В реальных условиях выработка заданной функции положения механизма ψ0 осуществляется не теоретическим, а так называемым действительным механизмом, функция положения которого ψд ≠ ψ0. Это неравенство является следствием наличия в действительных механизмах ОА1В' (рисунок 1.32, а) так называемых первичных ошибок ∆ pi - отклонений размеров звеньев и формы геометрических элементов. Разницу в положениях ведомых звеньев 3 действительного и соответствующего теоретического механизмов при одинаковых положениях ведущих звеньев 1обоих механизмов принято называть ошибкой положения механизма:
 |
Δψп = ψд (q + p 1 + Δ p 1, p 2 + Δp2, ..., p m + Δ p m ) -
- ψ0 (q, p 1, p 2,..., p m ) = Δψп (Δ p 1, Δp2, ..., Δ p m ). (1.33)
В каждом положении механизма (или в некоторых) общая погрешность выработки действительным механизмом заданной функции не должна превышать некоторого допустимого значения [Δψ] т. е.
Δψ = Δψт + Δψп≤ [Δψ] (1.34)
Из уравнения (1.34) следует, что общая для механизма допустимая ошибка положения [Δψ] должна быть рационально разделена на две части: [Δψ] = [Δψ]т + [Δψ]п, одна из которых, [Δψ]т, относится к теоретической ошибке, а вторая, [Δψ]п, - к ошибке положения, обусловленной неточностью изготовления звеньев. Если в рассматриваемом положении ввод в механизм обобщенной координаты сопровождается ошибкой Δ q (рисунок 1.32, б), то разница в положениях ведомых звеньев действительного ОА'В' и соответствующего теоретического механизмов отличается от Δψп перемещением ведомого звена, вызванного ошибкой Δ q = (q + Δ q) - q. Разница Δψп.п=ψ*-ψ0* в положениях ведомых звеньев действительного и соответствующего теоретического механизмов, возникающая от неточности изготовления звеньев и ошибки ввода обобщенной координаты, называется полной ошибкой положения или ошибкой положения ведомого звена:
Δψп.п = Δψп.п (Δ q, Δ p 1, Δp2, ..., Δ p m ) (1.35)
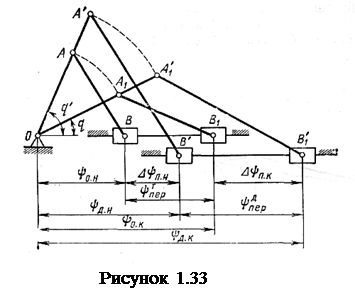
Посредством ошибки положения производится оценка точности выработки абсолютного значения заданной функции. При относительных методах измерения воспроизводимой функции точность механизма оценивается ошибкой перемещения - разностью Δψп.ер = ψдпер - ψтпер перемещений ведомых звеньев действительного ψдпер и соответствующего теоретического ψтпер механизмов при одинаковом перемещении ведущих звеньев этих механизмов в интервале от q н до q к. Так как (рисунок 1.33)
ψд пер = ψд.к - ψд.н, а ψтпер = ψо.к - ψо.н, то Δψпер = ψд.к - ψд.н - ψо.к + ψо.н = (ψд.к -ψо.к ) - (ψд.н - ψо.н ),
или Δψпер = Δψп.к - Δψп.н, (1.36)
т. е. ошибка перемещения в диапазоне изменения обобщенной координаты от q н до q к равна разности ошибок положения механизма в конце и начале движения. Ошибка перемещения ведомых звеньев действительного и соответствующего теоретического механизмов, обусловленная не только первичными ошибками, но и неточностью ввода обобщенной координаты в начале и конце движения, называется полной ошибкой перемещения или ошибкой перемещения ведомого звена:
Δψп пер = Δψк п.п - Δψн п.п, (1.37)
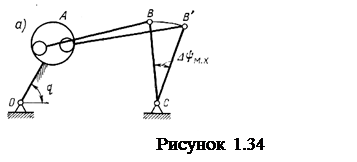
В реверсивных механизмах важное значение имеет ошибка перемещения, называемая ошибкой мертвого хода Δψм.х. Она возникает при реверсе, т. е. при изменении направления движения ведущего звена вследствие наличия зазоров в кинематических парах (рисунок 1.34, а) и упругих деформаций звеньев (рисунок 1.34, б). Иначе говоря, ошибка мертвого хода — это отставание ведомого звена при изменении направления движения ведущего звена. Значение Δψм.х можно определять как ошибку перемещения по формуле (1.36) при условии, что ошибки положения в конце Δψп.к и начале Δψп.н
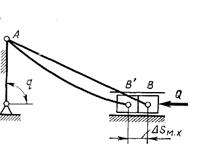 движения вычисляются для одного и того же положения ведущего звена (q), но при другом направлении его движения. Вследствие первичных ошибок в действительном механизме значения его передаточных функций также будут иметь ошибки.
движения вычисляются для одного и того же положения ведущего звена (q), но при другом направлении его движения. Вследствие первичных ошибок в действительном механизме значения его передаточных функций также будут иметь ошибки.
 |
Ошибка первой передаточной функции (аналога скорости)

 (1.38)
(1.38)
Ошибка второй передаточной функции (аналога ускорения)
 (1.39)
(1.39)
Из-за наличия ошибок передаточных функций скорости и ускорения звеньев действительного и соответствующего теоретического механизмов будут разными. Ошибка скорости ведомого звена
Δψ = ψд – ψ 0 = (d ψд /d q) q - (d ψ0 /d q) q= Δ(d ψ /d q) q. (1.40)
Ошибка ускорения:
Δψ = ψд – ψ 0 = (d2 ψд /d q 2) q 2 - (d2 ψ0 /d q 2) q 2 = Δ(d2 ψ /d q 2) q 2.(1.41)
Наличие ошибок скорости и ускорения приводит к возникновению в механизмах дополнительных сил инерции и соответствующих им реактивных сил в кинематических парах.
Первичные ошибки
Первичными ошибками (ПО) называются отклонения от номинальных значений в координатах, которыми однозначно определяются размеры геометрических элементов звена и их взаимное расположение. Они возникают при изготовлении деталей звеньев (технологические ПО) и в процессе эксплуатации механизмов (температурные, силовые и износные ПО). Решающую роль в образовании ошибки положения механизма играют технологические ПО, к которым обычно приводятся и другие ошибки.
Первичные ошибки делятся на скалярные и векторные, систематические и случайные, действующие и недействующие.
Скалярные первичные ошибки (СПО) относятся к параметрам звена, имеющим определенное номинальное значение (например, ошибка размера звена). В конкретном экземпляре одинаковых механизмов данной партии каждая скалярная ошибка имеет вполне определенные значение, знак и направление; во всей партии та же ошибка случайна, так как ее размер изменяется в пределах допуска от одного экземпляра к другому.
Векторные первичные ошибки (ВПО) характеризуются модулем и направлением. Они относятся к нулевым параметрам механизмов, т. е. к параметрам, номинальные значения которых равны нулю (эксцентриситеты, перекосы). ВПО всегда случайны, так как их направления становятся известными только после образования.
Возможное число первичных ошибок в звене определяется числом геометрических элементов и числом ПО в каждом элементе. Положение элемента звена в произвольно выбранной системе координат (х, у, z) определяется некоторым числом параметров. Каждый параметр имеет неточность, поэтому число скалярных первичных ошибок элемента равно числу его параметров.
Определим, например, число возможных СПО элемента звена вращательной пары, образуемой одной цилиндрической 1 и двумя плоскими 2 поверхностями (рисунок 1.35, а). Цилиндрическая поверхность 1 может иметь пять СПО (рисунок 1.35, б): Δr, Δ y А, Δ z А, Δ x В и Δ у В, а плоские - по три (рисунок 1.35, в): Δ x, Δ у, Δ z. Следовательно, искомое число возможных СПО равно 11, т. е. 5 + 3 + 3. Число СПО в звене может быть уменьшено, если отсчет номинальных размеров вести не от осей произвольно выбранной системы координат, а от линий или поверхностей звена, принятых за базу. Рассмотрим, например, звено рычажного типа (коромысло, шатун, кривошип). Если такое звено входит в две вращательные пары, то общее число его СПО в произвольной системе координат (рисунок 1.36, а) будет 2·11 = 22. Если же ось z направить по оси одного элемента, а ось х - так, чтобы она пересекала ось второго элемента (рисунок 1.36, б), то в первом элементе останется шесть СПО, а во втором - десять. Общее число СПО рассматриваемого звена будет 6 + 10 = 16.
 |
Не все первичные ошибки в равной степени влияют на образование ошибки положения. В кулачковом механизме (рисунок 1.37, а), например, ошибка радиус-вектора Δ r вызывает отклонение функции положения от ее теоретического значения S o(φ) на Δ S Δ r =Δ r sinφ, тогда как частная ошибка Δ S Δ b = (Δ b /2) sin γ проявляет себя только при перекосе оси кулачка 1 (рисунок 1.37, б), а ошибка Δ S' Δ b = (Δ b /2) tg γ - при перекосе толкателя 2 (рисунок 1.37, в). Очевидно, что частная ошибка Δ S Δ r может быть значительной, тогда как ошибки Δ S Δ b и Δ S 'Δ b на порядок меньше, так как угол перекоса γ мал по сравнению с φ.
 |
Первичные ошибки, вызывающие соизмеримые частные ошибки положения, называются действующими (ДПО). Действующую ПО, которая дает наибольшую частную ошибку положения, называют доминирующей. Недействующими называются ПО, дающие по сравнению с другими частные ошибки положения более высокой степени малости. В плоских механизмах к недействующим относятся те ПО, которые расположены в плоскости, перпендикулярной плоскости вращения. В рассмотренном выше звене рычажного типа (рисунок 1.36, б) 11 ошибок торцовых поверхностей являются недействующими (5 в одном элементе и 6 в другом). Поэтому звено рычажного типа имеет всего 16 - 11 = 5 ошибок: отклонения радиусов Δ r 1 и Δ r 2, расстояния между осями Δ l и две ошибки перекоса оси второго элемента в плоскостях xz и yz. Аналогично можно определить и число ДПО в других звеньях.
 |
В собранном механизме общее число ДПО обычно меньше суммы ДПО звеньев. Это является следствием объединения некоторых ДПО. Так, например, две ошибки радиусов во вращательной паре обращаются в одну ошибку эксцентриситета, которую можно разложить по направлениям звеньев и каждую из составляющих рассматривать в сумме с ошибкой размера звена как одну СПО.
Все действующие первичные ошибки делят на две группы:
1) ПО, влияние которых на образование ошибки положения может быть полностью или частично скомпенсировано последством регулировки механизма при сборке. Для этого в механизме предусматривают специальные устройства – компенсаторы, позволяющие изменять во время сборки механизма отклонения одного или нескольких параметров в ту или иную сторону с целью компенсировать влияние отклонений остальных параметров, т.е. производят регулировку механизма.
2) ПО, которые не могут быть скомпенсированы - это местные искажения контактирующих поверхностей. Закономерности их изменения установить не всегда удается, поэтому в конкретном механизме возникновение этих ошибок обычно предупреждают конструктивными средствами: введением в цепь упругих элементов и выборкой с их помощью зазоров в кинематических парах, демпфированием и др.