Тахометрические датчики в своем большинстве являются датчиками угловой скорости. В случае прямолинейного движения измерение скорости часто также можно свести к измерению скорости вращения.
Промышленные датчики скорости базируются на законе Фарадея e= – dФ/dt. Поэтому всякое относительное перемещение между источником потока и контуром наводит в нем ЭДС, амплитуда которой пропорциональна скорости перемещения. Этот вид тахометрии называется электродинамическим.
Когда тело осуществляет периодическое движение, например вращение, измерение его скорости может быть заменено измерением частоты импульсов (диск на валу с прозрачными и непрозрачными частями). Такие тахометры называются импульсными.
В случае очень медленного вращения упомянутые выше методы не приемлемы. В этом случае измерение скорости может быть осуществлено с помощью лазерного гирометра, принцип действия которого основан на измерении изменения разности хода лучей в интерферометре.
Тахогенератор (ТГ) постоянного тока является электрической коллекторной машиной постоянного тока, работающей в генераторном режиме. Конструкция ТГ принципиально не отличается от конструкции генератора независимого возбуждения или двигателя постоянного тока и содержит статор, ротор и щеточно-коллекторный контакт (рис. 4.27, а).
При работе на холостом ходу (Iн=0) ЭДС якоря Ея пропорциональна магнитному потоку возбуждения и скорости вращения якоря Ея = сФ0ω = ктг0ω, где ктг0 = сФ0, а с – конструктивный коэффициент.
При подключении нагрузки со щеток снимается напряжение Uя = Eя – IяRц.я., где Iя – ток якоря; Rц.я. – сопротивление цепи якоря (обмотки и щеточно-коллекторного контакта).
Подставляя значение тока якоря Iя = Uя/Rя в выражение для Uя, получим:
Uя = Ея/(l + Rц.я./Rн) = ωктr0/(l +Rц.я./Rи) = ктгω.
На рис. 4.27, б показаны регулировочные характеристики ТГ при различных сопротивлениях нагрузки Rн.
 При протекании по обмотке якоря тока Iя возникает реакция якоря, которая уменьшает поток возбуждения до величины Ф=Ф0 – ФР, где Ф0 – магнитный поток возбуждения при Iя=0, Фр=крIя – размагничивающая составляющая реакции якоря. Тогда Ея=кω(Ф0 –Фр).
При протекании по обмотке якоря тока Iя возникает реакция якоря, которая уменьшает поток возбуждения до величины Ф=Ф0 – ФР, где Ф0 – магнитный поток возбуждения при Iя=0, Фр=крIя – размагничивающая составляющая реакции якоря. Тогда Ея=кω(Ф0 –Фр).
Сопротивление щеточно-коллекторного контакта зависит от Iя, но падение напряжения на нем Uщ = const. С учетом этих факторов напряжение, снимаемое с якоря, будет равно:
Uя = (ктroω - Uщ)/(1 + (ккрω + Rя)/ Rн).
Характеристика является нелинейной и имеет зону нечувствительности Δω, на рисунке показана штрихпунктирной линией.
Если размагничивающим фактором реакции якоря можно пренебречь, то есть принять кр=0, то характеристика будет линейной, а ктг = dUя/dω = ктго/(1 + Rя/Rн) = const.
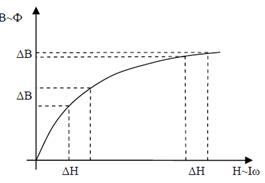 Еще один фактор нестабильности – это изменение потока возбуждения Ф из-за нагрева обмоток (Rв увеличивается) или колебаний напряжения возбуждения Uв. Для уменьшения влияния этих факторов магнитную систему ТГ выполняют с большим насыщением. Из рис. 4.28, на котором изображена кривая намагничивания ротора и статора, видно, что из-за одинаковой величины нестабильности ΔH изменение индукции ΔВ (и следовательно ΔФ) в насыщенной магнитной системе существенно меньше, чем в ненасыщенной.
Еще один фактор нестабильности – это изменение потока возбуждения Ф из-за нагрева обмоток (Rв увеличивается) или колебаний напряжения возбуждения Uв. Для уменьшения влияния этих факторов магнитную систему ТГ выполняют с большим насыщением. Из рис. 4.28, на котором изображена кривая намагничивания ротора и статора, видно, что из-за одинаковой величины нестабильности ΔH изменение индукции ΔВ (и следовательно ΔФ) в насыщенной магнитной системе существенно меньше, чем в ненасыщенной.
Недостатком насыщенной магнитной системы является невозможность изменения ктг за счет изменения тока возбуждения Iв.
Другим методом стабилизации магнитного потока является применение термочувствительных магнитных шунтов (МШ) (рис. 4.29).
 При увеличении температуры магнитное сопротивление шунтов увеличивается, и магнитный поток все более будет замыкаться через якорь, компенсируя уменьшение потока за счет разогрева обмоток возбуждения.
При увеличении температуры магнитное сопротивление шунтов увеличивается, и магнитный поток все более будет замыкаться через якорь, компенсируя уменьшение потока за счет разогрева обмоток возбуждения.
Можно получать поток возбуждения от постоянных магнитов. При этом устраняются причины указанных нестабильностей, но в этом случае нельзя изменять ктг.
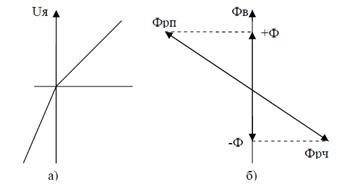
Асимметрия характеристики возникает из-за неточной установки щеток на геометрической нейтрали (рис. 4.30, а). Это приводит к тому, что продольная составляющая реакции якоря меняет знак при изменении направления вращения. Поток возбуждения в одном случае ослабляется, а в другом – усиливается (рис. 4.30, б). На рисунке Фрч – реакция якоря при вращении по часовой стрелке, Фрп – против.
Коэффициент асимметрии определяется выражением:
япячяпячUUUUA +⋅−⋅=%100)(2,
где Uяч,Uяп – напряжение на якоре при вращении по часовой стрелке и против. Допустимое значение А составляет 0,3 ÷ 1%.
Конструктивно ТГ выполняются с роторами трех типов: катушечными, полыми и дискоидальными роторами.
 ТГ с катушечными роторами имеют Uвых в несколько десятков вольт, но большая реакция якоря искажает характеристику, а большая индуктивность ухудшает быстродействие.
ТГ с катушечными роторами имеют Uвых в несколько десятков вольт, но большая реакция якоря искажает характеристику, а большая индуктивность ухудшает быстродействие.
Полый ротор образуется проволочной обмоткой на полом немагнитном цилиндре, вращающемся вокруг неподвижного сердечника.
Дискоидальные роторы выполняются по технологии печатных плат.
Полый и дискоидальный ротор характеризуются малым Uвых, но имеют малую реакцию якоря и индуктивность.
Достоинствами ТГ постоянного тока являются: отсутствие влияния фазного угла нагрузки ϕн на Uя и высокая линейность характеристики.
К нeдocтaткам можно отнести недолговечность скользящего контакта, радиопомехи из-за искрения под щетками, коллекторный шум выходного напряжения, сложность конструкции и, следовательно, высокую стоимость.