В ЭП мех-ов подач приобразование вращательного движения дв-ля в поступательное обеспечивается 2мя типами мех-ов.
- винт – гайка.

- шестерня - рейка.

Рисунок 5.3 Механизмы, обеспечивающие преобразование вращения вала двигателя в поступательное движение
В связи с внедрением сложных операция станков обеспечивающих несколько операций, существенно повысились требования в ЭП мех-ов подачи станков.
Усложнение ЭП мех-ов подачи обусловлено след. пичинами:
- Возрос крутящий момент приведенного вала двиг-ля.
- Расширился диапазон рабочих подач и установочных перемещение.
Раб. подача двиг. в процессе подач устанав. по воздуху, перемеща. инструмента из исходного состояния в зону резания.
Сущ-но изменились конструкции мех-ов передач.
Прекращение использование редуктора, привело в увеличению КПД и уменьшению суммарного момента, но сказалось на увеличение Мст на валу дв-ля и моменте холостого хода.
Поэтому в соврмен. станках применяют специал. высокомоментные дв-ли, а Мхх=(30-40)Мн.
В связи с повышенными требованиями по перегрузочной способности, а так же требуемые диапазоны регулирования скорости, для ЭП мех-ов станков разработанные специальные серии дв-лей, а так же внесены конструктивные изменения в двиг-ли общепромышленных серий.
Для двигателей пост. тока с постоянным возбуждением применяется компенсационная обмотка, обеспечив. компенсацию и как в следствии увеличение диапазона регулирования скорости ослаблением потомка до 4:1 и увеличенной перегрузочной способности дв-ля.
Для дв-лей серии 2П обеспечивается 2х кратная перегрузка в течении 60 сек., 3х – в течении 10 секунд, 5ая – при пуске до номинальной скорости.
Двигатели 2П выполняются с удлиненным якорем, что позволяет снизить момент инерции дв-ля на 40% и снизить диаметр дв-ля и облегчить его встраемость в конструкцию станка.
Двигатели перменног тока серии 4А рассчитаны на работу станков с частотно-регулируемым приводом.
Для дв-лей подачи с высоким быстродействием по отношению к управляющему воздействию создаются спец. дв-ли, обладающие высоким крутящим моментом и малым моментом инерции. К таким дв-лям относит. быстродействующие дв-ли с гладким дисковым печатным якорем, низкоскоростные высокомементные дв-ли с возбуждением от пост. магнитов. Вентильные (бесконтактные) дв-ли, шаговые дв-и.
В дв-лях с гладким якорем отсутствуют пазы на якоре., а обмотка якоря располягается на поверхности якоря. В этом случае диаметр якоря сущ-но снижается, а как в следствии и момент инерции.
В связи с отсутствием пазов для дв-лей характерные электромагнитные постоянные времени снижаются, а это в свою очередь повышает их перегрузочную способность без ухудшения коммутации.
Дв-ли с дисковым якорем, но поверхности которого обмотки якоря крепятся на поверхности, либо на коллектор. Возбуждение – с помощью пост. магнитов. Взаимосвязь с проводниками с помощью отверстий. Такой дв-ль обладает электромех. пост. времени сост. миллисекунды.

Рис. 5.4 Малоинерционный двигатель с дисковым якорем
К таким двигателям серии ДПУ, ПЯ..
- малая мех. инерция двигателя с гладким и с длинным якорем улучшает показатели по отн. к управляющ. воздействию, но плохие показатели по отношению к основному возмущающему воздействию.
- Это обуславливает значительные динамические падения скорости.
- Для данных дв-лей хар-на большая неравномерность вращ. при работе на низких скоростях.
- Могут развивать значит. ускорения от (20-50)тыс. рад/с, а это провоцирует значит. динамические усилия в передачах.
- малая тепловая постоянная нагрева, не терпят перегрузок.
Основным направлением для двигателей пост. тока явл-ся применение высокомоментных дв-лей с возбуждением от пост. магнитов.
«+» регулирование в одной зоне изменением направления якоря, снижаются потери возбуждения, можно увеличить нагрузку на обмотку якоря, все эти двигатели выполняются с более термостойкой изоляцией, применение пост. магнитов сущ-но снижает высоту полюсов (в 2-3 раза) и уменьшает внешний диаметр машины.
Большие значениея магнитной индукции обеспечивают при большом шаге полюсов, обеспечивается более равномерное распределение потока в зазоре, это в свою очередь большую равномерность вращения дв-ля на малых скоростях. Значительный поток возбуждения созд. магнитами, снижает размагничивающее влияние резания, и следовательно дв-ли могут развивать 10-20 кратную перегрузку.
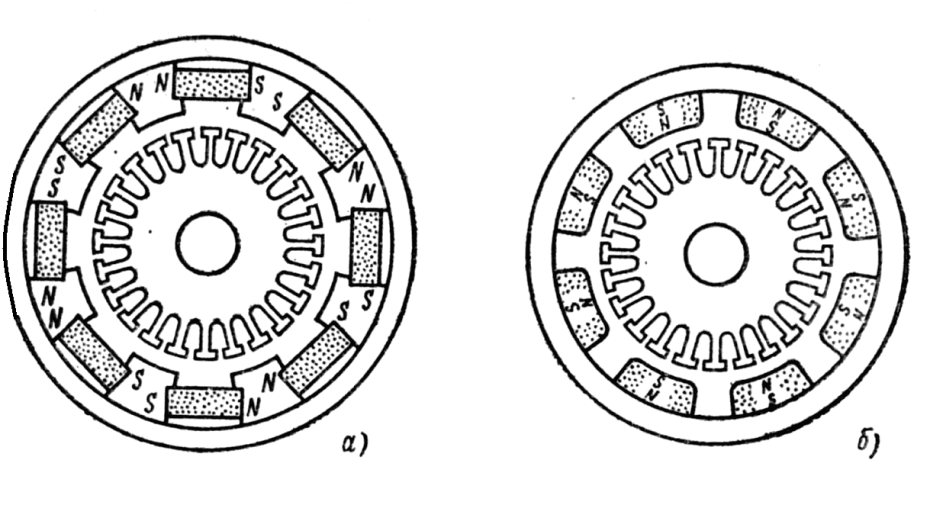
Рис. 5.5 Система возбуждения высокомоментных двигателей с использованием магнитов из сплава альнико (а) и керамических магнитов (б)
В кач-ве материалов для пост. магнитов используют Альник, либо керамические магниты.
В последние годы в станках применяют вентильные дв-ли, представляющие собой синхронные дв-ли с ротором на основе постоянных магнитов, а на обмотке статора с помощью коммутатора подается напряжение, обеспеч. получение вращ. вектора потока статора с частотой соответствующей циклам коммутации.
В наст. время несколько организаций разрабатывают специальные системы частотного регулирования АД для металлорежущих станков.
Диапазон регулирования скорости в мех. подач определяется как отношение максимальной ωуст к минимальной ωподачи при резании. Это отношение в наст. время достигается несколько десятков тысяч, а для точной реализации изготовителя, чем выше диапазон, там лучше.
Таблица 5.2 Допустимые ошибки регулирования скорости вращения двигателей механизмов подачи
Диапазон регулирования скорости в долях от 
| Погрешность в % от установившегося значения скорости | 
| ||

| 
| 
| ||
| 1,0 | 1,5 | 0,1 | 0,1 | 0,05 |
| 0,5 – 1,0 | 0,5 | 0,5 | 0,05 | |
| 0,1- 0,5 | 7,5 | 0,1 | ||
| 0,01- 0,1 | 2,5 | 0,1 | ||
| 0,001- 0,01 | 7,5 | 0,15 | ||
| 0,0001- 0,001 | 0,25 |
В связи с этим, для ЭП мех-ов станков разработаны серии комплектных ЭП которые выполняют эти требования. тип: ТПУ, БТУ, ЭТУ, ШУБ…
В кач-ве примера комплектный ЭП стана типа ЮТУ 3601.

Данный ЭП предназначен для регулирования скорости ЭП главного двигателя и подачи. максимальный диапазон регулирования скорости 10000:1.
Данный привод применен в сочетании с двигателем с возбуждением от пост. магнитов.
Особенности:
- регулирование скорости однозонное.
- питание якоря осущ-ся от реверсивного тиристорного преобразователя с раздельным управлением вентильными группами.
Отлич. особенность – в силовой цепи нет ни одного коммутирующего аппарата и защита элементов силовой цепи осущ-ся бесконтактной (сеточной) защитой.
- реверсивный преобразователь имеет один комплект СИФУ.
- Сигнал обратной ОС по туку якоря получается с помощью 3х трансф-ов тока на входе тирист. преобразователя.
Схема трансформаторного датчика тока якоря
ООС по скорости обеспечивается с помощью ТГ встроенного в дв-ле, поэтому не требует потенциального разделения.
Для улучшения кач-ва ПП в режиме прерыв. токов тир. преобразователя предусмотрены 2 узла.
полож. ОС по ЭДС дв-ля через функцион. преобразователь ФПЕ и нелинейное звено на выходе регулятора тока.
Хар-ка нелинейности ФП ЭДС выполняется обратной нелинейности регулируемой хар-ки ТП Ed=f(Uу).
В этом случае «+» ОС обеспечивает режим хх, т.е. выход регулятора тока оказывается равным нулю. Нелинейное звено на выходе регулятора тока для режима прерыв. тока преобразователя имеет хар-ку обратную зависимости тока якоря от напряжения преобразователя в режиме управления прерыв. токов.
ОС по току якорной цепи обеспеч. 2 транф-ов тока и 2х нулевых 3з фазных схем выпрямления. С помощью ключей В и Н в цепь ОС ругул. тока ко входу рег. тока подключаются сигнал полярности противоположной сигналу задания, т.е. реализ. ООС.
Управление ключами осущ-ся от комплекта преключ. устр-ва раздельного управления вентельными группами.
Наличие одного комплекта СИФУ обесславливает необходимость на входе инвертора ИН кот. в зав-ти от работающей группы либо инвертирует сигнал управления, либо нет.
ЭДС самоиндукции обеспечивается при снижении тока якорной цепи энергии запасенной в индуктивности недостаточно, чтобы обеспечить протекание тока в период всей проводимости (2π)m, поэтому ток проводит в течение угла и появляется бестоковая пауза., что увеличивает средне-выпрямленное напряжение, снижается коэф-т усиления ТП как величина равная Ктп=ΔEd/Δx.

Упрощенная принципиальная схема САР электропривода ЭТУ3601