Классификация автоматических регуляторов.
По способу воздействия на регулирующий орган автоматические регуляторы бывают прямого и непрямого действия. В регуляторах прямого действия чувствительный элемент непосредственно воздействует на регулирующий орган, используя при этом энергию, получаемую от регулируемой среды. У них измерительное устройство и исполнительный механизм составляют одно целое с регулирующим органом и воздействуют на него посредством механических связей. Основной недостаток регуляторов прямого действия—непригодность к дистанционному управлению.
В регуляторах непрямого действия, расположенныхна значительном удалении от регулирующих органов, управление регулирующим органом производится с помощью энергии, получаемой от постороннего источника.
По виду энергии, приводящей их в действие, регуляторы подразделяют на пневматические, гидравлические, электрические и комбинированные.
В пневматических регуляторах используется энергия сжатого воздуха. Эти регуляторы надежны в работе и безопасны в пожарном отношении.
В гидравлических регуляторах используется энергия жидкости (масла или воды). Они надежны в работе и могут развивать большие перестановочные усилия на исполнительном механизме. Одна- ко имеют ряд недостатков: ограниченный радиус действия, определяемый длиной импульсного трубопровода, зависимость рабочих характеристик от температуры рабочей жидкости и огнеопасность (в случае использования масла).
Наибольшее распространение получили электрические регуляторы, которые подразделяют на электромеханические и электронные. Основное преимущество электрических регуляторов по сравнению с пневматическими и гидравлическими—возможность передачи командных импульсов к промежуточным устройствам и исполнительному механизму на практически неограниченные расстояния с минимальным запаздыванием.
В комбинированных регуляторах одновременно используются два вида энергии: в электропневматических—электрическая энергия и сжатый воздух, в электрогидравлических—электрическая энергия и жидкость, в пневмогидравлических—сжатый воздух и жидкость. Такая комбинация позволяет максимально использовать преимущества каждого вида энергии.
По характеру регулирующего воздействия автоматические регуляторы подразделяют на несколько видов.
Позиционные регуляторы. Регулирующий орган может занимать два или три определенных положения. Наибольшее применение получили двух- и трехпозиционные регуляторы.
Пропорциональные (статические) регуляторы. Регулирующий орган изменяет свое положение по такой же закономерности, по какой изменяется регулируемая величина; скорость перемещения регулирующего органа пропорциональна скорости изменения регулируемой величины.
Астатические регуляторы. Регулирующий орган при отклонении регулируемой величины от заданного значения перемещается более или менее медленно и все время в одном направлении до
тех пор, пока регулируемая величина не придет к заданному значению.
Изодромные регуляторы. Совмещают свойства статического и астатического регуляторов и обеспечивают поддержание заданного значения регулируемой величины без остаточного отклонения. Регулирующий орган может занимать любое положение в пределах своего рабочего хода.
Регуляторы, с предварением. Имеют дополнительное устройство, благодаря которому процесс регулирования протекает с учетом скорости изменения регулируемой величины. В этих регуляторах к пропорциональному действию добавляется дополнительное воздействие от скорости изменения регулируемой величины, которое заставляет перемещаться регулирующий орган с некоторым опережением, возрастающим с увеличением скорости изменения регулируемой величины. С уменьшением скорости изменения регулируемой величины это опережающее перемещение также уменьшается и полностью прекращается, когда регулируемая величина перестает изменяться.
Пневматические, электрические преобразователи.
Принцип действия пневматических преобразователей (рис. 4, а) основан на пневматической силовой компенсации. Измеряемая величина воздействует на чувствительный элемент измерительного блока 8 и преобразуется в усилие Р, которое через рычажную систему 1пневмосилового преобразователя уравновешивается усилием Рос сильфона обратной связи. При изменении измеряемой величины и усилия Р происходит незначительное перемещение рычажной системы и связанной с ней заслонки 4. Чувствительный индикатор рассогласования 5 типа «сопло-заслонка» преобразует это перемещение в управляющий сигнал давления сжатого воздуха, поступающий на вход пневматического усилителя 6.
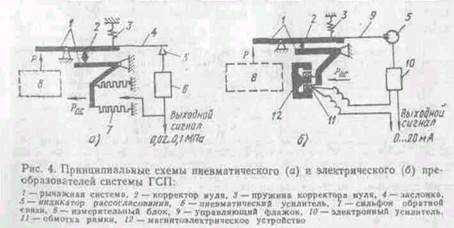 Выходной сигнал усилителя поступает в линию дистанционной передачи и одновременно в сильфон обратной связи 7 пневмосилового преобразователя, где преобразуется в пропорциональное усилие Ро.с, которое через рычажную систему уравновешивает измеряемое (входное) усилие Р. Таким образом, мерой измеряемого усилия Р является значение выходного сигнала преобразователя, необходимое для создания уравновешивающего усилия обратной связи Р о.с. Пределы изменения выходного сигнала 0,02—0,1 МПа. Настраивают преобразователь корректором нуля 2, а начальное значение выходного сигнала преобразователя (0,02 МПа) устанавливают с помощью пружины 3 корректора нуля.
Выходной сигнал усилителя поступает в линию дистанционной передачи и одновременно в сильфон обратной связи 7 пневмосилового преобразователя, где преобразуется в пропорциональное усилие Ро.с, которое через рычажную систему уравновешивает измеряемое (входное) усилие Р. Таким образом, мерой измеряемого усилия Р является значение выходного сигнала преобразователя, необходимое для создания уравновешивающего усилия обратной связи Р о.с. Пределы изменения выходного сигнала 0,02—0,1 МПа. Настраивают преобразователь корректором нуля 2, а начальное значение выходного сигнала преобразователя (0,02 МПа) устанавливают с помощью пружины 3 корректора нуля.
Питание пневматических преобразователей производят очищенным от пыли, влаги и масла воздухом, номинальное избыточное давление которого 0,14 МПа. Тип МС-П
Принцип действия электрических преобразователей (рис. 4, б) основан на электрической силовой компенсации. Измеряемая величина (например, давление, расход) воздействует на чувствительный элемент измерительного блока и преобразуется в усилие Р, которое через рычажную систему 1 электросилового преобразователя уравновешивается усилием Ро.с магнитоэлектрического устройства обратной связи.
При изменении измеряемой величины и усилия Р происходит незначительное (микронное) перемещение рычажной системы и связанного с ней управляющего флажка 9 индикатора рассогласования 5. Индикатор рассогласования дифференциально-трансформаторного типа преобразует это перемещение в управляющий сигнал (напряжение переменного тока), поступающий на вход электронного усилителя 10.
Выходной сигнал постоянного тока усилителя поступает в линию дистанционной передачи и одновременно в последовательно соединенную с ней обмотку 11 рамки магнитоэлектрического устройства 12 электросилового преобразователя, где преобразуется в усилие обратной связи Ро.с. Это усилие через рычажную систему уравновешивает измеряемое (входное) усилие Р. Таким образом, мерой измеряемого усилия Р является постоянный ток, необходимый для создания уравновешивающего усилия обратной связи Ро.с. Пределы изменения выходного сигнала постоянного тока 0—20,0—5, 4-20 мА.
Настраивают преобразователь изменением передаточного отношения рычажной системы путем перемещения корректора нуля 2. Начальное значение, выходного сигнала преобразователя устанавливают с помощью пружины 3 корректора нуля.