Лазерный гироскоп
Представляет собой кольцевой резонатор с тремя или четырьмя зеркалами, расположенными по углам треугольника или квадрата (рисунок 2). Два лазерных пучка, генерируемые в самой системе, проходят по резонатору в противоположных направлениях. Интерферируя, они дают картину из светлых и темных пятен. Эта картина сохраняет свое положение в пространстве, и при повороте резонатора (корпуса гироскопа) фотоприемник регистрирует поворот, считая пробегающие по нему пятна.
Работе лазерного гироскопа вредит обратное рассеяние, т.е. рассеяние лазерного луча на поверхностях зеркал и на молекулах газа, встречающихся на пути луча. Обратное рассеяние нарушает картину пятен таким образом, что она поворачивается вместе с корпусом. Устранение и сведение к минимуму обратного рассеяния требуют высочайшей точности при проектировании и изготовлении лазерных гироскопов.

Рисунок 3
Волоконно-оптический гироскоп (рис. 4)действует по принципу интерферометра Саньяка. Свет в нем направляется по замкнутому пути с помощью оптического волновода. Для увеличения длины оптического пути и повышения чувствительности гироскопа оптическое волокно свернуто в спираль. В волоконно-оптическом гироскопе используется внешний лазерный источник света. И здесь обратное рассеяние остается серьезной проблемой.
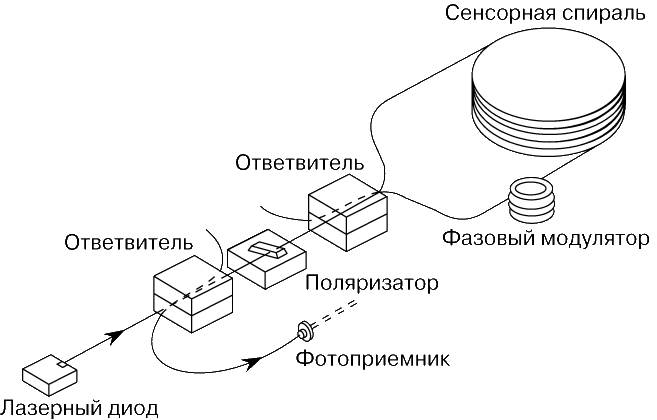
Рис 4
Достоинства и недостатки.
Поскольку системы инерциальной навигации автономны, на их работе не сказываются погодные условия. Они не поддаются радиоэлектронному подавлению и обеспечивают скрытность (не генерируют электромагнитного излучения, выдающего присутствие летательного аппарата).
Одним из недостатков систем инерциальной навигации является то, что их необходимо настраивать (выставлять) не только по скорости и местоположению, но и по пространственному положению (ориентации относительно заданной базы, например горизонта). Пространственное положение можно задать, пользуясь акселерометрами для определения направления вертикали и гироскопами для определения вращения Земли. Этими векторами определяются оси опорной системы координат (но только не в том случае, когда объект находится на Южном или Северном полюсе; в этом случае направление вертикали коллинеарно оси земного вращения и система не может определить азимут). Процесс выставки занимает несколько минут или более. Общее правило таково, что чем меньше время выставки, тем ниже чувствительность и точность системы.
Большим недостатком системы инерциальной навигации является то, что ее ошибка со временем накапливается. Это обусловлено интегрирующим действием самой системы. Скорость вычисляется интегрированием ускорения, и постоянная ошибка ускорения преобразуется в непрерывно нарастающую ошибку скорости. В связи с ошибками гироскопа возникают ошибки направления при измерении кажущегося ускорения и ускорения свободного падения, что тоже приводит к нарастанию дополнительных ошибок.
Вспомогательные навигационные средства.
Если накопленная ошибка становится слишком большой, ее можно корректировать с помощью внешних вспомогательных средств. Конечно, тогда система становится неавтономной. К внешним навигационным средствам относятся доплеровские радиолокационные станции, системы астроориентации, радиолокационные средства определения местоположения, навигационные спутники и различные электронные системы наземного базирования («Такан», «Лоран», «Омега»).
Для оптимального использования данных, поступающих от внешних вспомогательных средств, нужно, чтобы тщательно учитывались характеристики и погрешности этих и бортовых навигационных средств. Оптимальное объединение данных разных источников обеспечивает «обобщенный фильтр Калмана», названный по имени американского математика венгерского происхождения Ф.Калмана, опубликовавшего в 1961 свой метод фильтрации. Эта вычислительная процедура представляет собой алгоритм, допускающий компьютерную реализацию. Он применяется почти во всех инерциальных навигационных системах.
ГИРОСКОП
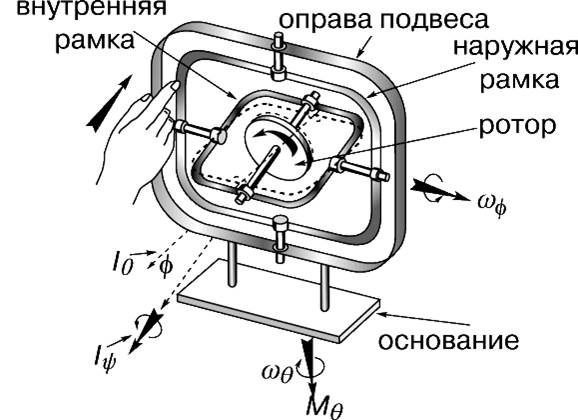
ГИРОСКОП, навигационный прибор, основным элементом которого является быстро вращающийся ротор, закрепленный так, что ось его вращения может поворачиваться. Три степени свободы (оси возможного вращения) ротора гироскопа обеспечиваются двумя рамками карданова подвеса. Если на такое устройство не действуют внешние возмущения, то ось собственного вращения ротора сохраняет постоянное направление в пространстве. Если же на него действует момент внешней силы, стремящийся повернуть ось собственного вращения, то она начинает вращаться не вокруг направления момента, а вокруг оси, перпендикулярной ему (прецессия).
В хорошо сбалансированном (астатическом) и достаточно быстро вращающемся гироскопе, установленном на высокосовершенных подшипниках с незначительным трением, момент внешних сил практически отсутствует, так что гироскоп долго сохраняет почти неизменной свою ориентацию в пространстве.
Поэтому он может указывать угол поворота основания, на котором закреплен. Именно так французский физик Ж.Фуко (1819–1868) впервые наглядно продемонстрировал вращение Земли. Если же поворот оси гироскопа ограничить пружиной, то при соответствующей установке его, скажем, на летательном аппарате, выполняющем разворот, гироскоп будет деформировать пружину, пока не уравновесится момент внешней силы. В этом случае сила сжатия или растяжения пружины пропорциональна угловой скорости движения летательного аппарата. Таков принцип действия авиационного указателя поворота и многих других гироскопических приборов. Поскольку трение в подшипниках очень мало, для поддержания вращения ротора гироскопа не требуется много энергии. Для приведения его во вращение и для поддержания вращения обычно бывает достаточно маломощного электродвигателя или струи сжатого воздуха.
Применение.
Гироскоп чаще всего применяется как чувствительный элемент указывающих гироскопических приборов и как датчик угла поворота или угловой скорости для устройств автоматического управления. В некоторых случаях, например в гиростабилизаторах, гироскопы используются как генераторы момента силы или энергии.
Основные области применения гироскопов – судоходство, авиация и космонавтика. Почти каждое морское судно дальнего плавания снабжено гирокомпасом для ручного или автоматического управления судном, некоторые оборудованы гиростабилизаторами. В системах управления огнем корабельной артиллерии много дополнительных гироскопов, обеспечивающих стабильную систему отсчета или измеряющих угловые скорости. Без гироскопов невозможно автоматическое управление торпедами. Самолеты и вертолеты оборудуются гироскопическими приборами, которые дают надежную информацию для систем стабилизации и навигации. К таким приборам относятся авиагоризонт, гировертикаль, гироскопический указатель крена и поворота. Гироскопы могут быть как указывающими приборами, так и датчиками автопилота. На многих самолетах предусматриваются гиростабилизированные магнитные компасы и другое оборудование – навигационные визиры, фотоаппараты с гироскопом, гиросекстанты. В военной авиации гироскопы применяются также в прицелах воздушной стрельбы и бомбометания.
Гироскопы разного назначения (навигационные, силовые) выпускаются разных типоразмеров в зависимости от условий работы и требуемой точности. В гироскопических приборах диаметр ротора составляет 4–20 см, причем меньшее значение относится к авиационно-космическим приборам. Диаметры же роторов судовых гиростабилизаторов измеряются метрами.
ОСНОВНЫЕ ПОНЯТИЯ
Гироскопический эффект создается той же самой центробежной силой, которая действует на юлу, вращающуюся, например, на столе. В точке опоры юлы о стол возникают сила и момент, под действием которых ось вращения юлы отклоняется от вертикали, а центробежная сила вращающейся массы, препятствуя изменению ориентации плоскости вращения, вынуждает юлу вращаться и вокруг вертикали, сохраняя тем самым заданную ориентацию в пространстве.
Таким вращением, называемым прецессией, ротор гироскопа отвечает на приложенный момент силы относительно оси, перпендикулярной оси его собственного вращения. Вклад масс ротора в этот эффект пропорционален квадрату расстояния до оси вращения, поскольку чем больше радиус, тем больше, во-первых, линейное ускорение и, во-вторых, плечо центробежной силы. Влияние массы и ее распределения в роторе характеризуется его «моментом инерции», т.е. результатом суммирования произведений всех составляющих его масс на квадрат расстояния до оси вращения. Полный же гироскопический эффект вращающегося ротора определяется его «кинетическим моментом», т.е. произведением угловой скорости (в радианах в секунду) на момент инерции относительно оси собственного вращения ротора.
Кинетический момент – векторная величина, имеющая не только численное значение, но и направление. На рис. 1 кинетический момент представлен стрелкой (длина которой пропорциональна величине момента), направленной вдоль оси вращения в соответствии с «правилом буравчика»: туда, куда подается буравчик, если его поворачивать в направлении вращения ротора.
Прецессия и момент силы тоже характеризуются векторными величинами. Направление вектора угловой скорости прецессии и вектора момента силы связано правилом буравчика с соответствующим направлением вращения.