Момент силы относительно центра (или точки).
Опыт показывает, что под действием силы твердое тело может наряду с поступательным перемещением совершать вращение вокруг того или иного центра. Вращательный эффект силы характеризуется ее моментом.
Рассмотрим силу  , приложенную в точке А твердого тела (рис. 11). Допустим, что сила стремится повернуть тело вокруг центра О. Перпендикуляр h, опущенный из центра O на линию действия силы , называется плечом силы относительно центра О. Так как точку приложения силы можно произвольно перемещать вдоль линии действия, то, очевидно, вращательный эффект силы будет зависеть: 1) от модуля силы F и длины плеча h; 2) от положения плоскости поворота ОАВ, проходящей через центр О и силу F; 3) от направления поворота к этой плоскости.
, приложенную в точке А твердого тела (рис. 11). Допустим, что сила стремится повернуть тело вокруг центра О. Перпендикуляр h, опущенный из центра O на линию действия силы , называется плечом силы относительно центра О. Так как точку приложения силы можно произвольно перемещать вдоль линии действия, то, очевидно, вращательный эффект силы будет зависеть: 1) от модуля силы F и длины плеча h; 2) от положения плоскости поворота ОАВ, проходящей через центр О и силу F; 3) от направления поворота к этой плоскости.
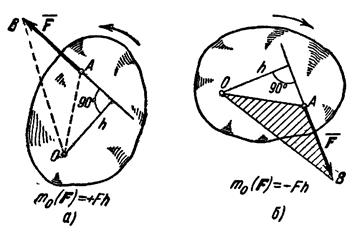
Рис.11
Ограничимся пока рассмотрением систем сил, лежащих в одной плоскости. В этом случае плоскость поворота для всех сил является общей и в дополнительном задании не нуждается.
Тогда для количественного измерения вращательного эффекта можно ввести следующее понятие о моменте силы: моментом силы относительно центра О называется величина, равная взятому с соответствующим знаком произведению модуля силы на длину плеча.
Момент силы относительно центра О будем обозначать символом m 0(F). Следовательно,

В дальнейшем условимся считать, что момент имеет знак плюс, если сила стремится повернуть тело вокруг центра О против хода часовой стрелки, и знак минус, - если по ходу часовой стрелки. Так, для силы , изображенной на рис.20, а, момент относительно центра О имеет знак плюс, а для силы, показанной на рис.20, б, - знак минус.
Отметим следующие свойства момента силы:
1) Момент силы не изменяется при переносе точки приложения силы вдольее линии действия.
2) Момент силы относительно центра О равен нулю только тогда, когда сила равна нулю или когда линия действия силы проходит через центр О (плечо равно нулю).
3) Момент силы численно выражается удвоенной площадью треугольника ОАВ (рис. 20, б)

Этот результат следует из того, что

Рассмотренное определение момента силы подходит только для плоской системы сил.
Теорема Вариньона о моменте равнодействующей.
Докажем следующую теорему Вариньона: момент равнодействующей плоской системы сходящихся сил относительно любого центра равен алгебраической сумме моментов слагаемых сил относительно того же центра.
Рис.12
Рассмотрим систему сил  , сходящихся в точке А (рис.12). Возьмем произвольный центр О и проведем через него ось Ох, перпендикулярную к прямой ОА; положительное направление оси Ох выбираем так, чтобы знак проекции любой из сил на эту ось совпадал со знаком ее момента относительно центра О.
, сходящихся в точке А (рис.12). Возьмем произвольный центр О и проведем через него ось Ох, перпендикулярную к прямой ОА; положительное направление оси Ох выбираем так, чтобы знак проекции любой из сил на эту ось совпадал со знаком ее момента относительно центра О.
Для доказательства теоремы найдем соответствующие выражения моментов m0( ), m0(
), m0( ), …. По формуле
), …. По формуле  . Но, как видно из рисунка,
. Но, как видно из рисунка,  где F 1x - проекция силы на ось Ох; следовательно
где F 1x - проекция силы на ось Ох; следовательно
 .
.
Аналогично вычисляются моменты всех других сил.
Обозначим равнодействующую сил , через  , где
, где  . Тогда, по теореме о проекции суммы сил на ось, получим
. Тогда, по теореме о проекции суммы сил на ось, получим  . Умножая обе части этого равенства на ОА, найдем:
. Умножая обе части этого равенства на ОА, найдем:
или,
 .
.
Пара сил. Момент пары.
Парой сил (или просто парой) называются две силы, равные по величине, параллельные и направленные в противоположные стороны (рис.13). Очевидно,  и
и  .
.
Рис.13
Несмотря на то, что сумма сил равна нулю, эти силы не уравновешиваются. Под действием этих сил, пары сил, тело начнёт вращаться. И вращательный эффект будет определяться моментом пары:
 .
.
Расстояние a между линиями действия сил называется плечом пары.
Если пара вращает тело против часовой стрелки, момент её считается положительным (как на рис.13), если по часовой стрелке – отрицательным.
Для того, чтобы момент пары указывал и плоскость, в которой происходит вращение, его представляют вектором.
Вектор момента пары  направляется перпендикулярно плоскости, в которой расположена пара, в такую сторону, что если посмотреть оттуда, увидим вращение тела против часовой стрелки (рис. 14).
направляется перпендикулярно плоскости, в которой расположена пара, в такую сторону, что если посмотреть оттуда, увидим вращение тела против часовой стрелки (рис. 14).
Нетрудно доказать, что вектор момента пары  – есть вектор этого векторного произведения (рис. 14). И заметим, что он равен вектору момента силы относительно точки А, точки приложения второй силы:
– есть вектор этого векторного произведения (рис. 14). И заметим, что он равен вектору момента силы относительно точки А, точки приложения второй силы:
 .
.
О точке приложения вектора будет сказано ниже. Пока приложим его к точке А.
Рис.14
Свойства пар
1) Проекция пары на любую ось равна нулю. Это следует из определения пары сил.
2) Найдём сумму моментов сил  оставляющих пару, относительно какой-либо точки О (рис.15).
оставляющих пару, относительно какой-либо точки О (рис.15).
Рис.15
Покажем радиусы-векторы точек А 1 и А 2 и вектор  , соединяющий эти точки. Тогда момент пары сил относительно точки О
, соединяющий эти точки. Тогда момент пары сил относительно точки О
 .
.
Но  . Поэтому
. Поэтому  .
.
Но  .
.
Значит  .
.
Момент пары сил относительно любой точки равен моменту этой пары.
Отсюда следует, что, во-первых, где бы не находилась точка О и, во-вторых, где бы не располагалась эта пара в теле и как бы она не была повёрнута в своей плоскости, действие её на тело будет одинаково. Так как момент сил, составляющих пару, в этих случаях один и тот же, равный моменту этой пары .
Поэтому можно сформулировать ещё два свойства.
3) Пару можно перемещать в пределах тела по плоскости действия и переносить в любую другую параллельную плоскость.
4) Так как действие на тело сил, составляющих пару, определяется лишь её моментом, произведением одной из сил на плечо, то у пары можно изменять силы и плечо, но так, чтобы момент пары остался прежним. Например, при силах F 1 =F 2 = 5 H и плече а = 4 см момент пары m = 20 H∙см. Можно силы сделать равными 2 Н, а плечо а = 10 см. При этом момент останется прежним 20 Нсм и действие пары на тело не изменится.
Все эти свойства можно объединить и, как следствие, сделать вывод, что пары с одинаковым вектором момента и неважно где расположенные на теле, оказывают на него равное действие. То есть такие пары эквивалентны.
Исходя из этого, на расчётных схемах пару изображают в виде дуги со стрелкой, указывающей направление вращения, и рядом пишут величину момента m (рис.15.1). Или, если это пространственная конструкция, показывают только вектор момента этой пары. И вектор момента пары можно прикладывать к любой точке тела. Значит вектор момента пары – свободный вектор. Такое упрощенное изображение оправдано тем, что пара сил характеризуется моментом, а не ее положением в плоскости. Но если необходимо определять не внешние силы, а внутренние в разных сечениях элемента, как это делается в сопротивлении материалов, то важен знак и место приложения пары сил.
Рис.15.1. Эквивалентные пары сил
И ещё одно дополнительное замечание. Так как момент пары равен вектору момента одной из сил её относительно точки приложения второй силы, то момент пары сил относительно какой-либо оси z – есть проекция вектора момента пары на эту ось:
 ,
,
где  – угол между вектором и осью z.
– угол между вектором и осью z.
Сложение пар.
Пусть даны две пары с моментами m 1и m 2, расположенные в пересекающихся плоскостях (рис.16).
Сделаем у пар плечи одинаковыми, равными а = АВ. Тогда модули сил, образующих первую пару, должны быть равны:  , а образующих вторую пару:
, а образующих вторую пару:  .
.
Эти пары показаны на рис.16, где  . И расположены они в своих плоскостях так, что плечи пар совпадают с прямой АВ на линии пересечения плоскостей.
. И расположены они в своих плоскостях так, что плечи пар совпадают с прямой АВ на линии пересечения плоскостей.
Рис.16
|
Сложив силы, приложенные к точкам А и В, построением параллелограммов, получим их равнодействующие  . Так как
. Так как  , то эти силы
, то эти силы  и
и  будут образовывать пару, момент которой
будут образовывать пару, момент которой  , где
, где  – радиус-вектор точки В, совпадающий с АВ.
– радиус-вектор точки В, совпадающий с АВ.
Так как  , то момент полученной пары
, то момент полученной пары
 .
.
Следовательно, в результате сложения пар, расположенных в пересекающихся плоскостях, получится пара сил. Момент её будет равен векторной сумме моментов слагаемых пар.
При сложении нескольких пар, действующих в произвольных плоскостях, получим пару с моментом
 .
.
Конечно, эта результирующая пара будет располагаться в плоскости перпендикулярной вектору .
Равенство нулю результирующей пары будет означать, что пары, действующие на тело, уравновешиваются. Следовательно, условие равновесия пар
 =0.
=0.
Это является необходимым и достаточным условием равновесия систем пар.
Если пары расположены в одной плоскости, векторы моментов их будут параллельны. И момент результирующей пары можно определить как алгебраическую сумму моментов пар.
Рис.17
Например, пары, показанные на рис.17, расположены в одной плоскости и моменты их:
m 1=2 Hсм, m 2=5 Hсм, m 3=3 Hсм. Пары уравновешиваются, потому что алгебраическая сумма их моментов равна нулю:

Теорема о параллельном переносе силы.
Одной из основных задач, решаемых статикой, является замена одной системы сил другой – эквивалентной ей.
Такая процедура позволяет все многообразие систем сил свести к простейшим каноническим системам, классифицировать их и получить уравнения равновесия, необходимые для решения практических задач. Ключевую роль в проведении таких преобразований систем сил играет следующая теорема, называемая Лемма Пуансо.
Равнодействующая системы сходящихся сил непосредственно находится с помощью аксиомы параллелограмма сил. Для двух параллельных сил эта задача была решена путем приведения их к сходящимся силам. Очевидно, что аналогичную задачу легко будет решить и для произвольной системы сил, если найти и для них метод приведения к силам, приложенным в одной точке.
Ранее мы установили, что вектор силы можно переносить по линии действия в любую точку тела.
Попробуем силу (рис. 19) перенести в какую-нибудь точку О, не расположенную на линии действия.
Рис.19
Приложим к этой точке две уравновешивающиеся силы  и
и  , параллельные силе и равные ей по величине:
, параллельные силе и равные ей по величине: 
В результате получим силу  , приложенную к точке О. То есть мы как бы перенесли заданную силу из точки А в точку О, но при этом появилась пара, образованная силами и . Момент этой пары
, приложенную к точке О. То есть мы как бы перенесли заданную силу из точки А в точку О, но при этом появилась пара, образованная силами и . Момент этой пары  , равен моменту заданной силы относительно точки О.
, равен моменту заданной силы относительно точки О.
Этот процесс замены силы равной ей силой и парой называется приведением силы к точке О.
Точка О называется точкой приведения; сила , приложенная к точке приведения, – приведённой силой. Появившаяся пара – присоединённой парой.
Приведение плоской системы сил к данному центру.
Пусть на твердое тело действует какая-нибудь система сил  , лежащих в одной плоскости. Возьмем в этой плоскости произвольную точку О, которую назовем центром приведения, и, перенесем все силы в центр О (рис. 20, а). В результате на тело будет действовать система сил
, лежащих в одной плоскости. Возьмем в этой плоскости произвольную точку О, которую назовем центром приведения, и, перенесем все силы в центр О (рис. 20, а). В результате на тело будет действовать система сил  приложенных в центре О, и система пар, моменты которых будут равны:
приложенных в центре О, и система пар, моменты которых будут равны: 
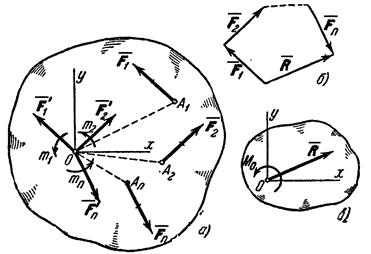
Рис.20
Силы, приложенные в центре О, можно заменить одной силой ,приложенной в том же центре; при этом  или
или
Точно так же, по теореме о сложении пар, все пары можно заменить одной парой, лежащей в той же плоскости. Момент этой пары  или
или  .
.
Величина , равная геометрической сумме всех сил системы, называется, как известно, главным вектором системы; величину М о, равную сумме моментов всех сил системы относительно центра О, будем называть главным моментом системы относительно центра О.
В результате мы доказали следующую теорему: всякая плоская система сил, действующих на абсолютно твердое тело, при приведении к произвольно взятому центру О заменяется одной силой R, равной главному вектору системы и приложенной в центре приведения О, и одной парой с моментом М 0, равным главному моменту системы относительно центра О (рис. 20, в).
Примечания:
1. Для плоской системы сил под главным моментом системы часто также понимают величину этого момента.
2. Очевидно, что главный вектор R0 не зависит, а главный момент M0 зависит от выбора центра приведения.