по дисциплине ОТЕП
«Синтез схем автоматического управления и защиты электроприводов на релейно-контакторных и бесконтакторных элементах»
Вариант 15
Выполнил:
Ст. гр. АПП 08-2
Моргунов А.С.
Проверил:
Панкратов А. И.
Краматорск 2011
Функциональные узлы и элементы схемы:
АД с фазным ротором, реверсивный магнитный пускатель, 2 пусковые ступени, регулирование скорости, командоконтроллер, пуск функции скорости, торможение противовключением, торможение функцией ЭДС, нулевая защита, динамическое торможение.
1.Составить силовую принципиальную электрическую схему и схему управления электроприводом на релейно-контакторных элементах.


Рисунок 1 − силоваяи схема управления на релейно-контакторных элементах
2.Составить принципиальную силовую схему на бесконтактных коммутаторах
Для этого в релейно-контакторной схеме заменим все контактные элементы набесконтактные.

Рисунок 2 − принципиальнаясиловая схема на бесконтактных коммутаторах
Управляющие сигналы формируются бесконтактнымкомандоаппаратомSA1, функциональная схема которого приведена на рисунке 3.
Привод должен включаться в положение «вперед», если включен коммутатор SV1, и «назад» − если SV2.
Коммутатор SV3 должен включаться, если хотим включить режим динамического торможения и есть разрешающий сигнал от DN4.
Коммутатор SV4 должен включаться, если рукоятку SА1 перевести в первое положениеположение «вперед» или «назад» и есть разрешающий сигнал от DN1.
Коммутатор SV5 должен включаться, если рукоятку SА1 перевести вовторое положение положение «вперед» или «назад» и есть разрешающий сигнал от DN2.
Коммутатор SV6 должен выключаться при переводе рукоятки SА1 в нулевое положение и если есть разрешающий сигнал от DN3; или при переводе из положения «вперед» в положение «назад» и присутствии сигнала от DN3, и наоборот.

Рисунок 3 − Функциональная схема бесконтактногокомандоаппарата
3. Идентификация логических переменных
Входные логические переменные:
 |
1, если UDN1≥ UСР1,
z1 =
0, еслиUDN1 <UСР1,
1, еслиUDN2 ≥ UСР2,
z2 =
0, еслиUDN2 <UСР2,
 1, еслиUDN3 ≥ UСР3, 1, еслиUDN4 ≥ UСР4,
1, еслиUDN3 ≥ UСР3, 1, еслиUDN4 ≥ UСР4,
z3 = z4 =
0, еслиUDN3 <UСР3,0, еслиUDN4 <UСР4,
 1, если SА1включен в положение 0,
1, если SА1включен в положение 0,
x1 =
0, если SА1 не включен в положение 0,
 1, если SА1включен в положение 1 «вперед»,
1, если SА1включен в положение 1 «вперед»,
x2 =
0, если SА1 не включен в положение 1 «вперед»,
 1, если SА1включен в положение 2 «вперед»,
1, если SА1включен в положение 2 «вперед»,
x3 =
0, если SА1 не включен в положение 2 «вперед»,
1, если SА1включен в положение 1 «назад»,
x4 =
0, если SА1 не включен в положение 1 «назад»,
 1, если SА1включен в положение 2 «назад»,
1, если SА1включен в положение 2 «назад»,
x5 =
0, если SА1 не включен в положение 2 «назад»,
1, если SА1включен в положение «торможение»,
x6 =
0, если SА1 не включен в положение «торможение»
Выходные логические переменные:
1, если есть сигнал на включение SV1,
y1 =
0, если нет сигнала на включение SV1,
1, если есть сигнал на включение SV2,
y2 =
0, если нет сигнала на включение SV2,
1, если есть сигнал на включение SV3,
y3 =
0, если нет сигнала на включение SV3,
1, если есть сигнал на включение SV4,
y4 =
0, если нет сигнала на включение SV4,
1, если есть сигнал на включение SV5,
y5 =
0, если нет сигнала на включение SV5.
1, если есть сигнал на включение SV6,
y6 =
0, если нет сигнала на включение SV6.
4. Синтез логических формул
−для управления коммутатором, включающем привод в положение «вперед»:

−для управления коммутатором, включающем привод в положение «назад»:

−для управления коммутатором ускорения первой ступени:

−для управления коммутатором ускорения второй ступени:

−для управления коммутатором ступени противовключения:

−для управления коммутаторомдинамического торможения:

5. Минимизация логических формул






6. Функциональная схема управления электроприводом

Рисунок 4 − Функциональная схема управления электроприводом
7. Принципиальная электрическая схема управления электроприводом
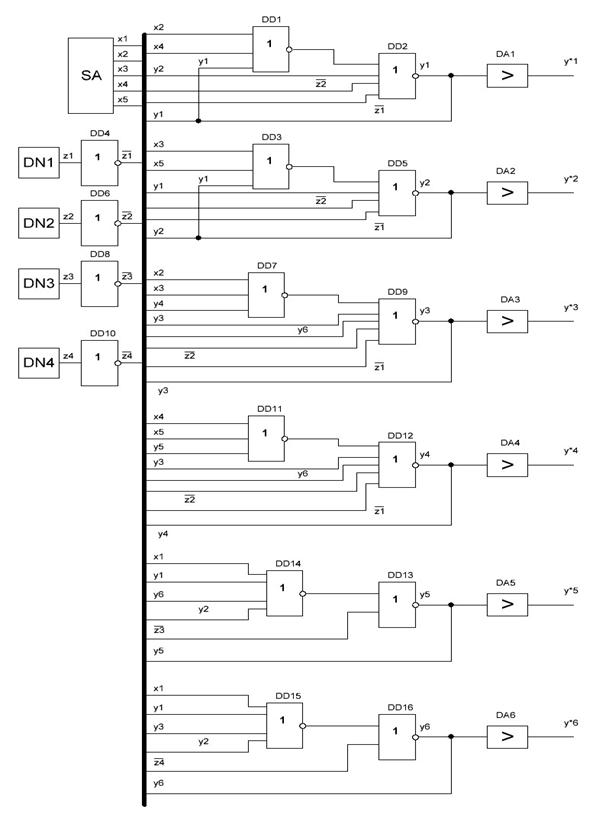
Рисунок 5 − Принципиальная электрическая схема управления электроприводом