МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
Белорусский национальный технический университет
Филиал БНТУ «Жодинский государственный политехнический колледж»
КОНТРОЛЬНАЯ РАБОТА
ПО ДИСЦИПЛИНЕ
“Электропривод и автоматика”
Выполнил:
Проверил:
Содержание
Введение......................................................................................................3
Вопрос 1.......................................................................................................4
Вопрос 2.......................................................................................................5
Вопрос 3.......................................................................................................6
Задача 1........................................................................................................7
Задача 2......................................................................................................10
Заключение...............................................................................................13
Перечень использованной литературы...............................................14
Введение
В этой контрольной работе по дисциплине «Электропривод и автоматика» предстоит рассмотреть три вопроса и решить две задачи. В первом вопросе необходимо объяснить построение систем подчинённого регулирования в замкнутых системах управления электрическими приводами. Во втором - схемы включения и режимы работы асинхронного двигателя с короткозамкнутым и фазным ротором. В третьем - автоматические выключатели, их функциональное назначение, устройство и принцип действия. В первой задаче необходимо будет произвести расчеты по электродвигателю постоянного тока, и построить электромеханическую и механическую характеристики электродвигателя. Во второй задаче произвести расчеты по асинхронному электродвигателю с короткозамкнутым ротором и построить графики зависимостей М(S) и М(щ).
Вопрос 1
Замкнутые системы электроприводов строят на основании двух принципов: компенсации внешнего возмущения и устранения отклонения регулируемого параметра от заданного значения. Силовую часть замкнутых систем регулируемого электропривода, как правило выполняют по структуре,,преобразователь-двигатель,, в которой основное управляющее воздействие на электродвигатель оказывает напряжение для ДПТ и частота и напряжение для АД и СД. Для выработки законов управления двигателем, которые реализуются силовым преобразователем, замкнутые системы регурилуемого электропривода содержат дополнительно определённый состав управляющих элементов. Это прежде всего задающие и программные устройства, измерительные преобразователи (датчики) регулируемых координат и технологического процесса, согласующие элементы для соединения всех звеньев электропривода в единую систему.
Вопрос 2
Короткозамкнутая обмотка ротора, часто называемая,,беличье колесо,, или,,беличья клетка,, из за внешней схожести конструкции, состоит из алюминиевых (реже медных, латунных) стержней, замкнутых накоротко с торцов двумя кольцами. Стержни этой обмотки вставляют в пазы сердечника ротора. Сердечники ротора и статора имеют зубчатую структуру. При прямом пуске имеют небольшой пусковой момент и значительный пусковой ток, что является существенным их недостатком. Поэтому их применяют в тех электрических приводах, где не требуются большие пусковые моменты. Именно они являются основным видом двигателей в промышленном электроприводе.
В асинхронных электродвигателях большей мощности и специальных машинах малой мощности для улучшения пусковых и регулировочных свойств применяются фазные роторы. В этих случаях на роторе укладывается трёхфазная обмотка с геометрическими осями фазных катушек, сдвинутыми в пространстве друг относительно друга на 120 градусов. Фазы обмотки соединяются звездой и концы их присоединяются к трём контактным кольцам, насаженным на вал и электрически изолированным как от вала, так и друг от друга. С помощью щёток находящихся в скользящем контакте с кольцами, имеется возможность включать в цепи фазных обмоток регулировочные реостаты. Асинхронный двигатель с фазным ротором имеет лучшие пусковые и регулировочные свойства, однако ему присущи большие масса, размеры и стоимость, чем асинхронному двигателю с короткозамкнутым ротором.
Вопрос 3
Автоматические выключатели являются коммутационными электрическими аппаратами, предназначенными для проведения тока цепи в нормальных режимах и для автоматической защиты электрических сетей и оборудования от аварийных режимов, а также для нечастой коммутации номинальных токов. Благодаря простоте, удобству, безопасности обслуживания и надёжности защиты от токов короткого замыкания эти аппараты широко применяются в электрических установках малой и большой мощности. Автоматические выключатели состоят из следующих основных узлов: контактной системы - (состоит из неподвижных контактов, закреплённых в корпусе, и подвижных контактов, шарнирно посаженных на полуоси рычага механизма управления, и обеспечивает, обычно, одинарный разрыв цепи), дугонасительной системы - (устанавливается в каждом полюсе выключателя и предназначается для локализации электрической дуги в ограниченном объёме. Оно представляет собой дугогасительную камеру с деионной решёткой из стальных пластин. Могут быть предусмотрены также искрогасители, представляющие собой фибровые пластины), расцепителей - (электромагнитных максимальных, тепловых максимальных и полупроводниковых), механизма управления и механизма свободного расцепления - (представляет собой шарнирный трёх или четырёхзвенный механизм, который обеспечивает расцепление и отключение контактной системы как при автоматическом, так и при ручном управлении.
Автоматические выключатели по принципу действия делятся на автоматы максимального тока, понижения напряжения и обратной мощности. При этом каждый автомат снабжается расцепителемм максимального, а в некоторых типах расцепителем минимального напряжения.
Задача 1
По исходным данным рассчитать и построить графики естественных электромеханических и механических характеристик для двигателя постоянного тока независимого возбуждения. Паспортные данные: Pном= 154 кВт; Uном= 385 В; nном= 930 об/мин; Iном= 400 А;
Решение:
Для построения характеристик, представляющих собой прямые линии, достаточно рассчитать координаты двух точек: номинального режима и холостого хода.
Номинальная скорость двигателя определяется по следующей формуле: щном=2• р• nном/60=2• 3,14• 930/60=97,2 рад/с;
Определяем номинальный момент двигателя по следующей формуле: Мном=Рном/ щном= 154000/97,2=1583 Н• м.
Для определения скорости холостого хода опереляем:
кФном=Мном/Iном=1583/400=3,95 В• с
Тогда скорость идеального холостого хода определим по формуле:
щ0=Uном/кФном=385/3,95=97,5 рад/с
По координатам точек холостого хода и номинального режима строим естественные электромеханическую и механическую характеристики.

Рисунок 1 Электромеханическая характеристика щ(I)
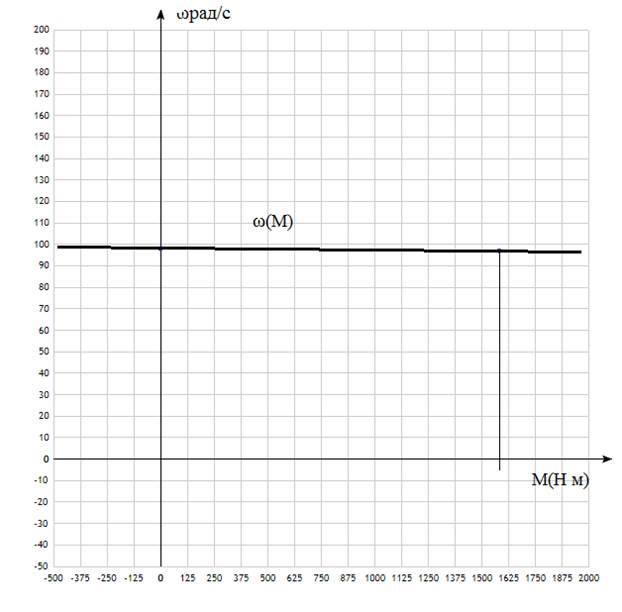
Рисунок 2 Механическая характеристика щ(М)
Задача 2
По исходным данным рассчитать естественную механическую характеристику асинхронного двигателя и по полученным данным построить графики М(S), М(щ). Асинхронный двигатель с короткозамкнутым ротором имеет следующие паспортные данные: Pном= 15 кВт; nном= 1465 об/мин; I1ном=29,3А; лм=Мк/Мном=2,3; л1=I1н/I1ном=7; p=2; f1ном=50Гц; U1ном=380В.
Решение:
Определяем номинальную скорость по следующей формуле щном=2• р• nном/60=2• 3,14• 1465/60=153,34 рад/с;
Определим скорость холостого хода, номинальные момент и скольжение:
щ0=(2• р• f1ном)/2=2• 3,14• 50/2=157рад/с;
Мном=Рном/ щном= 15000/153,34 =98 Н• м;
Sном=(щ0- щном)/ щ0=(157-153,34)/157=0?025.
Полученных данных достаточно для приближенного построения механической характеристики АД по двум точкам – номинальной (щном, Мном) и холостого хода (щ0, 0).
Для получения полной механической характеристики продолжим расчет. Определяем критический момент асинхронного двигателя:
Мк= лм • Мном=2,3• 98=255 Н• м;
Критическое скольжение асинхронного двигателя определяем по формуле:
Подставим найденные значения Мк и Sк в формулу:
М=2• Мк/(S/ Мк + Мк /S)=2• 225(S/0,11+0,11/S).
Задаваясь значением S от 1 од 0, определим по таблице соответствующее значение момента.
Угловую скорость для различных значений S определяем по формуле:
щ= щ0• (1-S)=157• (1-S).
Полученные результаты вычислений сводим в таблицу:
| S | 0,8 | 0,6 | 0,4 | 0,2 | 0,11 | ||
| щ, рад/c | 125,5 | 139,7 | |||||
| М, Н• м |
По полученным данным построим графики зависимости М(S) и М(щ).

Рисунок 3 График зависимости М(S)
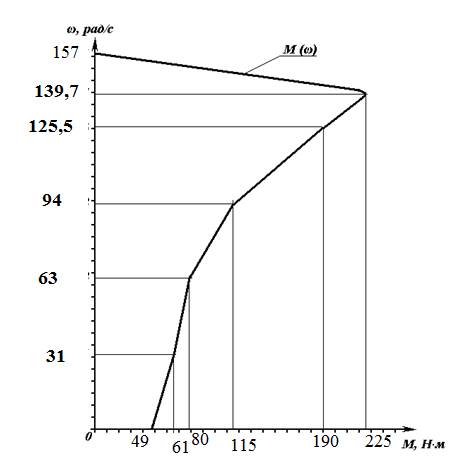
Рисунок 3 График зависимости М(щ)
Заключение
В результате проделанной работы были решены две задачи. Были рассмотрены вопросы построения систем подчинённого регулирования в замкнутых системах управления электрическими приводами. Схемы включения и режимы работы асинхронного двигателя с короткозамкнутым и фазным ротором. И Автоматические выключатели, их функциональное назначение, устройство и принцип действия. В первой задаче произведены расчеты по электродвигателю постоянного тока и построены электромеханическая и механическая характеристики. Во второй задаче произведены расчеты по асинхронному электродвигателю с короткозамкнутым ротором и построены графики зависимости М(S) и М(щ).
Перечень использованной литературы
1.Беспалов В. Я., Котеленец Н. Ф. Электрические машины; Академия - Москва, 2013. - 320 c.
2.Копылов И. П. Электрические машины; Высшая школа - Москва, 2006. - 608 c.
3.Рихтер Р. Электрические машины; Книга по Требованию - Москва, 2012. - 633 c.