ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К курсовому проекту
На тему: «Проектирование и исследование механизма инерционного конвейера »
Содержание
ВВЕДЕНИЕ
. ИСХОДНЫЕ ДАННЫЕ К КУРСОВОМУ ПРОЕКТУ
. СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА
. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
Синтез (проектирование) рычажного механизма
Определение скоростей и ускорений всех точек и звеньев механизма методом планов (построение плана скоростей и плана ускорений)
Определение перемещений, скоростей и ускорений ведомого звена методом построения кинематических диаграмм
. СИЛОВОЕ ИССЛЕДОВАНИЕ МЕХАНИЗМА
Определение сил, действующих на звенья механизма
Определение реакций в кинематических парах
Силовой расчет структурной группы 4-5
Силовой расчет структурной группы 2-3
Силовой расчет ведущего звена
Определение уравновешивающей силы методом Н.Е. Жуковского
Заключение
ЛИТЕРАТУРА
ВВЕДЕНИЕ
Инерционный конвейер предназначен для перемещения сыпучих материалов в горизонтальном направлении на расстояние от 50-100 м. движение от электродвигателя 10 передается кривошипу 1 через планетарный редуктор 11 и зубчатую передачу z4-z5. Рычажный механизм, состоящий из кривошипа 1, шатуна 2, коромысла 3, кулисного камня 4 и ползуна 5, обеспечивает возвратно-поступательное движение транспортирующего желоба 6. Желоб при движении вправо увлекает насыпанный на него материал. Когда отрицательное ускорение желоба достигает критического значения, начинается относительное скольжение материала по желобу за счет накопленной ранее кинетической энергии. Далее материал движется со скоростью, убывающий по линейному закону до момента выравнивая скоростей материала и желоба при движении последнего влево. Материал должен перемещаться по желобу все время в одну сторону (вправо). Для этого положительное ускорение не должно превышать критического значения. Подача материала на желоб из бункера осуществляется кулачковым механизмом 7-8. Кулачок 7 получает вращение от кривошипного вала через цепную передачу 9 с передаточным отношением U=1. Для получения требуемой равномерности движения на кривошипном валу закреплен маховик 12.
кинематический инерционный конвейер рычажный
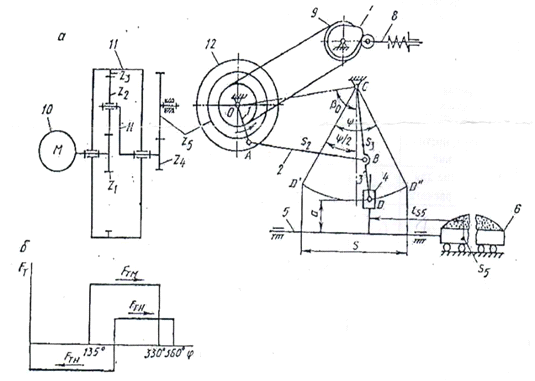
Рис. Механизм инерционного конвейера: а - схема планетарного механизма; б - схема механизма кулачкового; в - схема рычажного механизма инерционного конвейера; г - графики сил трения, приложенных к жёлобу (FТ.П.. - в направляющих желоба; FТ.М. - материала по желобу)
ИСХОДНЫЕ ДАННЫЕ К КУРСОВОМУ ПРОЕКТУ
| Параметр | Обозначения | Числовые значения параметров | |
| Параметр | Единицы СИ | ||
| Ход желоба | ℓS | м | 0,28 |
| Коэффициент изменения средней скорости желоба | Кv | - | 1,18 |
| Частота вращения кривошипа | n1 | об/мин | |
| Угол размаха коромысла | ψ | град | |
| Угол, определяющий положение межосевой линии | β0 | град | |
| Номера положений для построения планов ускорений | - | - | 3,5,8 |
| Положение для силового расчета | - | - | |
| Сила трения в направляющих желоба | FT.H. | кH | 1,3 |
| Коэффициент неравномерности движения | δ | - | 0,12 |
| Сила трения материала по желобу | FT.M. | кН | 3,9 |
| Ход толкателя | lhmax | м | 0,045 |
| Фаза удаления = фазе приближения | φу=φп | град | |
| Фаза дальнего стояния | φд.с. | град | |
| Закон движения толкателя | - | - | косинусоидальный |
| Число зубьев колес | Z4 Z5 | - | 12 18 |
| Модуль зубчатой передачи | m | мм | 3,5 |
| Перед. отношен. планет. редуктора | U1H | - | 4,5 |
| Тип зацепления | - | - | равносмещенное |
Указания. За начало отсчета принять положение, при котором ползун 5 находится в крайнем левом положении. Кинематические диаграммы построить для штанги 5.
Для всех вариантов принять: 1) ℓСВ=0,6ℓСD; ℓа= 0,25ℓS; ℓS = 3м; 2) центры масс звеньев ℓАS2 = 0,5ℓАВ; ℓСS3 = 0,5ℓСD; 3) осевые моменты инерции звеньев JS = 0.1mℓ2 (кгм2); 4) массы звеньев m2=qℓAB; m3 = qℓCD; где q=60; m5=100 кг; кривошип уравновешен; 5) допустимый угол давления ϑдоп=30о.
2.
СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА
Название звеньев:
-кривошип; 2-шатун;
-коромысло; 4-кулисный камень;
-ползун; 6-опоры.
Определяем степень подвижности механизма:= 5 - количество подвижных звеньев,
р5 = 7 - количество низших кинематических пар,
Р4= 0 - количество высших кинематических пар. Тогда
= Зn - 2р5 - р4 =3·5 -2·7-0 = 1.
Структурная группа 4-5
ΙΙ  5 вид
5 вид
=3·2-2·3=0
Структурная группа 2-3
ΙΙ  1 вид
1 вид
=3·2-2·3=0
Механизм I класса
Ι 
W=3·1-2·1=1Ι  → ΙΙ
→ ΙΙ  → ΙΙ
→ ΙΙ 
Вывод: данный механизм ΙΙ класса
Все данные сводим в таблицы 2.1 и 2.2
Таблица 2.1 - Название звеньев
| № звена | Наименование звена | Подвижность звена | Число подвижных звеньев |
| Кривошип | Подвижное | n = 5 | |
| Шатун | Подвижное | ||
| Коромысло | Подвижное | ||
| Кулисный камень | Подвижное | ||
| Ползун | Подвижное | ||
| Опора | Неподвижное |
Таблица 2.2 - Наименование кинематических пар
| Обозн. | Соединяемые элементы | Тип пары | Индекс пары | Число пар | |||
| вид движения | Хар-р соед. | подвижность | Одно подвижные | Двух подвижные | |||
| О | 1,6 | вращ. | низшая | одноподв. | В0(1,6) | Р5=7 | Р4=0 |
| А | 1,2 | вращ. | низшая | одноподв. | ВА(1,2) | ||
| В | 2,3 | вращ. | низшая | одноподв. | ВВ(2,3) | ||
| С | 3,6 | вращ. | низшая | одноподдв. | ВС(3,6) | ||
| D | 3,4 | вращ. | низшая | одноподв. | ВD(3,4) | ||
| D | 4,5 | пост. | низшая | одноподв. | ПD(4,5) | ||
| Е | 5,6 | пост. | низшая | одноподв. | ПЕ(5,6) |