Погрешности системы замкнутого типа.
Задача состоит в том, чтобы выставить измерительные оси акселерометров в плоскость горизонта.
В ИНС замкнутого типа, по сравнению с разомкнутой схемой дополнительно осуществляется управление угловым положением платформы через ДМ гироскопов. В силу того, что к гироскопу могут быть приложены возмущающие моменты, обусловленные трением в опорах, тяжением токоподводов, статической несбалансированностью и т.д. может возникать неконтролируемая прецессия нашей платформы или её дрейф.
Абсолютная скорость разворота платформы:
 , где
, где  - угловая скорость под действием управления + ещё войдет погрешность акселерометра,
- угловая скорость под действием управления + ещё войдет погрешность акселерометра,  - неконтролируемый дрейф платформы
- неконтролируемый дрейф платформы
Ось гироскопа Н отклонена от ИВ на малый угол 
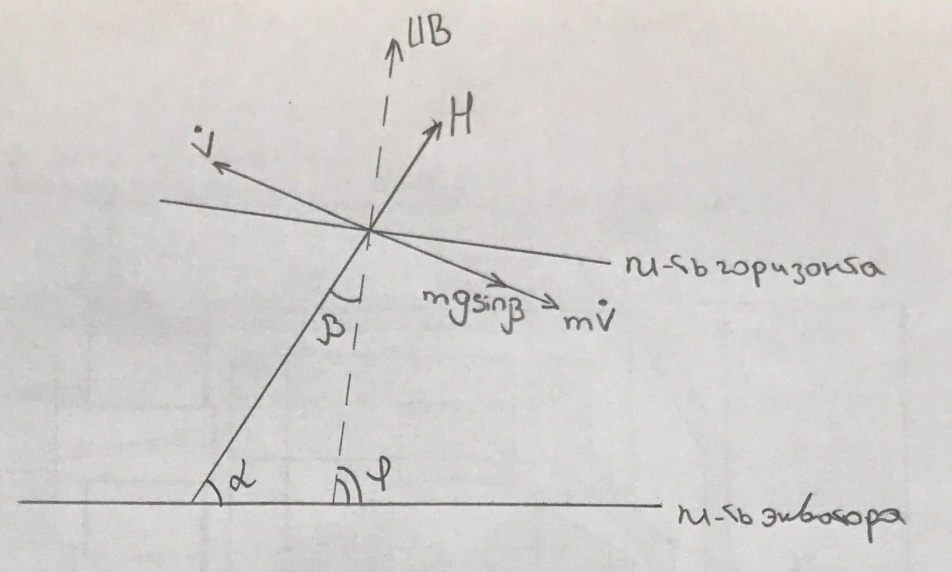
 ,
,
где  - угол между направлением оси собственного вращения гироскопа и плоскостью экватора,
- угол между направлением оси собственного вращения гироскопа и плоскостью экватора,  - абсолютная угловая скорость платформы
- абсолютная угловая скорость платформы
Отсюда следует, что  , где
, где  - угловая скорость поворота вертикали относительно центра Земли, а также
- угловая скорость поворота вертикали относительно центра Земли, а также
 - формируется по текущим показаниям акселерометра;
- формируется по текущим показаниям акселерометра;
 - скорость управления, которая формируется по реальным показаниям акселерометра;
- скорость управления, которая формируется по реальным показаниям акселерометра;
 - погрешность по скорости
- погрешность по скорости
- неконтролируемый дрейф
Итого 
Далее вспомним, что управляющий сигнал, подаваемый на ДМ гироскопа, формируется при помощи показаний акселерометра  ,
,
где  - измеряемое ускорение,
- измеряемое ускорение,  - истинное значение,
- истинное значение,  - погрешность акселерометра,
- погрешность акселерометра,  - погрешность, связанная с отклонением платформы от вертикали
- погрешность, связанная с отклонением платформы от вертикали
Получившееся выражение подставляем в  , получаем:
, получаем:
 , где
, где 
После преобразований получаем уравнение вида:

Интегро-дифференцирующее уравнение, описывающее поведение погрешностей одноканальной ИНС замкнутого типа.
Нам необходимо знать поведение выходных погрешностей ИНС под действием входных погрешностей.
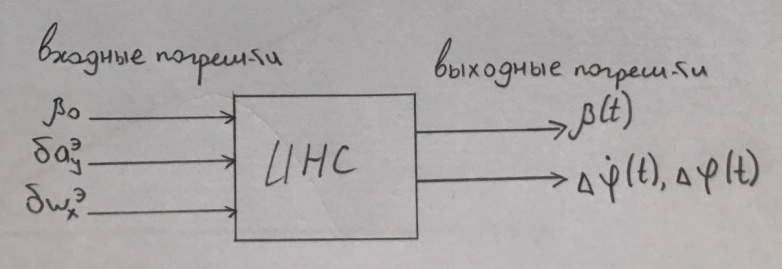 ,
,
Где  - погрешность горизонтирования (угла ориентации),
- погрешность горизонтирования (угла ориентации),  - погрешности по скорости и координате северного канала.
- погрешности по скорости и координате северного канала.
Заметим, что двухканальная система ИНС есть пространственная ИНС, т.к. показания вертикального канала не используются в ИНС.
Полученное интегро-дифференцирующее уравнение описывает поведение оси ротора гироскопа в пространстве в зависимости от входных погрешностей.
Рассмотрим решение данного уравнения в виде частного случая, когда имеется дрейф гироблоков.
 , есть дрейф гироскопа, остальными погрешностями пренебрегаем
, есть дрейф гироскопа, остальными погрешностями пренебрегаем
Тогда интегро-дифференцирующее уравнение примет вид:
Уравнение будем решать с помощью изображений. Данный метод позволяет перейти от решения ДУ к решению алгебраического уравнения.
В области изображений уравнение примет вид:

Решаем уравнение:
При переходе обратно во временную область имеем:
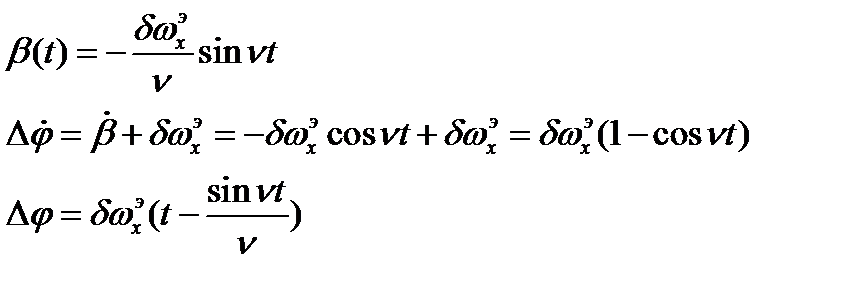

Вывод: ошибки по углу и угловой скорости такие же, как и в случаях с неточностью выставки в горизонт и смещением нуля акселерометра, а именно не нарастают с течением времени, а лишь совершают незатухающие колебания с частотой Шулера. Ошибка по координате местоположения нарастает с течением времени. Погрешность горизонтирования и погрешность по скорости не имеют большого значения, поскольку они имеют ограничивающий фактор.