Лабораторная работа №2
Цель работы: научиться рассчитывать каскадные АСР по известным передаточным функциям объекта.
Постановка задачи: каскадные системы применяют для автоматизации объектов, обладающих большой инерционностью по каналу регулирования, если можно вḂбрать менее инерционную по отношению по отношению к наиболее опасным возмущениям промежуточную координату и использовать для нее то же регулирующее воздействие, что и для основного выхода объекта.
Необходимо: определить настройки основного и вспомогательного регуляторов при заданных динамических характеристиках объекта по основному и вспомогательному каналам.
Теоретические сведения
Каскадная АСР включает в себя два регулятора – основной регулятор, служащий для стабилизации основного выхода объекта y, и вспомогательный регулятор, предназначенный для регулирования вспомогательной координаты y1. Заданием для вспомогательного регулятора служит выходной сигнал основного регулятора (рис. 1).
Рис.1. Структурная схема каскадной АСР.
Расчет каскадной АСР проводится по эквивалентным объектам. Для этого исходную структурную схему (рис.1) преобразовывают таким образом, чтобы один из регуляторов условно относился к эквивалентному объекту.
Как видно из рис. 2а, эквивалентный объект для основного регулятора представляет собой последовательное соединение замкнутого вспомогательного контура и основного канала регулирования.
Передаточная функция его равна:
 . (1)
. (1)
Эквивалентный объект для вспомогательного регулятора является параллельным соединением вспомогательного канала и основной разомкнутой системы. Его передаточная функция равна:
 . (2)
. (2)
а) б)
Рис.2. Структурные схемы эквивалентной одноконтурной системы регулирования
а - с основным регулятором;
б – со вспомогательным регулятором.
Для приближенного расчета настроек основного регулятора принимают допущение о том, что рабочая частота основного контура (ωр) намного меньше, чем вспомогательного (ωр1), и при ω = ωр
 .
.
Тогда
 . (3)
. (3)
Таким образом, в случае приближенных расчетов, настройки основного регулятора не зависят от вспомогательного и находятся по передаточным функциям объекта.
Для приближенного расчета вспомогательного регулятора предполагают, что внешний регулятор отключен, т.е.
 . (4)
. (4)
Таким образом, приближенные настройки вспомогательного регулятора находят по одноконтурной АСР для вспомогательного канала регулирования.
Последовательность выполнения работы
Лабораторная работа выполняется в следующей последовательности:
1. Рассчитать приближенные настройки основного ПИ-регулятора, используя передаточную функцию эквивалентного объекта (3).
2. Рассчитать приближенные настройки вспомогательного П-регулятора, используя передаточную функцию эквивалентного объекта (4).
3. Уточнить настройки основного и вспомогательного регуляторов, используя передаточные функции эквивалентных объектов (1) и (2).
4. Построить графики переходных процессов вспомогательной координаты (основной регулятор отключен), основной координаты в одноконтурной АСР и в каскадной АСР.
Методический пример
1. Передаточные функции объекта по основному и вспомогательному каналам равны:
 .
.
Для расчета одноконтурных АСР используем метод Циглера-Никольса.
Сначала определим приближенные настройки основного регулятора. Следуя выражению (3), находим передаточную функцию эквивалентного объекта:
и его частотные характеристики:
 ;
;
 ;
;
 .
.
Критическую настройку регулятора и критическую частоту находим из системы уравнений:
 .
.
Рабочие настройки ПИ-регулятора принимаем равными:
С1 = 2.23; С0=0,31.
2. Аналогично проводим расчет приближенных настроек вспомогательного регулятора.
3. Уточнение настроек регуляторов проводим с помощью MatLab. Для этого создаем LTI-объект с передаточной функцией (1), в которую подставляем Wp1(p). Частотные характеристики эквивалентного объекта находим графическим способом. Для этого с помощью команды nyquist строим годограф АФХ и определяем критическую частоту и соответствующее ей значение АЧХ (рис. 3).
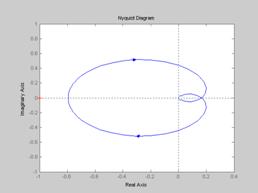
Рис. 3. Годограф АФХ для эквивалентного объекта.
Критическая частота соответствует точке пересечения годографа с отрицательной действительной полуосью. После чего уточняем настроечные параметры ПИ-регулятора.
4. Аналогично уточняем настройку вспомогательного П-регулятора.
5. Переходные процессы строим также с помощью MatLab, используя команду step.
6. 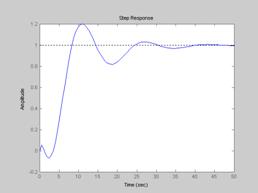 а)
а) 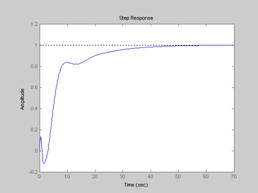 б)
б)
 в)
в)
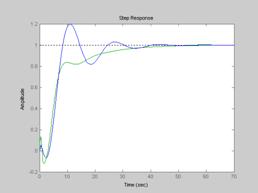
Рис. 4. Графики переходных процессов
а – в одноконтурной АСР;
б – в каскадной АСР;
в – сравнительная переходная характеристика одноконтурной и каскадной АСР.
Контрольные вопросы
1. Сформулируйте принцип работы каскадной АСР.
2. Приведите пример каскадной АСР для типового объекта химической технологии.
3. Как проводится расчет каскадных АСР?
4. Приведите пример структурной схемы эквивалентного объекта.
5. Какие формулы эквивалентных объектов используются для приближенных расчетов настроек регуляторов?
6. Сделайте вывод о целесообразности использования каскадных АСР.
Варианты заданий
1. 
| 7. 
|
2. 
| 8. 
|
3. 
| 9. 
|
4. 
| 10. 
|
5. 
| 11. 
|
6. 
| 12. 
|