Общие сведения
Нагрузочный момент грузоподъемных механизмов является потенциальным, т.е. не меняет своего направления при изменении направления движения. При подъеме груза двигатель работает в двигательном режиме. Энергия из сети накапливается в грузе как потенциальная энергия, часть ее теряется в двигателе и редукторе. Это справедливо и для мощностей

где
Рс - мощность, потребляемая из сети;
Рмех - механическая мощность;
 - к-п. д. соответственно двигателя и редуктора
- к-п. д. соответственно двигателя и редуктора
Мощность на валу двигателя можно оценить как:

Механическая мощность Рмех равна:

где: Gгp - сила веса (н)
V - скорость подъема (м/с)
Момент на. валу барабана Мб равен:

 - скорость вращения барабана /(с)
- скорость вращения барабана /(с)
Зная скорость подъела груза V и диаметр барабана D6, можно
Определить :

Момент яз. валу двигателя при подъеме равен:

 - передаточное число редуктора.
- передаточное число редуктора.
Скорость вращения двигателя равна:

Измерив ток в якоре и напряжение на его зажимах, а также скорость подъёма груза в установившемся режиме получаем точку электромеханической характеристики.
Отключив цепь возбуждения и подав питание на двигатель в режиме подъёма, определяем пусковой ток Iп1 ( =0). Измерив напряжение на зажимах якоря DUЯ1, рассчитываем сопротивление якорной цепи RЯ:
=0). Измерив напряжение на зажимах якоря DUЯ1, рассчитываем сопротивление якорной цепи RЯ:
RЯ = DUЯ1 / IП1
По двум точкам Iп1, =0 и I1,  строим электромеханическую характеристику (I) при подъеме при включенном пусковом сопротивлении RП.
строим электромеханическую характеристику (I) при подъеме при включенном пусковом сопротивлении RП.
Величина противо э.д.с. при подъёме равна:
Повторив эксперимент для режима RП = 0, строим естественную характеристику по точкам Iп2, =0 и I2, 
Измерив ток и скорость при опускании груза в установившемся режиме IТ,  , строим электромеханическую характеристику при спуске груза.
, строим электромеханическую характеристику при спуске груза.
Добавочное сопротивление RД можно рассчитать исходя из соотношений:
 ,
,  ,
, 
Описание установки
Лабораторный стенд состоит из лебедки (кинетическая схема рис.1) и панели управления. На лебедке установлен двигатель постоянного тока М со встроенным электромагнитным тормозом LT.
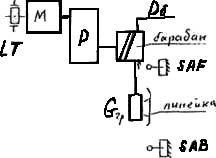 Передаточное число редуктора Р равно i = 26. Диаметр барабана D6 = 0,07 м. Габариты груза Grp-245 х 115 х 9 мм, материал - стал удельный вес Q - 7,8. Высота подъема Н = 1065 мм. На направляющих перемещения груза установлены конечные выключатели: SAF и SAB, которые предназначены
Передаточное число редуктора Р равно i = 26. Диаметр барабана D6 = 0,07 м. Габариты груза Grp-245 х 115 х 9 мм, материал - стал удельный вес Q - 7,8. Высота подъема Н = 1065 мм. На направляющих перемещения груза установлены конечные выключатели: SAF и SAB, которые предназначены
Рис.1 для отключения лебёдки в крайних положениях линейкой.

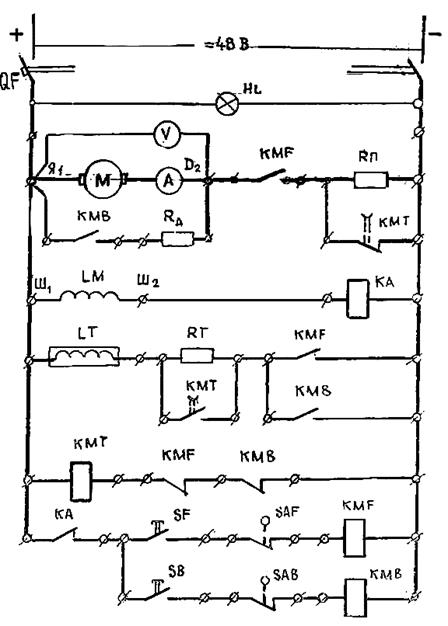
 На панели управления смонтированы аппараты: управления и резисторы - Для удобства сборки схемы концы обмоток резисторов и контактов вынесены на клеммы. Схема обеспечивает пуск двигателя при подъеме в одну ступень и спуск груза в режиме динамического торможения. Лебедка управляется кнопками SF (вперед, вверх) и BS (назад, вниз).
На панели управления смонтированы аппараты: управления и резисторы - Для удобства сборки схемы концы обмоток резисторов и контактов вынесены на клеммы. Схема обеспечивает пуск двигателя при подъеме в одну ступень и спуск груза в режиме динамического торможения. Лебедка управляется кнопками SF (вперед, вверх) и BS (назад, вниз).
Порядок выполнения работы
Ознакомиться с назначением и расположением электрооборудования. Изучить схему управления (рис.2) и назначение аппаратов управления. Собрать схему и убедиться в ее работоспособности.
Для построения электромеханических характеристик и расчета требуемых параметров необходимо провести ряд экспериментов.
1.Установить груз в нижнее положение. Удерживая рукой контактор КМТ во включенном положении, включить двигатель на подъем (RП ¹ 0) и измерить время подъема t1, до срабатывания SAF. Измерить ток в якоре в установившемся режиме I1, и напряжение на зажимах якоря U1. Рассчитать
2. Включить лебедку на спуск груза. Измеряют ток в установившемся режиме IТ и время спуска tТ. Рассчитывают
3- Из нижнего положения груза включают двигатель на подъем кнопкой SF по нормальной схеме (RП = 0). Измеряют ток I2, U2 в установившемся режиме и время подъема t2. Рассчитывают скорость двигателя .
4. Опустить груз в нижнее положение. Разомкнуть цепь тормоза LT. Удерживая КМТ во включенном положении нажать SF и измерить пусковой ток на первой ступени. Отпустив КМТ, измеряют пусковой ток (RП = 0) - Iп2
Содержание отчёта
Представить схему управления и кинематическую схему лебёдки. Рассчитать и представить электромеханические характеристики лебёдки при подъёме и спуске. Рассчитать э.д.с. и моменты электродвигателя при подъёме и спуске (соответственно  ), а так же моменты при пуске. Мощности потребляемые из сети, механическую мощность.
), а так же моменты при пуске. Мощности потребляемые из сети, механическую мощность.
Составили:
проф., к.т.н. А.К. Алексеев
доц., к.т.н. В.И. Серкутан
Зав. кафедрой автоматизации
энергетических систем и эл.
привода, проф., д.т.н. В.Н. Кравченко
Рецензент:
проф., к.т.н. В.Я. Притужалов
Утверждено на заседании кафедры автоматизации энергетических систем и электропривода.
Протокол №