Автор: Забродов Михаил Михайлович.
Педагог: Шелепов Максим Игоревич
Секция “Электроника и робототехника”
Колпинский Дворец творчества детей и молодежи
Содержание:
-Введение 3
-Технические характеристики системы 3
-Описание устройств 3
-Инструкция по управлению 6
-Проблемы реализации проекта 6
-Перспективы развития проекта 6
-Монтажная схема устройств 6
-Список компонентов 8
-Об авторе проекта 8
-Программная часть 8
Введение
В связи с тем, что в современном мире могут возникать ситуации, когда необходимо измерить данные окружающей среды, в небезопасных для человека условиях (например, во время какой-либо аварии, с химическим, радиационным, биологическим заражением), темой данного проекта стало создание подобного устройства.
Задача: обеспечить безопасность измерения данных об окружающей среде там, где этого не может сделать человек, в опасных местах.
Решить эту задачу можно с помощью дистанционной автономной платформы, которая будет снимать показания об окружающей среде (пример: температура, влажность воздуха, давление, радиационный фон, визуальный контроль), без участия человека, но под его управлением.
Цель работы: создать платформу с дистанционным управлением, способную снимать показания с датчиков и отображать их пользователю.
Технические характеристики системы
Система имеет следующие характеристики:
-дальность связи не менее 200 метров
-измерение и вывод показаний с датчиков:
1) температура воздуха в *С
2) влажность воздуха в %
3) освещенность в %
4) скорость передачи данных в мс
(возможно добавление других датчиков)
-емкость аккумулятора ~2000маЧ, время автономной работы ~5 часов.
-частота радиосвязи – 433 МГц
-вывод данных с датчиков на дисплей, 128/64 пикселя
-настраиваемая частота обновления данных
-система видеопередачи на частоте 5.8 ГГц, 720p
Описание устройств
Система дистанционного управления реализована в виде взаимодействия 2 микроконтроллеров Arduino (Uno и Nano). Контроллеры взаимодействуют с помощью радиосвязи, на модулях HC-12. Система видеопредачи работает независимо от платформы, состоит из камеры, передатчика и видеоприемника. В качестве монитора используется смартфон, ПК, или любой монитор с аналоговым входом.
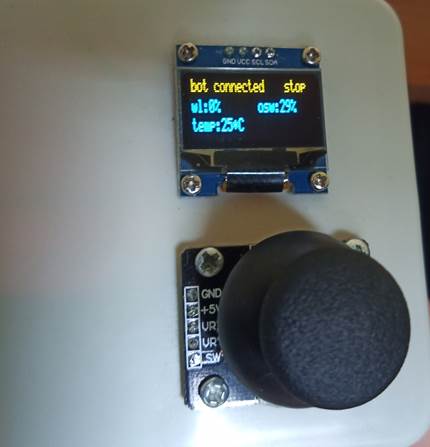
Описание пульта управления: состоит из контроллера, дисплея, модуля связи, джойстика и АКБ. Все компоненты расположены в пластиковом корпусе. Контроллер обрабатывает углы наклона джойстика и отправляет на платформу сигналы управления, принимает сигналы с датчиков и выводит их на OLED дисплей.
Внешний вид пульта:
Внутреннее устройство пульта: 
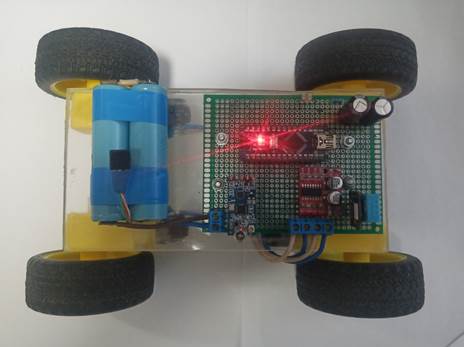
Описание платформы: Основой является 2х 4мм оргстекло, которое устойчиво к внешним воздействиям и имеет низкую стоимость. Платформа состоит из контроллера, модуля связи, внешних датчиков, драйвера двигателей и самих двигателей. Вся электроника смонтирована на отдельной плате, которая закреплена винтами, двигатели и АКБ подключаются через клеммы, для более простого обслуживания техники. Платформа принимает по радиоканалу сигналы управления, и в ответ отправляет данные с датчиков.
Внешний вид платформы:
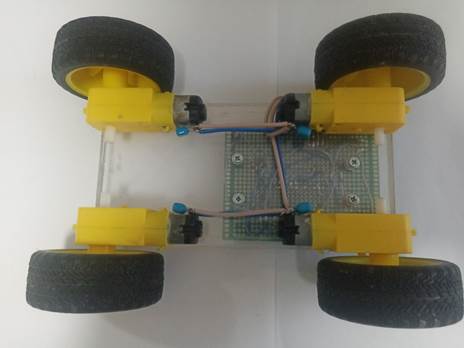
Вид снизу:
Инструкция по управлению
Для управления системой нужно включить питание на пульте и платформе, дождаться подтверждения соединения. С помощью джойстика можно задавать направление движения платформы, по “танковой” схеме (повороты осуществляются за счет изменения направления вращения колесной пары на одной стороне). На дисплее пульта отображаются данные с датчиков полученные от измерительной платформы. На пульте отображается скорость соединения в миллисекундах. Реализована система автоматического повторного подключения при потере связи.
Для получения видео, нужно подключить питание видеопередатчика, приемник подключатся к телефону по USB (телефон должен поддерживать OTG), открыть программу для отображения видео, например - FPViewer (бесплатно).