Московский Киновидеоинститут ФилиалСанкт-Петербургского Государственного Университета Кино и Телевидения
Курсовая работа
По дисциплине «Основы теории цепей»
специальность «Аудиовизуальная Техника»
студенческий билет №
вариант 4
Выполнил: студент 2-го сокр. курса
Преподаватель: Слепцов В.В.
Москва 2011 год.
Содержание
Введение 2
1. Исходные данные 3
2. Расчет реальной ЛАЧХ 4
3. Расчет активного фильтра на операционных усилителях 7
Заключение 11
Список литературы 12
Введение
Целью курсовой работы является расчет реальной ЛАЧХ фильтра и определение передаточной функции устройства, изучение особенностей расчета электрических цепей с активными элементами. По полученным данным необходимо также выполнить анализ свойств активных полосовых фильтров в частотной области с их реализацией на базе типовых схем операционных усилителей.
Исходные данные
Задание: идеальная ЛАЧХ для расчета фильтра
Вариант №2

Расчет реальной ЛАЧХ
Реальная асимптотическая ЛАЧХ состоит из отрезков прямых, проходящих с различными углами наклона по отношению к оси абсцисс. Переходная часть характеристики формируется из отрезков с углом наклона, кратным ±2*(20) дВ/дек, а установившаяся часть – 0*(20) дВ/дек.
Реальная ЛАЧХ представлена на рис.1. Участок в диапазоне 106 – 107 Гц (1 декада) и далее не имеет отрезка с углом наклона 0. Начало НЧ-участка ограничиваем значением К = 0,01.
 Рисунок 1. Реальная ЛАЧХ полосового фильтра
Рисунок 1. Реальная ЛАЧХ полосового фильтра
Определяем угловые частоты участков идеальной ЛАЧХ:
Находим постоянные времени  участков реальной ЛАЧХ:
участков реальной ЛАЧХ:

Постоянные времени звеньев:

Расчет активного фильтра на операционных усилителях
Составляем передаточную функцию фильтра, формируя элементы с показателем наклона (+2) в числителе, а наклона (-2) – в знаменателе. Показатель степени элемента будет равен показателю наклона участка ЛАЧХ. Преобразуем выражение таким образом, чтобы выделить произведение элементов, соответствующих передаточным функциям типовых схем включения операционных усилителей.
Получилось 3 вида схем включения операционного усилителя (рис.3-5).
а) Пропорциональноинтегрирующий усилитель (ПИ-регулятор)

Рисунок 3. Схема ПИ-регулятора
Передаточная функция:

б) Интегро-дифференцирующее звено с коэффициентом передачи, равным единице, и постоянными времени дифференциатора Т1 и интегратора Т2:
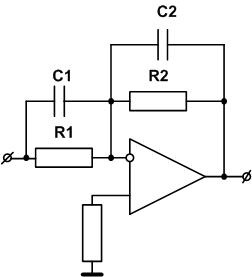
Рисунок 4. Схема интегро-дифференцирующего звена
в) Апериодическое звено с постоянной времени T:
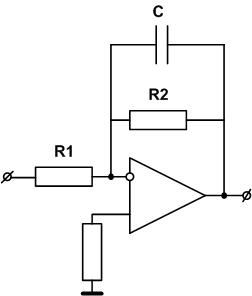
Рисунок 5. Схема апериодического звена.
При формировании схемы фильтра необходимо последовательно включить по инвертирующей схеме одно пропорциональное звено, четыре интегро-дифференциальных (два блока по два одинаковых звена) и в конце схемы два апериодических. Схема включения состоит из 8 звеньев и приведена на рис.6.

Рисунок 6. Схема включения операционных усилителей
Произведем расчет и выбор параметров элементов схемы.
- Звено U1 Пропорционально-интегрирующий усилитель
К= R2 / R1 =  Принимаем R2=100 кОм, R1=
Принимаем R2=100 кОм, R1=  Om
Om
С1 R2 = 0.16
С1 =0.16/  =1.6*
=1.6*  =1.6 мкФ
=1.6 мкФ
К= R2 / R1 = Принимаем R2=100 кОм, R1= Om
- Звенo U2
К= R5 / R4 = 1 Принимаем R5=100 кОм, R4=  Om
Om
С2 R5 = 0.16;
С2 =0.16/ =1.6*  =1.6 мкФ
=1.6 мкФ
Звенья U3 и U4
К= R5 / R4 = 1
Принимаем R5=100 кОм, R4=  Om
Om
С3 R7 = 32* 
С3=32* / = 32*10-9 Ф=32 нФ
С4 R8 = 12* 
С4=12* / =0.12* =0.12 мкФ
К= R10 / R11 = 1
Принимаем R11=100 кОм, R10= Om
С5 R10 = 32*
С5 = 32* / = 32*10-9 Ф=32 нФ
С6 R11 = 12*
С6=12* / =0.12* =0.12 мкФ
1. Звенья U5 и U6 
К= R14 / R13 = 1
Принимаем R14=100 кОм, R13= Om
С7 R7 = 
С7= / =  Ф=
Ф=  нФ
нФ
С8 R14 = 
С8= / =16*  = 16 нФ
= 16 нФ
Принимаем R17=100 кОм, R16= Om
К= R17 / R16 = 1
С9 R16 =
С9 = / = Ф=32 нФ
С10 R17 = ; С10= / =16* = 16 нФ
U7 и U8 Апериодические Звенья
К= R20 / R19 = 1
Принимаем R20=100 кОм, R19= Om
С11 R20 = 
С11= / =  Ф= 1.6 нФ
Ф= 1.6 нФ
К= R23 / R22 = 1
Принимаем R23=100 кОм, R22=  Om
Om
С12 R23 =
С12= / = Ф= нФ
Заключение
В курсовой работе были произведены расчет и построение характеристик реальной ЛАЧХ полосового фильтра, определена и разбита на типовые звенья передаточная функция устройства, разработана схема ее реализации при использовании семи типовых схем операционных усилителей и найдены параметры их элементов.
Список литературы
В.Г.Лукашкин, В.К.Гарипов, В.В.Слепцов, А.В.Вишнеков
Автоматизация измерений,контроля и управления. – М.:
Машиностроение, 2006. – 663 с.
Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. – М.: Наука, 1988. – 679 с.
Бесекерский В.А. Теория систем автоматического регулирования / В. А. Бесекерский, Е. П. Попов.– 4-еизд., перераб. И доп. – М.: СПб Изд-во «Профессия», 2004. – 747 с.
Ким, Д.П. Теория автоматического управления: учеб. пособие для студентов вузов/Д. П. Ким. – М.: Физматлит, 2003 – Т.1: Линейные системы. – 2003. – 287 с.
Теория автоматического управления / Под ред. А.А. Воронова. – М.: Высшая школа, 1986. – 367 с.
Туманов М.П. Теория управления. Теория линейных систем автоматического управления: Учебное пособие. – МГИЭМ. – М., 2005. – 82 с.