Задание для выполнения итоговой квалификационной работы
По ПМ 03 Эксплуатация систем автоматизации
Вариант 1-10
Выберите тип и определите оптимальные настроечные параметры регулятора, установленного на устойчивом объекте 1-го порядка с запаздыванием в соответствии с условиями соответственно вашему варианту:
| № варианта | Коэффициент передачи k0 | Постоянная времени Т0 | Время Запаздывания τ 0 | Вид типового переходного процесса | Динами-ческая ошибка регули-рования Y1доп | Статическая ошибка регулирования Yст.доп | Время регулир-ования tр.доп | Регулирующее воздействие Хв |
| 1,2 | с минимальной квадратичной площадью отклонения | 0,04 | 0,015 | 0,09 | ||||
| 0,9 | апериодический | 0,03 | 0,08 | 0,12 | ||||
| 1,1 | с 20% пере-регулированием | 0,02 | 0,075 | 0,1 | ||||
| 1,2 | апериодический | 0,04 | 0,06 | 0,15 | ||||
| 0,8 | с минимальной квадратичной площадью отклонения | 0,04 | 0,02 | 0,08 | ||||
| 1,2 | с 20% пере-регулированием | 0,04 | 0,015 | 0,1 | ||||
| 1,1 | апериодический | 0,04 | 0,015 | 0,12 | ||||
| 0,9 | с минимальной квадратичной площадью отклонения | 0,03 | 0,08 | 0,15 | ||||
| 0,95 | с 20% пере-регулированием | 0,04 | 0,15 | 0,09 | ||||
| 1,2 | с минимальной квадратичной площадью отклонения | 0,03 | 0,08 | 0,12 | ||||
| 1,1 | с 20% пере-регулированием | 0,04 | 0,015 | 0,09 |
Вариант 12-20
Выберите тип и определите оптимальные настроечные параметры регулятора, установленного на нейтральном объекте с запаздыванием в соответствии с условиями соответственно вашему варианту:
| № варианта | Время разгона Те | Время Запаз-дывания τ | Вид типового переходного процесса | Динами-ческая ошибка регули-рования Y1доп | Статическая ошибка регулирования Yст.доп | Время регулир-ования tр.доп | Регулирующее воздействие Хв |
| апериодический | 0,400 | 0,09 | 0,16 | ||||
| с 20% пере-регулированием | 0,185 | 0,08 | 0,14 | ||||
| с минимальной квадратичной площадью отклонения | 0,100 | 0,1 | 0,12 | ||||
| апериодический | 0,200 | 0,06 | 0,08 | ||||
| с 20% пере-регулированием | 0,118 | 0,02 | 0,09 | ||||
| с минимальной квадратичной площадью отклонения | 0,15 | 0,07 | 0,15 | ||||
| апериодический | 0,380 | 0,08 | 0,14 | ||||
| с 20% пере-регулированием | 0,139 | 0,09 | 0,11 | ||||
| апериодический | 0,330 | 0,06 | 0,12 |
Работа должна содержать:
1. Титульный лист.
2. Содержание.
3. Введение.
4. Виды регуляторов в зависимости от законов регулирования, область применения.
5. Выбор регулятора и определение настроечных параметров.
6. В конце работы необходимо построить алгоритм выбора регулятора(оформить приложением).
7. Заключение.
8. Список использованной литературы.
Введение
(Роль автоматического регулирования в промышленности)
Виды регуляторов в зависимости от законов регулирования, область применения.
2.1 Общая характеристика регуляторов (назначение и применение, классификация, достоинства и недостатки).
2.2 Настроечные параметры регуляторов.
2.3 Структурные схемы регуляторов.
Выбор типа регулятора согласно индивидуальному заданию.
Раздел должен содержать: индивидуальные данные (согласно выданному варианту), расчетные формулы и графические зависимости (графики необходимо начертить с использованием гр.редакторов с указанием выбранных точек), использованные для выбора регулятора и его настроечных параметров.
3.1 Ориентировочно характер действия регулятора определяют по величине отношения времени запаздывания объекта к его постоянной времени τ/Т0 (для нейтральных объектов вместо Т0 подставляют значениеТε):
Позиционный регулятор………………………….τ/Т0<0,2
Регулятор непрерывного действия……………….0,2<τ/Т0<1,0
Многоконтурная система регулирования………..τ/Т0>1,0
3.2 При выборе закона регулирования (типа регулятора) учитывают:
· свойства химико-технологического объекта;
· максимальную величину возмущения;
· принятый для данного технологического процесса вид типового переходного процесса;
· допустимые значения показателей качества процесса регулирования (динамическая ошибка у1доп; статическая ошибка уст.доп; время регулирования tр.доп).
Задача выбора закона регулирования имеет множественное решение. Протекание в конкретном объекте заданного переходного процесса, имеющего требуемые значения заданных параметров качества может обеспечено регуляторами разных типов. Целесообразно использовать регуляторы наиболее простых типов.
3.3 Выбор регулятора осуществляют в следующей последовательности:
· Сначала проверяют - сможет ли простейший регулятор обеспечить заданное качество регулирования. Если да, то переходят к определению параметров его настройки. Если нет, то последовательно рассматривают регуляторы, имеющие более сложные законы. Выбор заканчивают, когда найден регулятор, обеспечивающий заданное качество регулирования. Затем находят значение параметров настройки этого регулятора.
·  Подбор регулятора начинают с определения максимального динамического отклонения регулируемой величины в замкнутом контуре (у1-для устойчивых объектов; у1-для нейтральных). При этом должны соблюдаться условия
Подбор регулятора начинают с определения максимального динамического отклонения регулируемой величины в замкнутом контуре (у1-для устойчивых объектов; у1-для нейтральных). При этом должны соблюдаться условия
 у1<у1.допили у1<у1.доп (1)
у1<у1.допили у1<у1.доп (1)
где у1.доп – максимально допустимое в системе регулирования динамическое отклонение выходной величины.
· Для устойчивых объектов величина у1 определяется по равенству:
у1=Rдk0xв (2)
где Rд- динамический коэффициент регулирования в системах с устойчивыми объектами; k0- коэффициент передачи объекта по каналу регулирующего воздействия; xв- регулирующее воздействие, вызывающее такое же изменение регулируемой величины, как и максимальное возмущающее воздействие zmax.
Коэффициент Rд характеризует степень воздействия регулятора на объект; для устойчивых объектов его находят по равентсву:
Rд=у1/у0 (3)
где у0=k0xв – максимальное (динамическое) отклонение регулируемой величины устойчивого объекта при нанесении на него возмущающего воздействия zmax или регулирующего воздействия xв.
·  Для нейтральных объектов величина у1определяется по равенству:
Для нейтральных объектов величина у1определяется по равенству:

 у1=Rдxв (4)
у1=Rдxв (4)

 где Rд – динамический коэффициент регулирования в системах с нейтральными объектами. В данном случае коэффициент Rд определяют по уравнению:
где Rд – динамический коэффициент регулирования в системах с нейтральными объектами. В данном случае коэффициент Rд определяют по уравнению:
Rд=у1/ у0 (5)
где у0 =xв- динамическое отклонение регулируемой величины нейтрального объекта за время, равноеТεпри нанесении на объект регулирующего воздействияxв, эквивалентного максимально возможному возмущающему воздействию zmax.
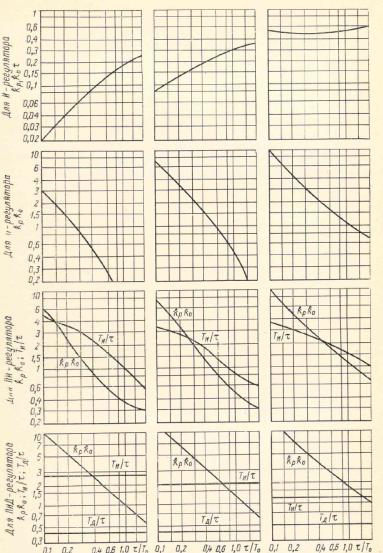
· В работе величины коэффициентов Rд и Rд, при которых в замкнутой системе обеспечивается протекание заданного типового переходного процесса, находят по графикам:
Динамические коэффициенты регулирования Rд устойчивых объектов:
а) б) в)

а) – аппериодический переходный процесс;
б) – с 20%-ным перерегулированием;
в) – с минимальной квадратичной площадью отклонения.
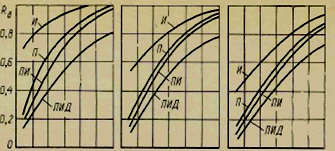
Динамические коэффициенты регулирования Rд нейтральных объектов:
 а) б) в)
а) б) в)

а) – аппериодический переходный процесс;
б) – с 20%-ным перерегулированием;
в) – с минимальной квадратичной площадью отклонения.
·  По значениям Rд илиRд определенным сначала для И – регулятора, по равенствам (2) или (4) вычисляют у1 или у1 и сравнивают их с допустимыми по условию (1). При удовлетворении этого условия И-регулятор проверяют на время регулирования tр. Если он не обеспечивает заданного динамического отклонения регулируемой величины в заданном контуре или необходимое время регулирования, то последовательно проверяют более сложные законы регулирования до удовлетворения условия (1). Важно, что для нейтральных объектов проверку начинают с П-регулятора.
По значениям Rд илиRд определенным сначала для И – регулятора, по равенствам (2) или (4) вычисляют у1 или у1 и сравнивают их с допустимыми по условию (1). При удовлетворении этого условия И-регулятор проверяют на время регулирования tр. Если он не обеспечивает заданного динамического отклонения регулируемой величины в заданном контуре или необходимое время регулирования, то последовательно проверяют более сложные законы регулирования до удовлетворения условия (1). Важно, что для нейтральных объектов проверку начинают с П-регулятора.
· В случае выбора П-регулятора дополнительно проверяют величину статической ошибки регулирования (уст – для устойчивых объектов или уст – для нейтральных) на соблюдение неравенства:
уст<уст.доп
уст<уст.доп
Статическую ошибку регулирования определяют по равенству:
для устойчивых объектов уст=уст * k0хв
для нейтральных объектов уст=уст * хв
Здесь у*ст и у*ст — относительные величины статической ошибки регулирования, равные соответственноуст или уст при k0=1 и xв=1. Значенияу*ст и у*ст находят по соответствующим графикам:
 Статические ошибки регулированияу*ст для устойчивых объектов:
Статические ошибки регулированияу*ст для устойчивых объектов:
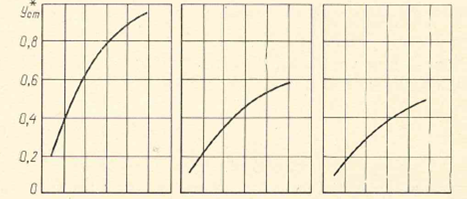

а б в
а) – аппериодический переходный процесс;
б) – с 20%-ным перерегулированием;
в) – с минимальной квадратичной площадью отклонения.

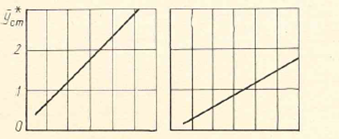 Статические ошибки регулированияу*ст для нейтральных объектов
Статические ошибки регулированияу*ст для нейтральных объектов
а б
а) – аппериодический переходный процесс;
б) – с 20%-ным перерегулированием.
Если полученное значение у*ст или у*ст превышает допустимое, то переходят к регуляторам, имеющим И-составляющую (ПИ- или ПИД-регуляторы).
· Проверку регуляторов на время регулирования tр выполняют в соответствии с условием: tр<tр.доп
где tр.доп-заданное максимально допустимое время регулирования.
Значения tр/ τ, при которых в системе обеспечивается протекание заданного типового переходного процесса, находят по графикам:
Время регулированияtр/ τ устойчивых объектов:
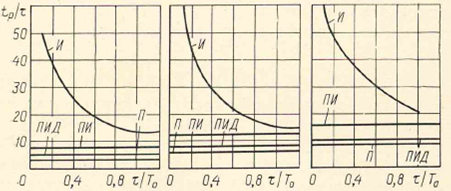
а б в
а) – аппериодический переходный процесс;
б) – с 20%-ным перерегулированием;
в) – с минимальной квадратичной площадью отклонения.
Время регулирования tр/ τ нейтральных объектов:
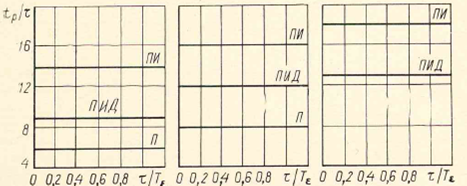
а б в
а) – аппериодический переходный процесс;
б) – с 20%-ным перерегулированием;
в) – с минимальной квадратичной площадью отклонения.
3.4. После выбора регулятора переходят к определению настроечных параметров регулятора.Оптимальные значения настроечных параметров регуляторов можно найти несколькими методами: организованным поиском, расчетным путем, а также по формулам или графическим зависимостям, полученным при моделировании АСР на вычислительных машинах.
· Организованный поиск позволяет находить оптимальные настроечные параметры регуляторов непосредственно из эксперимента, проводимого на действующей АСР. Это надежный, но трудоемкий путь. Кроме того, он осложнен тем, что на реальных объектах химической технологии не допускаются большие отклонения от значений, соответствующих заданному режиму.
· Расчетный метод заключается в составлении уравнения динамики системы и его решении относительно регулируемой величины при единичном ступенчатом возмущении. Затем, подставляя в полученное решение конкретные значения или различные комбинации параметров настройки регуляторов, получают несколько переходных процессов. Из них в качестве рабочего выбирают процесс, наименее отличающийся от заданного типового переходного процесса. Значения настроечных параметров регулятора, соответствующие выбранному процессу, принимают в качестве оптимальных. Однако, в связи со сложностью математического описания химико-технологических объектов и необходимостью просчета нескольких вариантов, что требует большого объема вычислений, этот метод применяется редко.
· Формулы или графические зависимости, полученные в результате математического моделирования АСР, также позволяют определить оптимальные значения настроечных параметров регуляторов; это наиболее часто используется на практике. Именно графическими зависимостями будем пользоваться для определения настроечных параметров.
 Настроечные кривые И-, П-, и ПИД-регуляторов в случае устойчивого объекта.
Настроечные кривые И-, П-, и ПИД-регуляторов в случае устойчивого объекта.
а б в
а) – аппериодический переходный процесс;
б) – с 20%-ным перерегулированием;
в) – с минимальной квадратичной площадью отклонения.
По осям абсцисс отложено отношение τ/Т0, а по осям ординат –значение настроечных параметров регуляторов. По графикам для И-регулятора сначала находят произведение величин, отложенное по оси ординат, а по нему вычисляют значение величины kр1 - условного коэффициента передачи: И-регулятора; kр1 характеризует скорость перемещения плунжера исполнительного устройства системы регулирования при постоянном значении отклонения текущего значения регулируемой величины от заданного. Для П-, ПИ- и ПИД-регуляторов по значению коэффициента передачи системы регулирования kc= kokp при известном значении ko находят коэффициент передачи регулятора kp. Значения времени интегрирования Tиb времени дифференцирования Tдна графиках приведены по, отношению к времени запаздывания объекта τ.
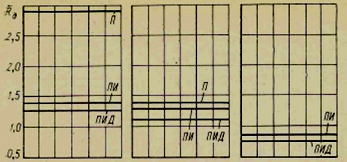
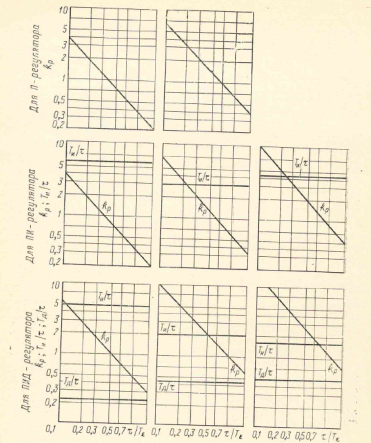 Настроечные кривые И-, П-, и ПИД-регуляторов в случае нейтрального объекта:
Настроечные кривые И-, П-, и ПИД-регуляторов в случае нейтрального объекта:
а б в
а) – аппериодический переходный процесс;
б) – с 20%-ным перерегулированием;
в) – с минимальной квадратичной площадью отклонения.
Коэффициент передачи регулятора kр определяют по графикам;время интегрирования Ти и Тд приведены на графиках по отношению ко времениτ.
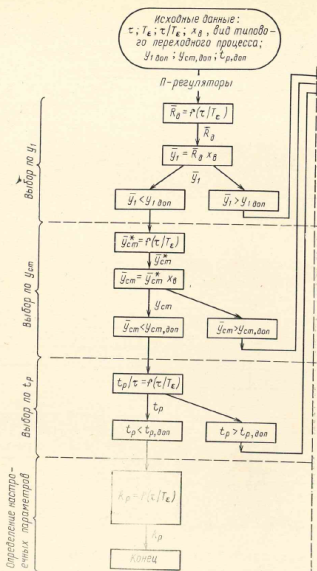
4. А лгоритм выбора регулятора.
Алгоритм должен раскрывать последовательность выбора закона регулирования и определения оптимальных значений параметров настройки регулятора на объектах. Алгоритм должен соответствовать индивидуальному заданию (отражать ход выполнения индивидуального задания).Графически алгоритм должен быть выполнен чисто, аккуратно, с использованием функциональных возможностей программ (MicrosoftOffice, графические редакторы).
Алгоритм выбора регулятора и его параметров на устойчивом объекте в общем виде выглядит так: (под каждой формулой подставляют свои числовые данные)
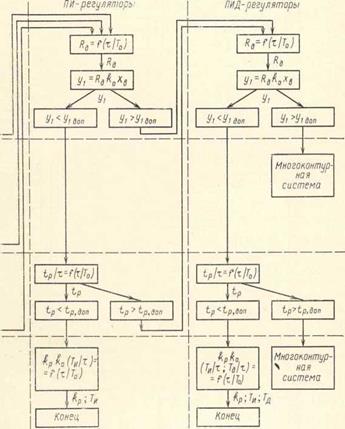
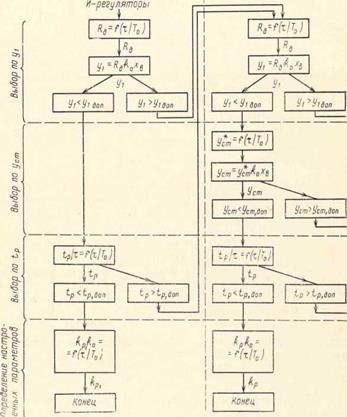
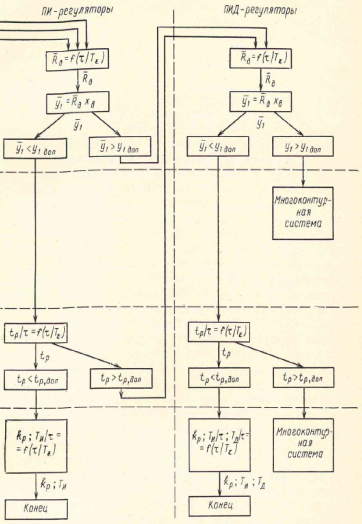
Алгоритм выбора регулятора и его параметров на нейтральных объектах в общем виде выглядит так: (под каждой формулой подставляют свои числовые данные)