Перемещение по осям осуществляется двигателями постоянного тока со встроенными датчиками скорости и положения (ось Z-М1, q-М2, R-М3).
Управление ПР производится от позиционного УЧПУ, причем движение по трем степеням подвижности программируются. Этот ПР может быть оснащен двухместным захватным устройством (грузоподъемность каждого 10 кг) или одноместным захватным устройством (грузоподъемность 10 и 20 кг); может работать со стационарными (неприводными) многопозиционными накопителями; выпускается в трех модификациях, различающихся величиной хода и вылета руки; применяется в условиях крупносерийного и серийного производства.
Механизм подъема и опускания руки промышленного робота М20П.40.01, выполнен в виде отдельного узла. Он обеспечивает перемещение руки по координате Z. Привод вертикального перемещения включает: электродвигатель постоянного тока М3 со встроенным датчиком обратной связи, шариковую передачу винт-гайка качения. Электродвигатель и винт соединены между собой зубчатой муфтой. Для исключения самопроизвольного опускания механизма выдвижения руки при отключении двигателя подъема на верхнем конце винта установлен нормально замкнутый электромагнитный тормоз. Корпус, включающий в себя механизм выдвижения руки, перемещается вверх и вниз по двум направляющим, которые закреплены в верхней и нижней опорных плитах. На верхней опорной плите установлено подмоторное основание, внутри которого находится электромагнитный тормоз. Электродвигатель постоянного тока, установленный на подмоторном основании, через зубчатую муфту соединен с шариковым винтом. Гайка шариковой винтовой пары закреплена в корпусе узла выдвижения руки. Таким образом, вращение электродвигателя преобразуется в поступательное движение руки вверх или вниз. Резиновые амортизаторы позволяют смягчить удар в конце хода руки в верхнем и нижнем положении. Для управления скоростью перемещения в этих положениях используются путевые переключатели, наезжающие на упоры
2. Схват оснащен тремя плоскими губками закрепленными на рычагах под углом 120° относительно друг друга. Привод губок захватного устройства - пневматический. Воздух из заводской пневмосети подается в коробку пневмозолотников и через пневмоклапанбыстрого выхлопа в одну из полостей пневмоцилиндра: правую — при зажиме, а левую - при разжиме детали. Оси поворотных рычагов закреплены в верхней и нижней параллельных плитах, которые связаны между собой планками, образующими жесткий каркас. Крепление схвата к механизму кисти руки осуществляется при помощи кронштейна. Контроль состояния зажима или разжима деталей губками схвата осуществляется двумя датчиками – микровыключателями.
3. Работа блока поворота (исполнение 1) – схвата - При отключенных электромагнитах YA1 и YA2 воздух по магистралям 1, 2 и 3 поступает в обе полости пневмодвигателя М2. При включенном электромагните YAI пневмораспределителя Р4 и отключенном электромагните YA2 происходит поворот кисти руки против часовой стрелки относительно продольной оси. При этом воздух из полости пневмодвигателя М2 вытесняется по магистрали 2 через пневмораспределитель Р4 в атмосферу. При включенном электромагните YA2 пневмораспределителя Р5 и отключенном электромагните YA1 аналогично происходит поворот кисти руки по часовой стрелке.
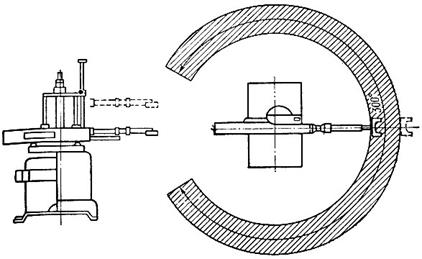
4. В блоке поворота (исполнение 2) привод перемещений по оси a включает: реверсивный пневмодвигатель М, волновой редуктор с передаточным отношением 1:159. Передача вращения от пневмодвигателя к волновому редуктору происходит через плоскозубчатый ремень с передаточным отношением 0,68. Для контроля положения захвата в блоке используются бесконтактные датчики, импульсы от которых поступают в устройство управления. Конечные выключатели для ограничения по оси a от -90 до 180°.
При включенном YA4 в М1 поступает воздух через Р5. Если добавит YA5, то поворот будет ускоренный. Поворот кисти руки относительно ее поперечной оси вправо осуществляется при включенном электромагните YA1. Поворот кисти руки влево осуществляется при включенном электромагните YA2.
5. Механизм схвата манипулятора (исполнение С1). Конструкция захватного устройства этого исполнения применяется для деталей фланцевого типа.
Промышленный робот имеет пять программируемых перемещений:
а. вертикально - z (вверх и вниз) каретки;
б. поворот каретки в горизонтальной плоскости;
в. горизонтальное перемещение штока;
г. угловое положение блока.
6. Перемещение по оси a осуществляется от пневмодвигателя включением электромагнита YА3 (по часовой стрелке) (рис. 10) и YА4 (против часовой стрелки).