Te ср *ω, Вт | |||
| Кпд двигателя с импульсным регулятором η =P2/P1 |
Исследование переходного процесса в замкнутой системе автоматического регулирования скорости вращения ДПТ с импульсным регулятором при увеличении заданной скорости вращения
Замените блок задания скорости вращения Constant ωref на Stepωref и задайте его параметры:
· время шага 1.2,
· начальное значение ωref1= 30+N,
· окончательное значение ωref2= 80+N.
Войдите в окно Simulation/ Simulation parameter, установите время начала моделирования 0, конца моделирования 2, способ моделирования - с переменным шагом, метод расчета – ode 15s и запустите моделирование ►.
На интервале времени 0<t<1.2 переходный процесс протекает аналогично п.1, п.2, но через время 1.2 с блок задания скорости вращения Stepωref скачком увеличит заданную скорость вращения с начального значения ωref1 = 30+N до окончательного значения ωref2 = 80+N.
Перерисуйте осциллограммы переходного процесса для интервала времени 1< t <2 на бланк (рис.3.4,а).
Нажмите кнопку «увеличить ось Х » блока Scope и выделите части осциллограмм в установившемся режиме работы (1.7<t<1.8), растяните шкалу времени так, чтобы видеть два-три периода работы регулятора (рис.3.4,б).
При увеличении заданной скорости вращения до ωref2 фактическая скорость вращения ДПТ ωm меньше заданной. Обмотка якоря получает питание от источника Е через включенный IGBT до тех пор, пока ток якоря не увеличится до заданного значения тока ограничения ILim. Регулятор скорости работает в импульсном режиме, отключая IGBT и обмотку якоря от источника Е при Iа ≥ ILim и вновь включая IGBT при Iа ≤ ILim - IГист.
После разгона ДПТ до скорости большей заданной ωref2 блок Speed Controller вырабатывает новое значение тока ограничения Iref3, соответствующее заданной скорости ωref2 и заданному моменту нагрузки TL2. Регулятор скорости работает в импульсном режиме, отключая IGBT и обмотку якоря от источника Е при Iа ≥ Iref3 и вновь включая IGBT при
Iа < Iref3 - IГист.
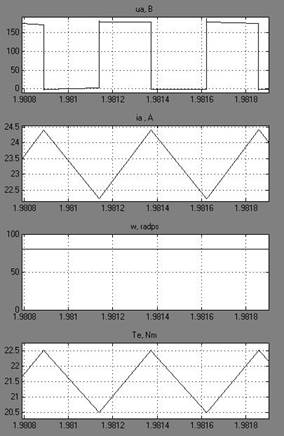
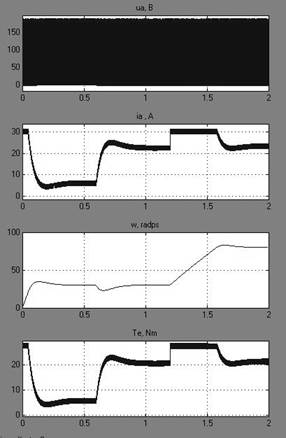
а) б)
Рис.3.4. Осциллограммы переходных процессов при пуске, увеличении момента нагрузки и увеличении заданной скорости вращения ДПТ
Перерисуйте осциллограммы ua(t), ia(t),ω(t), Te(t) на бланк. Определите минимальное, максимальное и среднее значения электромагнитного момента, минимальное, максимальное и среднее значения тока якоря, ток возбуждения, время регулирования, время включенного состояния IGBT (длительность импульса ti), время отключенного состояния IGBT (длительность паузы tp), частоту работы регулятора f=1/(ti+ tp).
Рассчитайте для установившегося режима работы мощность потребляемую от источника питания P1=E*(Ia ср+IF)*ti/(ti+tp), мощность на валу двигателя P2 = Te ср *ω и кпд двигателя с импульсным регулятором
η =P2/P1
Результаты моделирования поместите в табл. 3.4.
Таблица 3.4. Результаты моделирования переходного процесса при увеличении заданной скорости вращения ДПТ
.
| Результаты моделирования для интервала времени: | 1.9<t<2 | ||
| Te мин,Te макс, Te ср= (Te мин +Te макс)/2, Н·м | |||
| Ia мин, Ia макс, Ia ср = (Ia мин + Ia макс)/2 A | |||
| IF = E/RF A | |||
| Длительность переходного процесса tПП , c | |||
| Длительность импульса ti , c | |||
| Длительность паузы tp, c | |||
| Частота работы регулятора 1/(ti+ tp), с-1 | |||
| Мощность потребляемая P1, Вт | |||
| Мощность на валу двигателя P2, Вт | |||
| Кпд двигателя с импульсным регулятором η |