3.1 Выполним синтез зубчатого механизма: при ведущем первом колесе, при ведущем водиле.
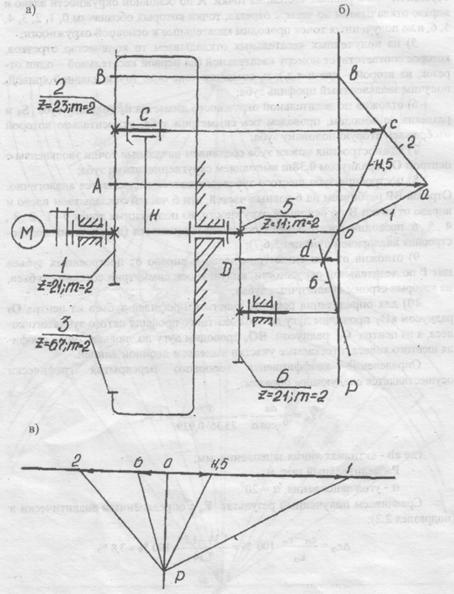
3.1.1 Ведущее первое колесо (рисунок 3).
|
а - кинематическая схема; б - план скоростей; в - план частот вращения
•
Рисунок 3 - Кинематический анализ зубчатого механизма при
ведущем первом колесе

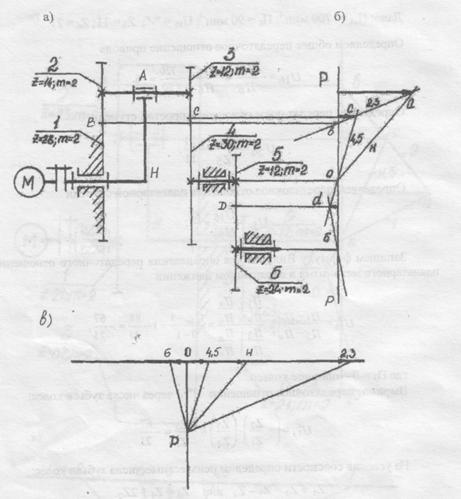
а - кинематическая схема; б - план скоростей; в - план частот вращения
Рисунок 4 - Кинематический анализ зубчатого механизма при ведущем водиле

Передаточное отношение планетарной ступени

Выбираем масштабный коэффициент построения плана скоростей

где Ра - отрезок, выражающий скорость точки А на чертеже (принимается от 40 до 80 мм).
Построение выполняем в следующей последовательности.
Проводим линию полюсов Р - Р и сносим на нее характерные точки механизма (А, В, С, D, О). От линии полюсов откладываем отрезок Ра, равный 49,5 мм, выражающий на чертеже скорость точки А. Так как закон распределения линейной скорости от радиуса колеса линейный, соединяем точки О и а и получаем линию Н распределения скоростей водила. Скорость точки В равна нулю (мгновенный полюс скоростей). Точки В и А принадлежат сателлиту, соединив их, получим линию распределения скоростей 2-3 колес сателлита. Сносим на эту линию точку С, принадлежащую сателлиту. Получим скорость этой точки, которая принадлежит также и четвертому колесу. Зная скорость точки С, принадлежащей четвертому колесу, а также скорость оси вращения (равна нулю) и соединив их, получим линию распределения скоростей четвертого и пятого колес. Сносим на эту линию точку D и определяем ее скорость. Точка D также принадлежит колесу 6. Соединив точку d и точку оси вращения шестого колеса, получим линию распределения скоростей этого колеса.
3.3 Построение плана частот вращения. Для построения плана частот вращения выбираем масштабный коэффициент построения:
Проводим горизонтальную линию и из точки О восстанавливаем перпендикуляр. От точки О в выбранном масштабе откладываем отрезок О-Н, равный 90 мм, выражающий частоту вращения водила (двигателя) на чертеже. Затем из точки Н проводим линию, параллельную линии скорости Н плана скоростей. На пересечении ее с перпендикуляром получим полюс построения Р. Из полюса проведем наклонные линии, параллельные линиям 6, 4-5, 2-3 плана скоростей, и получим отрезки на плане частот вращения 0-6, 0-4, 0-2, выражающие частоты вращения колес в миллиметрах. Для определения истинных величин частот умножим эти отрезки на масштабный коэффициент
Кп = 10 мин-1/мм.
Правильность построения проверим аналитическим расчетом частот вращения колес.
Частота вращения 4 и 5 колес

|
| Частота вращения сателлита |

|
| Пн = -900мин-1; П1 = 0; |

|
Расхождение результатов не должно превышать 5 %.
Список литературы
1 Филонов И.П. Теория механизмов, машин и манипуляторов /И.П. Филонов, П.П. Анципорович, В.К. Акулич. - Мн.: Дизайн ПРО, 1998. - 655 с.
2 Теория механизмов и машин /Под ред. К.В. Фролова. - М.: Высш. шк.,
1998.-494с.
3 Попов С.А. Курсовое проектирование по теории механизмов и машин.- М.: Высш. шк., 1986. - 294 с.
4 Алехнович В.Н. Теория механизмов и машин. Сборник контрольных
работ и курсовых проектов. - Мн.: Выш. шк., 1986. - 252 с.
5 Девойно Г.Н. Курсовое проектирование по теории механизмов и машин. - Мн.: Выш. шк., 1986.-285с.
6 ГОСТ 16532-70. Передачи зубчатые цилиндрические эвольвентные
внешнего зацепления. Расчет геометрии. - М.: Изд-во стандартов, 1971. -
42с.