Дисциплина: «Основы теории пилотажно-навигационных систем»
Преподаватель: Ползик Владимир Палладьевич.
Учебный год: 2019-2020. Семестр: 6.
Филиал «Стрела» МАИ. Кафедра: С-16. РПКБ. Группа: СО-302С-17
Специальность: 24.05.06 – «Системы управления ЛА».
Специализация: «Измерительно-вычислительные комплексы систем управления воздушно-космических ЛА»
| № | ФИО | 1. Орто, локсо | 2. Орто Меркатор | 3. Маршрут | |||||
| 1. | Белая Алина | ||||||||
| 2. | Джеломанова Валерия | ||||||||
| 3. | Зарубин Илья | ||||||||
| 4. | Кокорева Анастасия | ||||||||
| 5. | Морозова Екатерина | ||||||||
| 6. | Степанов Константин | ||||||||
| 7. | Федорова Елизавета | ||||||||
| 8. | Шарашин Александр |
Филиал «Стрела» МАИ. Кафедра: С-12. ЦАГИ. Группа: СО-304С-17
Специальность: 24.05.06 – «Системы управления ЛА».
Специализация: «Системы управления движением ЛА»
| № | ФИО | 1. Орто, локсо | 2. Орто Меркатор | 3.Маршрут | |||||
| 1. | Горенков Дмитрий | ||||||||
| 2. | Гранин Артур | ||||||||
| 3. | Джанумов Никита | ||||||||
| 4. | Канухин Георгий | ||||||||
| 5. | Ковалева Елизавета | ||||||||
| 6. | Корсакова Полина | ||||||||
| 7. | Максимов Игорь | ||||||||
| 8. | Матыцына Полина | ||||||||
| 9. | Новиков Александр | ||||||||
| 10. | Овчинников Илья | ||||||||
| 11. | Петрова Анастасия | ||||||||
| 12. | Пучков Дмитрий | ||||||||
| 13. | Рогачев Иван | ||||||||
| 14. | Рыбакова Марина | ||||||||
| 15. | Рыбин Максим | ||||||||
| 16. | Федюшин Владислав | ||||||||
| 17. | Ясев Даниил |
Практика 3. Расчёт времени полёта по маршруту.
Выполнить расчёт времени полёта по маршруту Т МРШ
Результат представить в отчёте Word, добавить в файл общего отчета под одним титульным листом..
Лекционный материал в предыдущем задании.
Пример исходных данных
Р ВПП = 740 мм.рт.ст. – давление на ВПП
V y1 = 5 м/с – вертикальная скорость
V y2 = 10 м/с – вертикальная скорость
Н ПЕР = 400 м – высота перехода
FL250 – высота эшелона
Н ЭШ.ПЕР = FL30
Q = 11 м/мм.рт.ст. – барическая ступень
V ЭШ = 700 км/ч – скорость на эшелоне
L ЭШ = 600 км – расстояние на эшелоне
Формулы для расчёта
| Н ВПП = (Р 0 – Р ВПП)* Q, м | Т 1 = Н ПЕР/ V y1, мин |
| Н ЭШ = 250*100*0,3048, м | Т 2 = Н НАБ/ V y2, мин |
| ННАБ = Н ЭШ – Н ВПП – Н ПЕР, м | Т ЭШ = L ЭШ/ V ЭШ, мин |
| НСНИЖ = Н ЭШ – Н ЭШ.ПЕР, м | Т 3 = Н СНИЖ/ V y2, мин |
| Н ЗАХ = Н ЭШ.ПЕР – Н ВПП, м | Т 4 = Н ЗАХ/ V y1, мин |
| Q = 11 м/мм.рт.ст. | Т МРШ = Т 1 + Т 2 + Т ЭШ + Т 3 + Т 4, мин |
| FL250 L ЭШ |
| Н ПЕР |
| Н ЭШ |
| V у1 |
| V у2 |
| Р ВПП |
| Н ВПП взлета |
| Н НАБ |
| Р 0 = 760 мм.рт.ст. |
| Н ЭШ.ПЕР |
| V у1 |
| V у2 |
| Р ВПП |
| Н ВПП посадки |
| Н СНИЖ |
| Н ЗАХ |
Выполнить расчёт по варианту.
Номер варианта – это номер ФИО по журналу посещения занятий.
| Параметр | Вариант | |||||||||
| Р ВПП взлета | ||||||||||
| Р ВПП посадки | ||||||||||
| V y1, м/с | 4,0 | 4,1 | 4,2 | 4,3 | 4,4 | 4,5 | 4,6 | 4,7 | 4,8 | 4,9 |
| V y2, м/с | 9,0 | 9,1 | 9,2 | 9,3 | 9,4 | 9,5 | 9,6 | 9,7 | 9,8 | 9,9 |
| LЭШ, км | ||||||||||
| VЭШ, км/ч | ||||||||||
| Н ПЕР, м | ||||||||||
| Н ЭШ,ПЕР | FL30 | FL40 | FL30 | FL40 | FL30 | FL40 | FL30 | FL40 | FL30 | FL40 |
| Н ЭШ | FL170 | FL180 | FL190 | FL200 | FL210 | FL220 | FL230 | FL240 | FL250 | FL260 |
| Параметр | Вариант | |||||||||
| Р ВПП взлета | ||||||||||
| Р ВПП посадки | ||||||||||
| V y1, м/с | 5,0 | 5,1 | 5,2 | 5,3 | 5,4 | 5,5 | 5,6 | 5,7 | 5,8 | 5,9 |
| V y2, м/с | 10,0 | 10,1 | 10,2 | 10,3 | 10,4 | 10,5 | 10,6 | 10,7 | 10,8 | 10,9 |
| LЭШ, км | ||||||||||
| VЭШ, км/ч | ||||||||||
| Н ПЕР, м | ||||||||||
| Н ЭШ,ПЕР | FL30 | FL40 | FL30 | FL40 | FL30 | FL40 | FL30 | FL40 | FL30 | FL40 |
| Н ЭШ | FL270 | FL280 | FL290 | FL300 | FL310 | FL320 | FL300 | FL310 | FL320 | FL310 |
Лекционный материал
Инерциальные навигационные системы
Принцип действия ИНС и счисление пути
Инерциальные навигационные системы (ИНС) – это технические средства, которые позволяют определять непосредственно на движущемся объекте его координаты и вектор путевой скорости в результате измерения и интегрирования ускорений, действующих на объект во время движения. Ускорения измеряются в инерциальной системе координат – неподвижной или движущейся прямолинейно и равномерно. А также ИНС позволяют определять угловые скорости и углы поворота связанной системы координат ЛА отностительно земной ситемы координат: крен, рысканье и тангаж.
ИНС наилучшим образом удовлетворяют целому комплексу таких важных требований, как универсальность, полная автономность, помехозащищенность и помехоустойчивость, а также скрытность работы.
Физические принципы инерциальной навигации неразрывно связаны с решением основной задачи динамики: при известных силах, действующих на тело, а так же его начальном положении и скорости необходимо определить его положение в любой момент времени относительно выбранной системы отсчета.
Решение этой задачи разбивают на два этапа:
· определение движения центра масс;
· определение движения тела вокруг центра масс.
Инерциальные навигационные системы относятся к системам счисления пути и имеют в своём составе датчики линейного ускорения (акселерометры) и датчики угловой скорости (гироскопы).
Акселерометр – прибор, измеряющий проекцию кажущегося ускорения, т.е. разность между истинным ускорением объекта и гравитационным ускорением. Акселерометр применяется для измерения проекций абсолютного линейного ускорения и, наравне с гироскопами, являются неотъемлемыми компонентами инерциальных систем навигации.
Для определения географических координат, акселерометр ориентирован в геоцентричекой инерциальной системе координат и измеряет ускорения axи, ayи, azи.
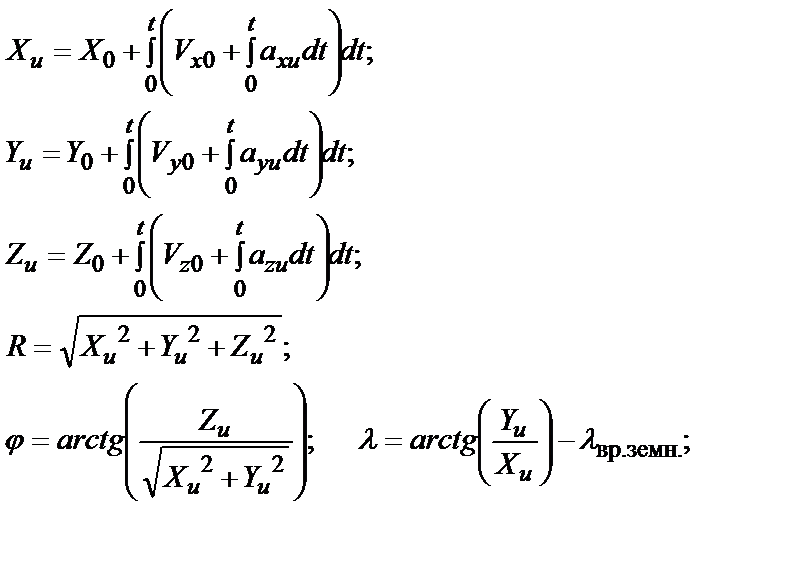
где даны параметры в геоцентрической системе координат:
X0, Y0, Z0 – начальные координаты ЛА;
Vx0, Vy0, Vz0 – начальные скорости ЛА;
R – радиус-вектор положения ЛА;
j – геоцентрическая широта;
l – геоцентрическая долгота;
lвр.земн – угол поворота Земли за время движения ЛА.
Для счисления пути относительно земной поверхности акселерометр должен располагаться строго в горизонтальной плоскости и ориентирован отностительно направления на Север.
При выполнении этих условий акселерометр измеряет ускорения по осям земной системы координат axg, ayg, azg.
Тогда счисление пути и вычисление проекций путевой скорости и координат выполняется в вычислителе ИНС по формулам:

Чувствительным элементом, непосредственно воспринимающим ускорение (ЧЭ), является сейсмическая масса. У акселерометров негироскопического типа сейсмическая масса выполняется в виде твердого тела. У акселерометров гироскопического типа сейсмической массой служит сам гироскоп.
Для самолетных систем в основном применяются акселерометры с чувствительным элементом, выполненным в виде твердого тела.
По характеру движения сейсмической массы различают акселерометры с поступательным и угловым ее перемещением. Акселерометры линейных ускорений с угловым перемещением сейсмической массы называются маятниковыми.
Для закрепления сейсмической массы в корпусе датчика применяются различные типы подвесов. Наиболее широкое распространение получили подвесы:
· на шарикоподшипниках;
· на пружинах и торсионах;
· на растяжках.
Существуют и другие подвесы: гидростатические, газостатические, электро-статические, электромагнитные и другие.
По количеству измеряемых одним акселерометром составляющих ускорения акселерометры делятся на:
· однокомпонентные (одноосевые);
· двухкомпонентные (двухосевые);
· трехкомпонентные (трехосевые).
Устройство и принцип действия датчика линейных ускорений рассмотрим на примере одноосевого акселерометра с пружинным подвесом сейсмической массы.
На рисунке отмечены:
1 – корпус;
2 – пружины подвеса;
3 –чувствительный элемент – сейсмическая масса;
4 – воздушный демпфер;
5 – потенциометрический преобразователь
Как видно из рисунка, чувствительный элемент 3 подвешен в корпусе прибора 1 при помощи пружин 2. Для демпфирования собственных колебаний чувствительного элемента используется воздушный демпфер 4. Выходной сигнал, пропорциональный измеренному ускорению, снимается с потенциометрического преобразователя 5. Осью чувствительности акселерометра является ось OX. На летательном аппарате ось чувствительности устанавливается параллельно той оси ЛА, относительно которой необходимо измерять ускорение.