Лабораторная работа № 1
Статическая модель системы
частотной автоподстройки частоты
Основные сведения
Система частотной автоподстройки частоты (ЧАПЧ) в своем основном применении известна как система автоподстройки частоты гетеродина (см. рис.1). Она предназначена для поддержания равенства промежуточной частоты и средней частоты амплитудно-частотной характеристики УПЧ. Требуемое значение промежуточной частоты задается переходной частотой f перех дискриминационной характеристики частотного дискриминатора ЧД. Типичный вид дискриминационной характеристики показан на рис. 2.
U чд
 f
f перех
f
f перех
|
| Рис. 2
|
Если промежуточная частота равна переходной, то напряжение на выходе частотного дискриминатора равно нулю и частота гетеродина не изменяется. При отклонении промежуточной частоты от переходной появляется напряжение на выходе частотного дискриминатора, которое вызывает изменение частоты гетеродина так, чтобы уменьшилось отклонение промежуточной частоты. Дискриминационная характеристика описывается нелинейной зависимостью U чд = U чд(D f), где D f = f – f перех. Можно объединить перестраиваемый генератор, смеситель и УПЧ в один сложный перестраиваемый генератор, и тогда система ЧАПЧ примет вид, представленный на рис. 3.

|
| Рис. 3
|
Для определения характеристик системы в установившемся режиме составляется статическая модель. В ней отражаются только функциональные преобразования процессов. Статическая модель системы изображена на рис. 4. При ее составлении учитывалось, что для постоянного воздействия коэффициент передачи ФНЧ равен 1, а частота перестраиваемого генератора f п г = f пг0 + D f пг, где f пг0 – частота ПГ при
управляющем напряжении, равном нулю, и D f пг – приращение частоты перестраиваемого генератора, зависящее от управляющего напряжения. Суммирующее и вычитающее устройства можно заменить одним вычитающим, так как D f = f перех – f пг0 - D f пг. Введем новую переменную - начальную расстройку D f нач = f перех – f пг0, тогда D f = D f нач - D f пг Преобразованная статическая модель показана на рис.5.
Эта модель описывается системой алгебраических уравнений:
U у = К упт U чд(D f), (1, а)
D f = D f нач - D f пг(U у). (1, б)
Графическое решение этой системы уравнений показано на рис. 6,а. Уравнение (1, б) представлено семейством линий, зависящих от значения начальной расстройки. Значение расстройки в установившемся режиме D f уст равно горизонтальной координате точки пересечения линий, а значение управляющего напряжения в установившемся режиме U у уст – вертикальной координате этой точки. На рис. 6,б показана зависимость расстройки в установившемся режиме D fуст от начальной расстройки. Для линии, отмеченной звездочкой *, показано, как определяется положение точки на зависимости D fуст (D fнач).Если увеличивать начальную расстройку от нуля, то будет увеличиваться и расстройка в установившемся режиме. Решение системы уравнений будет перемещаться по линии ОА. Это решение соответствует режиму эффективной автоподстройки, для которого D fуст <<D fнач. Начальная расстройка, при которой линия 1, б будет касательной линии 1, а в точке А, определяет границу режима эффективной автоподстройки. При дальнейшем увеличении начальной расстройки решение перейдет в точку В. Расстройка в установившемся режиме будет близка к начальной расстройке. Это режим
отсутствия автоподстройки. Начальная расстройка, при которой система ЧАПЧ выйдет из режима эффективной автоподстройки, называется полосой удержания. Если теперь увеличивать начальную расстройку, то режим отсутствия автоподстройки будет сохраняться до тех пор, пока линия 1, б не станет касательной к линии 1, а в точке С. При малейшем уменьшении начальной расстройки система ЧАПЧ перейдет в режим эффективной автоподстройки. Начальная расстройка, при которой система ЧАПЧ входит в режим эффективной автоподстройки, называется полосой захвата.
Режим, соответствующий решению системы алгебраических уравнений на участке АС, будет неустойчив. Это можно показать следующим образом. На спадающем участке дискриминационной характеристики тангенс угла наклона, равный коэффициенту передачи дискриминатора, отрицательный и поэтому обратная связь положительная. При положительной обратной связи система устойчива, если коэффициент передачи по петле обратной связи меньше единицы. Для точки D, находящейся на участке АС, модуль тангенса угла наклона линии 1, а больше модуля тангенса угла наклона линии 1, б: ½tga1½>½tga2½. Но tga1 = К чд, а tga2 = =1¤ К пг. Следовательно, ½ К чд½>½1¤ К пг½ и ½ К чд К пг½>1. Значит, состояние системы ЧАПЧ, соответствующее решению D, будет неустойчивым.
 D f нач D f = D f уст D f пг D f нач D f = D f уст D f пг
|
| Рис. 7
|
Для оценки качества работы в режиме малых расстроек используется коэффициент автоподстройки К ап = =D f нач/D f уст, который показывает, во сколько раз система ЧАПЧ уменьшает начальную расстройку. Его можно найти из статической модели, если заменить нелинейные зависимости линейными, т.е. U чд(D f) = К чдD f и D f пг(U у) = К пг U у. Тогда нелинейная статическая модель преобразуется в линейную, показанную на рис. 7. Для нее D f уст = D f нач – К упт К чд К пгD f уст. Отсюда К ап = 1+ К упт К чд К пг = 1+ K, где K – коэффициент передачи разомкнутой системы.
В анализируемой модели дискриминационная характеристика описывается выражением:
U чд(D f) = 1 ¤ [1 + (D f - D f0)2] – 1 ¤ [1 + (D f + D f0)2]. (2)
Модель системы приведена на рис. 8. Операция возведения в квадрат реализуется блоком умножения. Перестраиваемый генератор считается линейным устройством. ФНЧ, УПТ и ПГ моделируются инерционным звеном с передаточной функцией К ¤ (1 + 0,1 p).
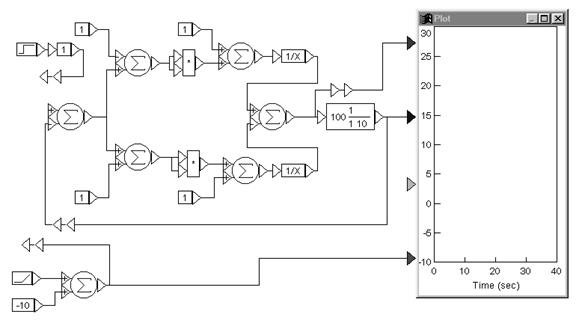
Рис. 8
Дополнительная информация по тематике лабораторной работы изложена в [1, §1.2], [2, §2.1, 7.1], [4, §2].
Задание на предварительный расчет
Решить графически систему алгебраических уравнений (1, а) и (1, б), учитывая, что дискриминационная характеристика описывается уравнением (2). Исходные данные взять из таблицы:
| Вариант
|
|
|
|
|
|
|
|
|
|
|
|
|
| D f 0
|
|
|
|
|
|
|
|
| 1,5
| 1,5
| 1,5
| 1,5
|
| K
|
|
|
|
|
|
|
|
|
|
|
|
|
Построить зависимость D f уст(D f нач).Определить полосу захвата, полосу удержания и коэффициент автоподстройки.
Программа работы
Из папки “Радиоавтоматика” вызвать лабораторную работу № 1 (Lab_rab1) (П1). Установить время моделирования 50 с.(П6).
1. Исследование статических характеристик.
1.1. Установить заданные значения параметров K и D f (П5). Отсоединить обратную связь (П2). Подать на вход модели линейно возрастающее воздействие. Подсоединить к Plot выход модели частотного дискриминатора. Нанести на Plot шкалу (П9). Запустить моделирование (П8). На экране появится изображение дискриминационной характеристики. Так как скорость входного процесса 1 ед.¤с, то горизонтальная шкала в секундах совпадает со шкалой в единицах входного процесса. Ноль входного процесса соответствует времени 10 с. Развернуть Plot на весь экран (П11).Сравнить полученную характеристику с рассчитанной. Если нужно увеличить масштаб изображения, измените границы изображения по вертикали и горизонтали (П13). Восстановить изображение.
1.2. Замкнуть обратную связь. К Plot подсоединить входной процесс, выходной процесс и ошибку (выход сравнивающего устройства). Запустить моделирование. Если выходной процесс не умещается на экране Plot или, наоборот, процесс заканчивается задолго до окончания развертки, изменить время моделирования. Развернуть изображение на весь экран. По полученным зависимостям составить таблицу: D f уст(D f нач) и D f пг(D f нач). Для более точного измерения значений процессов можно использовать перекрестие (П20). По этим данным построить зависимости. Объяснить их. Определить полосу захвата, полосу удержания и коэффициент автоподстройки. Восстановить размеры окна.
1.3. Уменьшить K в 2 раза. Запустить моделирование. Какие изменения произошли в наблюдаемых процессах по сравнению с п. 1.2? Объяснить эти изменения. Измерить полосу захвата, полосу удержания, коэффициент автоподстройки.
1.4. Проделать п. 1.3, уменьшив K еще в 2 и в 4 раза. Результаты измерений по пп. 1.2 – 1.4 свести в таблицу и построить зависимости полосы захвата, полосы удержания и коэффициента автоподстройки от коэффициента передачи K. Объяснить эти зависимости, используя графическое решение системы уравнений, описывающих статическую модель.
2. Исследование процессов перестройки.
2.1. Установить значение K равным заданному. Отсоединить от входа модели линейное воздействие и подать на вход скачок. Амплитуду скачка (значение коэффициента передачи блока Gain) установить такой, чтобы она была меньше полосы захвата примерно в 2 раза. Запустить моделирование. Развернуть изображение на весь экран. Замерить установившееся значение процесса. Убедиться, что оно соответствует режиму эффективной автоподстройки. Восстановить изображение.
2.2. Установить амплитуду скачка немного меньше полосы захвата. Запустить моделирование. Обратить внимание на изменение формы переходного процесса. Объяснить, почему так изменился переходный процесс. Замерить установившееся значение выходного процесса. Убедиться, что оно соответствует режиму эффективной автоподстройки.
2.3. Установить амплитуду скачка в интервале между полосой захвата и полосой удержания. Запустить моделирование. Замерить установившееся значение выходного процесса. Какому режиму работы соответствует оно - эффективной автоподстройке или отсутствию автоподстройки? Объяснить, почему достигается именно этот режим.
Завершить работу (П21).
Контрольные вопросы
1. Какой вид имеет структурная схема системы ЧАПЧ?
2. Как составляется статическая модель системы ЧАПЧ и какой вид она имеет?
3. Какими уравнениями описывается статическая модель?
4. Как проводится графическое решение системы алгебраических уравнений, описывающих статическую модель?
5. Почему некоторым решениям системы уравнений не может соответствовать установившийся режим в системе ЧАПЧ?
6. Как определить устойчивость состояния равновесия, соответствующего решению системы алгебраических уравнений?
7. Как строится зависимость расстройки в установившемся режиме от начальной расстройки?
8. Какой вид имеет статическая характеристика D fуст (D fнач) системы ЧАПЧ?
9. Как определяется коэффициент автоподстройки и от чего он зависит?
10. Как определяются полосы захвата и удержания и от чего они зависят?
Лабораторная работа № 2
Устойчивость линейной системы авторегулирования
Общие сведения
Устойчивость системы означает, что она принципиально может выполнять свои функции.. Для линейных систем можно пользоваться следующим определением устойчивости: линейная система устойчива, если при ограниченном входном воздействии выходной процесс тоже ограничен.
Прямым методом анализа устойчивости является решение дифференциального уравнения, описывающего систему:
 где
где  и
и  - соответственно выходной и входной процессы в системе.
- соответственно выходной и входной процессы в системе.
Устойчивость линейной системы не зависит от вида входного воздействия, и можно взять его любым, в том числе и нулевым, но удобнее принять x (t) = 1(t). В этом случае решением дифференциального уравнения будет переходная характеристика. И по виду ее можно определить устойчивость системы. Если переходная характеристика стремится к постоянному значению, то система устойчива. Если же переходная характеристика уходит в бесконечность, то неустойчива. Из решения дифференциального уравнения следует, что выходной процесс ограничен, если корни характеристического уравнения
anpn + an- 1 pn- 1 +…+ a 0 = 0
располагаются в левой полуплоскости.
При анализе устойчивости систем авторегулирования наиболее часто используется критерий устойчивости Найквиста. Согласно этому критерию замкнутая система устойчива при устойчивой разомкнутой, если годограф частотной характеристики разомкнутой системы не охватывает точки с координатами (-1, 0).Типовой вид годографа частотной характеристики разомкнутой системы, описываемой передаточной функцией
 , (3)
, (3)
приведен на рис.9.
Годограф начинается на действительной оси, так как на нулевой частоте коэффициент передачи разомкнутой системы является действительной величиной К р(0) = К. С ростом частоты модуль коэффициента передачи К р(w) уменьшается и вносится отрицательный фазовый сдвиг jр(w), поэтому вектор К р(j w) поворачивается по часовой стрелке. При w = ¥ К р(w) = 0 и jр(w) = - 3p¤2. Для устойчивой системы точка (-1, 0) должна лежать вне фигуры, образованной годографом частотной характеристики и действительной положительной полуосью.
Если в разомкнутую систему входят интеграторы, то годограф частотной характеристики разомкнутой системы начинается в бесконечности. Такие системы называются астатическими. Количество интеграторов равно порядку астатизма. Для системы с одним интегратором, имеющей передаточную функцию
 , (4)
, (4)
годограф начинается в третьем квадранте (рис. 10), а для системы с двумя интеграторами с передаточной функцией
 - (5)
- (5)
во втором квадранте, т.к. уже на нулевой частоте интегратор вносит фазовый сдвиг, равный p¤2.
Для построения замкнутого контура в этих случаях требуется к годографу добавить столько четвертей окружности бесконечного радиуса, сколько интеграторов в разомкнутой системе. На рис. 10 и рис. 11 это добавление условно показано пунктирной линией. Замкнутая система с годографом К р(j w), изображенном на рис. 10, устойчива, а на рис. 11 – неустойчива. Причем последняя является структурно-неустойчивой, т.е. неустойчивой при любом коэффициенте передачи разомкнутой системы.
По годографу частотной характеристики разомкнутой системы можно оценить степень устойчивости. Для этого вводится понятие запасов устойчивости по усилению и по фазе. Запас устойчивости по усилению D К показывает, во сколько раз нужно изменить коэффициент передачи разомкнутой системы, чтобы замкнутая из устойчивой стала неустойчивой. Запас устойчивости по фазе Dj показывает, какой фазовый сдвиг нужно ввести в разомкнутую систему, чтобы замкнутая из устойчивой стала неустойчивой. На рис. 12 показано, как эти запасы определяются по годографу частотной характеристики разомкнутой системы. Запас устойчивости по усилению D К = =1¤ К 1, где К 1 – коэффициент передачи разомкнутой системы на частоте, для которой jр(w) = -p.Запас устойчивости по фазе равен углу Dj между отрицательной действительной полуосью и линией, соединяющей начало координат с точкой пересечения годографа с окружностью единичного радиуса.
На практике удобнее пользоваться не годографом частотной характеристики, а амплитудно-частотной и фазочастотной характеристиками. И еще более удобно использовать логарифмические АЧХ и ФЧХ, т.е. ЛАХ и ЛФХ. Критерий Найквиста в этом случае формулируется так: замкнутая линейная система устойчива при устойчивой разомкнутой, если в области частот, где ЛАХ разомкнутой системы положительна, ЛФХ разомкнутой системы или не пересекает значения -p, или пересекает его сверху вниз и снизу вверх одинаковое количество раз. При монотонной ЛФХ разомкнутой системы устойчивость можно определить, сравнивая две характерные частоты: частоту среза wср, на которой ЛАХ пересекает ось частот, и критическую частоту wкр, на которой ЛФХ пересекает значение -p. Для устойчивой системы wкр>wср. Запас устойчивости по усилению D L определяется на критической частоте как расстояние от ЛАХ до оси частот, а запас устойчивости по фазе – на частоте среза как расстояние от -p до ЛФХ (рис.13).
Логарифмические частотные характеристики позволяют легко и наглядно исследовать влияние параметров системы на ее устойчивость. Рассмотрим это на примере системы с передаточной функцией (3).
На рис. 14 изображены ЛАХ и ЛФХ разомкнутой системы для следующих значений постоянных времени: Т 1 = 10-1 с, Т 2 = 10-2 с, Т 3 = =10-3 с и различных значений коэффициента передачи К = 10; 100; 103. При К = 10 замкнутая система устойчива. Запас устойчивости по фазе: 45 град, по усилению: 20 дБ. При К = 100 система находится на грани устойчивости и при К = 1000 неустойчива.
На рис.15 изображены логарифмические характеристики разомкнутой системы при К = 100, Т 2 = 10-2 с, Т 3 = 10-3 с и различных значений Т 1: 1 с; 0,1 с и 0,01 с. Видно, что увеличение постоянной времени Т 1 делает систему устойчивой и чем больше Т 1, тем больше запасы устойчивости. Уменьшение Т 1 приведет к неустойчивости системы. Наиболее неблагоприятной будет ситуация, когда все постоянные времени максимально близки друг к другу, т.е. при Т 1 = (Т 2 + Т 3) ¤ 2. При дальнейшем уменьше-
нии Т 1 ЛФХ приподнимается в области частот, близких к частоте среза, и склонность системы к неустойчивости будет уменьшаться. При Т 1 = 0 ЛФХ не будет пересекать значения -p, и система будет устойчивой при любом коэффициенте передачи.
Схема моделирования показана на рис. 16.

Рис. 16
Исследование устойчивости для удобства сравнения проводится на трех моделях, отличающихся структурой или параметрами.
Дополнительная информация по тематике лабораторной работы изложена в [1,§ 5.1, 5.3, 5.4, 5.5], [3,§2.1].
Задание на предварительный расчет
1. Построить на одном графике ЛАХ и ЛФХ разомкнутой системы с передаточными функциями (3) - (5) для значений параметров, заданных таблицей:
| Вар.
|
|
|
|
|
|
|
|
|
|
|
|
|
| Т 1,с
| 0,5
| 2,5
|
| 1,2
| 1,5
|
|
|
|
|
|
| 2,5
|
| Т 2,с
| 0,1
| 0,5
| 0,4
| 0,3
| 0,2
| 0,6
| 0,5
| 0,4
| 0,3
| 0,6
| 0,2
| 0,4
|
| 10 Т 3,с
| 0,2
| 0,4
| 0,3
| 0,6
| 0,5
| 0,4
| 0,6
| 0,4
| 0,8
| 0,5
| 0,2
| 0,5
|
| К
|
|
|
|
|
|
|
|
|
|
|
|
|
2. Определить запасы устойчивости по усилению и по фазе для устойчивых систем.
3. Составить модели систем с передаточными функциями (3) - (5) при заданных параметрах.
Программа работы
Из папки “Радиоавтоматика” вызвать лабораторную работу № 2 (Lab_rab2) (П1). На рабочем столе Windows появятся три модели. На первой модели реализуется статическая система по передаточной функции (3), на второй модели – астатическая система первого порядка по передаточной функции (4) и на третьей модели – астатическая система второго порядка по передаточной функции (5). Установить заданные значения постоянных времени и коэффициента передачи (П5).
1. Исследование частотных характеристик разомкнутой системы и устойчивости замкнутой системы.
1.1. В первой модели выделить разомкнутую систему, которая включает все блоки за исключением вычитающего устройства (П4), и просмотреть годограф частотной характеристики (П14). В пакете VisSim годограф строится для положительных и отрицательных частот, поэтому он симметричен относительно действительной оси. Нанести шкалу (П9). Развернуть годограф на весь экран (П11). Зарисовать годограф (можно только для положительных частот). Восстановить размер изображения. То же самое проделать для второй и третьей моделей, сохраняя годографы предыдущих моделей. Сравнить годографы, объяснить их форму. Рассмотреть более подробно и зарисовать годографы в окрестности точки (-1, 0), для чего изменить границы изображения и принять их равными –2 и 2 по обеим координатным осям (П13). Сделать вывод об устойчивости замкнутых систем и оценить запасы устойчивости. Закрыть все окна с годографами (П12).
1.2. В первой модели выделить разомкнутую систему и просмотреть ЛАХ и ЛФХ (П16). Установить шкалу по оси Y в децибелах (П15), если эта ось проградуирована в других единицах. Нанести на ЛАХ и ЛФХ шкалу. Сравнить эти характеристики с построенными при подготовке к работе. Замерить частоту среза, запас устойчивости по фазе, критическую частоту и запас устойчивости по усилению. Сравнить их с рассчитанными при подготовке к работе. Закрыть окна с частотными характеристиками.
1.3. Проделать п.1.2 для второй и третьей моделей.
1.4. Подать на входы всех трех моделей единичный скачок. Выходы всех моделей подсоединить к Plot. Запустить моделирование. Если выходной процесс в неустойчивой системе принимает очень большие значения и нельзя просмотреть переходные характеристики, уменьшить время моделирования (П6). Зарисовать переходные характеристики. Сделать вывод об устойчивости систем.
2. Исследование влияния коэффициента передачи разомкнутой системы на устойчивость замкнутой системы.
2.1. На всех трех моделях реализовать систему с передаточной функцией (3).Постоянные времени установить в соответствии с заданием, а коэффициент передачи К установить различным: для первой модели – равным заданному, а для двух других – в два раза больше и в два раза меньше заданного.
















 f перех D f U у D f пг f пг0
f перех D f U у D f пг f пг0
 f пг
f пг