Детерминированные модели в непрерывном времени
Общий вид модели детерминированной системы, описываемой обыкновенным дифференциальным уравнением, определяется следующим образом:
где  – вектор состояния системы;
– вектор состояния системы;  – вектор возмущающих или управляющих внешних воздействий, зависимость которого от времени носит детерминированный характер; f()–заданная непрерывная функция своих аргументов. Подобная система является простой.
– вектор возмущающих или управляющих внешних воздействий, зависимость которого от времени носит детерминированный характер; f()–заданная непрерывная функция своих аргументов. Подобная система является простой.
Детерминированные модели в дискретном времени
Если  счетное множество моментов времени, то описание поведения системы в смысле изменения ее состояния осуществляется в дискретном времени. Аналогом обыкновенных дифференциальных уравнений в этом случае являются разностные уравнения (уравнения в конечных разностях). Общий вид разностных уравнений в различных обозначениях:
счетное множество моментов времени, то описание поведения системы в смысле изменения ее состояния осуществляется в дискретном времени. Аналогом обыкновенных дифференциальных уравнений в этом случае являются разностные уравнения (уравнения в конечных разностях). Общий вид разностных уравнений в различных обозначениях:

где  – значения соответствующих векторных величин в дискретные моменты времени; f() –непрерывная функция своих аргументов известного вида. Детерминированная линейная система описывается линейными разностными уравнениями вида
– значения соответствующих векторных величин в дискретные моменты времени; f() –непрерывная функция своих аргументов известного вида. Детерминированная линейная система описывается линейными разностными уравнениями вида

где  – матрицы соответствующей размерности.
– матрицы соответствующей размерности.
3) Стохастические модели в непрерывном времени
Реальные системы функционируют в условиях воздействия большого количества случайных факторов, которые, наряду с воздействиями контролируемого характера, оказывают влияние на поведение С. Для описания таких систем в непрерывном времени используются стохастические дифференциальные уравнения

где g(t,x) – матричная функция известного вида размера m×1, определяющая добавление стохастической составляющей;  – l -мерный случайный процесс типа белого шума с нулевым математическим ожиданием и ковариационной матрицей вида
– l -мерный случайный процесс типа белого шума с нулевым математическим ожиданием и ковариационной матрицей вида

где Q(t) – матричная функция размера l×1.
Линейная стохастическая система определяется уравнением, в котором к имеющейся детерминированной составляющей добавляется линейная стохастическая составляющая

где C(t)– матричная функция размера m×1.
Стохастические модели в дискретном времени
Формализованное описание систем в этой ситуации определяется
стохастическими разностными уравнениями вида

где  – независимая в дискретном времени центрированная гаусcовская последовательность
– независимая в дискретном времени центрированная гаусcовская последовательность 
Для линейной системы это уравнение преобразуется следующим образом:

2й Вариант
Кибернетический подход при описании систем.
Схема управления.
Кибернетический подход к описанию систем состоит в том, что всякое целенаправленное поведение рассматривается как управление.
Теория управления в широком смысле – это обобщение приемов и методов, накопленных разными науками об управлении искусственными объектами и живыми организмами.
Под управлением понимается процесс организации такого целенаправленного воздействия на некоторую часть среды, называемую объектом управления, в результате которого удовлетворяются потребности субъекта, взаимодействующего с этим объектом

Состояние объекта Y влияет на состояние потребностей субъекта  где
где  — состояние i-й потребности, которое выражается неотрицательным числом и характеризует насущность, актуальность этой потребности. Свое поведение субъект строит так, чтобы минимизировать насущность своих потребностей
— состояние i-й потребности, которое выражается неотрицательным числом и характеризует насущность, актуальность этой потребности. Свое поведение субъект строит так, чтобы минимизировать насущность своих потребностей  ,где Q — ресурсы субъекта; q(U) — затраты на удовлетворение потребностей. Пусть
,где Q — ресурсы субъекта; q(U) — затраты на удовлетворение потребностей. Пусть  — решение задачи. называется алгоритмом управления
— решение задачи. называется алгоритмом управления  где
где  — алгоритм, позволяющий синтезировать управление по состоянию среды X и текущих потребностей
— алгоритм, позволяющий синтезировать управление по состоянию среды X и текущих потребностей  . Алгоритм управления , которым располагает субъект, определяет эффективность его функционирования в данной среде. Зачастую алгоритм управления имеет рекуррентный характер:
. Алгоритм управления , которым располагает субъект, определяет эффективность его функционирования в данной среде. Зачастую алгоритм управления имеет рекуррентный характер:  , что позволяет на каждом шаге улучшать управление, например, в смысле уменьшения потребностей
, что позволяет на каждом шаге улучшать управление, например, в смысле уменьшения потребностей  .
. 
Здесь на первом этапе определяется цель управления  . Эта задача решается на интуитивном уровне, в результате чего и определяется связь цели, состояния среды и текущих потребностей
. Эта задача решается на интуитивном уровне, в результате чего и определяется связь цели, состояния среды и текущих потребностей  , где
, где  — алгоритм определения цели в зависимости от текущих потребностей и состояния внешней среды X. На втором этапе определяется управление , реализация которого обеспечивает достижение цели . Имея цель управления , синтезируется управление
— алгоритм определения цели в зависимости от текущих потребностей и состояния внешней среды X. На втором этапе определяется управление , реализация которого обеспечивает достижение цели . Имея цель управления , синтезируется управление  , где
, где  — алгоритм управления. Первую функцию
— алгоритм управления. Первую функцию  выполняет субъект, а вторую
выполняет субъект, а вторую  — синтезированное управляющее устройство (УУ) или орган управления (ОУ).
— синтезированное управляющее устройство (УУ) или орган управления (ОУ).
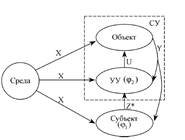
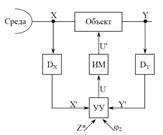
Дальнейшая детализация процесса приводит к определению следующей структурной схемы СУ
 и
и  — датчики, оценивающие состояние среды и объекта.
— датчики, оценивающие состояние среды и объекта.
Результаты измерений  образуют исходную информацию
образуют исходную информацию  для устройства управления, которое на этой основе вырабатывает команду управления U, являющуюся информацией о том, в какое положение должны быть приведены управляемые входы объекта. Осуществление управляющих воздействий, имеющих уже не информационный, но реальный смысл, реализуется исполнительным модулем (ИМ), или каналом управления
для устройства управления, которое на этой основе вырабатывает команду управления U, являющуюся информацией о том, в какое положение должны быть приведены управляемые входы объекта. Осуществление управляющих воздействий, имеющих уже не информационный, но реальный смысл, реализуется исполнительным модулем (ИМ), или каналом управления  . Таким образом, управление в широком смысле определяется четверкой данных
. Таким образом, управление в широком смысле определяется четверкой данных 
Управление – целенаправленная организация того или иного процесса, протекающего в системе. В общем случае процесс управления состоит из четырех элементов:
— получение информации о целях управления { };
— получение информации о состоянии среды и результатах управления  ;
;
— анализ полученной информации и выработка информационного решения U;
— исполнение решения, то есть осуществление управляющих физических воздействий U’.
Процесс управления – это информационный процесс, каждая фаза которого протекает во взаимодействии с окружающей средой при воздействии различного рода помех.
Система управления (СУ) как совокупность взаимодействующих между собой объекта управления и органа управления, деятельность которых направлена на достижение цели.
3й Вариант
Устойчивость систем.
Определение устойчивости
1-я теорема Ляпунова.
Устойчивость
Пусть система определяется отображением

где d и e соответствуют причине и следствию некоторого явления.
Причинно-следственная пара (d,e) называется устойчивой, если незначительные отклонения от e вызываются малыми отклонениями от d, т.е. для всех d~, близких к d,  , соответствующие следствия
, соответствующие следствия  будут близки к e,
будут близки к e,  , где δ, ε – малые величины, причем величина
, где δ, ε – малые величины, причем величина  связана с ε. Это означает, что малые отклонения причины d не могут существенно изменить следствие.
связана с ε. Это означает, что малые отклонения причины d не могут существенно изменить следствие.
Теорема (первая теорема Ляпунова).
1)Пусть существует функция Ляпунова  такая, что
такая, что
 (3)
(3)
где  – скалярная непрерывная неубывающая функция
– скалярная непрерывная неубывающая функция  и
и  ,
, 
2) 2. Пусть также
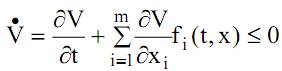 (4)
(4)
где  – называется производной функции Ляпунова в силу системы.
– называется производной функции Ляпунова в силу системы.
Если эти условия выполняются, тривиальное решение устойчиво по Ляпунову.
Док-во
Возьмем  и любое
и любое  . В качестве
. В качестве  выберем такое число, что
выберем такое число, что

Из непрерывности  и условия
и условия  следует, что такое число найдется.
следует, что такое число найдется.
Условие  означает, что функция
означает, что функция  не возрастает вдоль решений исходного уравнения. Тогда, с учетом неравенств (3), (4) при
не возрастает вдоль решений исходного уравнения. Тогда, с учетом неравенств (3), (4) при  , получим
, получим

В силу монотонности  отсюда вытекает, что
отсюда вытекает, что  .
.
Нахождение функций Ляпунова позволяет исследовать уравнения на устойчивость без их решения.
4й Вариант
Управляемость и наблюдаемость систем управления.
Управляемость. Динамическая система называется вполне управляемой тогда и только тогда, когда для любого начального состояния  и любого конечного состояния x(t) существует управляющая траектория
и любого конечного состояния x(t) существует управляющая траектория  такая, что
такая, что  , где H(…) – оператор, описывающий изменение состояния системы. Условия управляемости для линейной системы
, где H(…) – оператор, описывающий изменение состояния системы. Условия управляемости для линейной системы

которая называется полностью управляемой, если может быть переведена из любого произвольного начального состояния  в заданное состояние
в заданное состояние  за конечное время (конечное число шагов). Пусть задано начальное состояние
за конечное время (конечное число шагов). Пусть задано начальное состояние  , тогда состояние системы в момент k=m, где m – порядок уравнения, определяется следующим образом:
, тогда состояние системы в момент k=m, где m – порядок уравнения, определяется следующим образом:

где R – составная матрица; U – управляющая последовательность. Размерность вектора U равна  , а матрицы
, а матрицы  . Если ранг матрицы R равен m (m – размерность
. Если ранг матрицы R равен m (m – размерность  ), то можно получить m уравнений, решением которых будет управляющий сигнал, под воздействием которого объект перейдет из начального в желаемое конечное. Для объекта с одним управляющим входом r=1 (B-вектор) такая последовательность определяется однозначно, то есть единственным решением
), то можно получить m уравнений, решением которых будет управляющий сигнал, под воздействием которого объект перейдет из начального в желаемое конечное. Для объекта с одним управляющим входом r=1 (B-вектор) такая последовательность определяется однозначно, то есть единственным решением  . Если B – матрица, то существует множество решений. Для системы, описываемой линейным дифференциальным уравнением в непрерывном времени
. Если B – матрица, то существует множество решений. Для системы, описываемой линейным дифференциальным уравнением в непрерывном времени  , свойство управляемости также определяется рангом матрицы
, свойство управляемости также определяется рангом матрицы  . Рассмотрим пример определения управляемости движением материальной точки в непрерывном и дискретном времени. Исходное дифференциальное уравнение имеет вид
. Рассмотрим пример определения управляемости движением материальной точки в непрерывном и дискретном времени. Исходное дифференциальное уравнение имеет вид  , где
, где  – координата;
– координата;  – скорость движения точки. Уравнение u(t) задает изменение ускорения движения. Матрица R определяется в виде
– скорость движения точки. Уравнение u(t) задает изменение ускорения движения. Матрица R определяется в виде  и имеет ранг, равный двум. Это значит, что подобная система управляема.Для описания управления в дискретном времени можно использовать разностное уравнение вида
и имеет ранг, равный двум. Это значит, что подобная система управляема.Для описания управления в дискретном времени можно использовать разностное уравнение вида  . Аналогично
. Аналогично  и такая система также управляема, причем достижение любого конечного состояния осуществляется за два шага.
и такая система также управляема, причем достижение любого конечного состояния осуществляется за два шага.
Наблюдаемость. Система называется наблюдаемой, если ее текущее состояние  может быть однозначно восстановлено на основании текущей и прошлой информации о некоторых наблюдаемых параметрах
может быть однозначно восстановлено на основании текущей и прошлой информации о некоторых наблюдаемых параметрах  , связанных с x(t) оператором известного вида
, связанных с x(t) оператором известного вида  , где v(t) – вектор шумов (помех) при проведении наблюдений. Под наблюдаемостью понимается возможность косвенного определения непосредственно не наблюдаемых состояний объекта управления на основе определения некоторых других величин и использования априорной информации. В зависимости от видов множеств X, Y, оператора h и наличия шумов можно определить большое число вариантов постановок задачи наблюдаемости. Пусть
, где v(t) – вектор шумов (помех) при проведении наблюдений. Под наблюдаемостью понимается возможность косвенного определения непосредственно не наблюдаемых состояний объекта управления на основе определения некоторых других величин и использования априорной информации. В зависимости от видов множеств X, Y, оператора h и наличия шумов можно определить большое число вариантов постановок задачи наблюдаемости. Пусть  . Этот вариант называется случаем полной мгновенной
. Этот вариант называется случаем полной мгновенной
наблюдаемости мгновенного наблюдения. Обычно же имеет место ситуация, когда  ,
,  и n<m, то есть имеет место неполная наблюдаемость. Рассмотрим линейную систему в дискретном времени
и n<m, то есть имеет место неполная наблюдаемость. Рассмотрим линейную систему в дискретном времени  , где
, где  – вектор наблюдаемых параметров; h – матрица размером
– вектор наблюдаемых параметров; h – матрица размером  ; G – матрица размером
; G – матрица размером  . Действие управления всегда можно определить и поэтому общность решения не пострадает, если положить
. Действие управления всегда можно определить и поэтому общность решения не пострадает, если положить  . Пусть теперь получены наблюдения
. Пусть теперь получены наблюдения  . Тогда можно записать следующую систему:
. Тогда можно записать следующую систему:  . В векторной форме:
. В векторной форме: 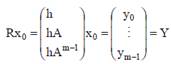 . Состояние , а значит и текущее состояние
. Состояние , а значит и текущее состояние  , можно определить тогда и только тогда, когда матрица R имеет максимальный ранг, равный m. Общий размер R равен
, можно определить тогда и только тогда, когда матрица R имеет максимальный ранг, равный m. Общий размер R равен  . Если ранг R меньше m, то имеет место неполная наблюдаемость. Если n=1, то R – квадратная матрица размером
. Если ранг R меньше m, то имеет место неполная наблюдаемость. Если n=1, то R – квадратная матрица размером  и можно однозначно определить
и можно однозначно определить  . Все эти определения могут быть легко обобщены на случай описания системы нелинейными уравнениями в непрерывном или дискретном времени.
. Все эти определения могут быть легко обобщены на случай описания системы нелинейными уравнениями в непрерывном или дискретном времени.
5й Вариант
Постановка задачи в детерминированной непрерывной системе.
Задача Больца, Майера, Лагранжа(ракета).
При постановке задачи синтеза оптимального управления предполагается, что известны:
-уравнения, описывающие изменение во времени управляемых и наблюдаемых параметров;
-вероятностные характеристики входящих в эти уравнения случайных процессов и распределения начальных значений параметров;
-реализации  полученные в предшествующие моменты времени для каждого t, то есть на интервале
полученные в предшествующие моменты времени для каждого t, то есть на интервале  .
.
Требуется построить такое управление  как некоторый функционал
как некоторый функционал  при котором минимизируется среднее значение функционала потерь (или максимизируется) среднее значение функционала качества, то есть целевого функционала, определяемого соотношением
при котором минимизируется среднее значение функционала потерь (или максимизируется) среднее значение функционала качества, то есть целевого функционала, определяемого соотношением

где  – заданные неотрицательно определенные функции.
– заданные неотрицательно определенные функции.
Если  то рассматривается задача синтеза управления в детерминированной системе, для которой минимизируется непосредственно функционал J без проведения операции усреднения.
то рассматривается задача синтеза управления в детерминированной системе, для которой минимизируется непосредственно функционал J без проведения операции усреднения.
Часто задачи оптимального управления решаются при дополнительных ограничениях. Эти ограничения определяются заданием замкнутого множества допустимых управлений  то есть ограничений вида
то есть ограничений вида 
Варианты постановки задачи
Задача Больца (смешанное управление:  ).
).
Задача Лагранжа (интегральное управление:  ).
).
Задача Майера (терминальное управление:  ).
).
Задача быстродействия ( ).
).
Классической является задача синтеза оптимального управления детерминированной системой при полной обратной связи (вектор x известен) и без ограничений на управление Ее постановка определяется соотношениями

Конкретизируя постановку (4), рассматривают следующие случаи: время начала  , начальное состояние
, начальное состояние  и время окончания процесса T фиксировано (задача со свободным правым концом и фиксированным временем);
и время окончания процесса T фиксировано (задача со свободным правым концом и фиксированным временем);
фиксировано начальное и конечное  состояния и не определен момент окончания движения системы; различные смешанные ситуации.
состояния и не определен момент окончания движения системы; различные смешанные ситуации.
Пример постановки задачи оптимального управления (4). Задача выведения ракеты на заданную круговую орбиту радиусом R.

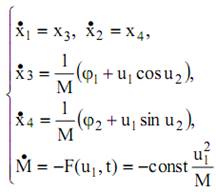
Движение ракеты описывается системой уравнений
и совокупностью начальных условий вида

где  – вектор состояния ракеты;
– вектор состояния ракеты;  – координаты и скорости ракеты; M – текущая масса ракеты;
– координаты и скорости ракеты; M – текущая масса ракеты;  – вектор управления,
– вектор управления,  – сила тяги,
– сила тяги,  – угол между направлениями тяги и осью ОХ1;
– угол между направлениями тяги и осью ОХ1;  – проекции сил сопротивления подъему по координатным осям.
– проекции сил сопротивления подъему по координатным осям.
Оптимизация управления может осуществляться двумя способами. Путем минимизации расхода топлива в единицу времени, тогда 
Путем максимизации конечной скорости при выведении на орбиту, тогда
6й Вариант
Решение задачи синтеза управления методом вариационного счисления.
Вывод уравнения Лагранжа.
Решение задачи синтеза управления методом вариационного исчисления и вывод уравнения Лагранжа
Вариационное исчисление изучает методы нахождения экстремума
функционалов.
Вариацией функции y(x) есть функция от x вида δy = Y(x) − y(x),определяемая как разность новой функции Y(x) и y(x). Не следует вариацию, вызывающую изменения функционального соотношения между y и x, смешивать с приращением Δy функции y(x), вызванным приращением переменной x.
Пусть дана функция F(y1(x),..., yn (x),x). Если она имеет непрерывные частные производные второго порядка, то ее приращение, вызванное вариациями δy1,...,δyn, определяется как

В приведенном выражении (формуле Тейлора) первый и второй член – есть первая δF и вторая δ2F вариации функции F. В дальнейшем будем использовать следующие обозначения. Для скалярной функции ϕ(x) векторного аргумента T x = (x1,..., xm)т
Для вектор-функции f (x) векторного аргумента
Решение поставленной задачи нахождения минимума функционала J осуществляется по следующей схеме.
- Образуется вспомогательный функционал


Необходимость введения вспомогательного функционала определяется необходимостью учета характера движения объекта в соответствии с
уравнением 
- Вводится скалярная функция, называемая гамильтонианом

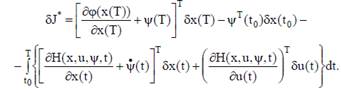
Интегрируя по частям последнее слагаемое в правой части (5), выражение для вспомогательного функционала J* представляется в виде

3.Находится вариация вспомогательного функционала J*, соответствующая вариациям управления u(t) с учетом возникающих при этом вариаций x(t)
4.Для того, чтобы исключить влияние вариаций δx(t), вызванных вариациями по управлению δu(t), на вариации функционала δJ*, выбираются множители ψ(t) таким образом, чтобы коэффициенты при δx(t),
δx(T) обратились в 0
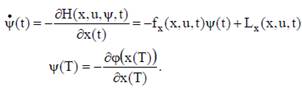
Система уравнений  называется сопряженной системой.
называется сопряженной системой.
При выборе ψ(t) в соответствии с сопряженной системой уравнение для вариации δJ* имеет вид

Уравнение  определяет первую вариацию функционала J*.
определяет первую вариацию функционала J*.
Поскольку J = J* на траекториях решения уравнения, описывающего поведение системы, то и δJ = δJ*. Если J достигает экстремума, то δJ = 0 для произвольных δu.
5. Учитывается, что  фиксировано, тогда δx(t0) = 0. Учитывается также, что
фиксировано, тогда δx(t0) = 0. Учитывается также, что  – множество ограниченных непрерывных функций, тогда из выражения
– множество ограниченных непрерывных функций, тогда из выражения 
получается необходимое условие экстремума в виде следующего уравнения
В своей совокупности уравнения
 и
и 
известны как уравнения Эйлера-Лагранжа. Они дают так называемое стационарное решение – необходимое условие минимума функционала потерь.
Достаточное условие экстремума задается на основе определения еще и знака второй вариации  , однако часто ограничиваются рассмотрением только первой вариации.
, однако часто ограничиваются рассмотрением только первой вариации.
Таким образом, для того, чтобы найти  , нужно решить систему уравнений порядка 2m следующего вида:
, нужно решить систему уравнений порядка 2m следующего вида:
где u(t) определяется из условия

Система уравнений имеет m краевых условий на левом конце и m краевых условий на правом конце  Таково общее решение задачи в рамках классических методов вариационного исчисления
Таково общее решение задачи в рамках классических методов вариационного исчисления