Отдельные составляющие сложных систем, которые предстоит изучать и разрабатывать, принято называть объектами. Таковыми являются детали, приводы, станки и др.
Множество объектов образуют систему объектов, но в составе сложных систем они могут играть различную роль. Основная задача – это выбор объектов и организация их взаимодействия, при которых составленная из них система выполняет вполне определенные функции.
Свойства рассматриваются в статическом и динамическом состояниях, причем динамические свойства системы могут быть изучены только в процессе функционирования системы.
Систему, не имеющую внешней среды, называют изолированной. В реальном мире таких систем не существует. Систему, у которой есть внешняя среда, называют открытой. Если некоторый объект определен как открытая система, то возникает вопрос: какие элементы включать в систему и какие отнести к внешней среде? Универсальных правил для решения этого вопроса не существует. Хотя конкретные системы по своему характеру объективны, на них в то же время наложен субъективный отпечаток, поскольку образующая их конфигурация элементов обусловлена требованиями задач, формулировку и решение которых осуществляет исследователь.
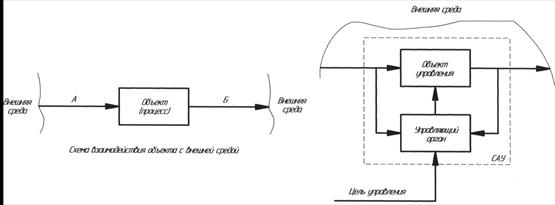
Очевидно, что внешняя среда воздействует на объект, а объект, в свою очередь, влияет на окружающую среду. Эти воздействия могут быть самыми различными: физическими (гравитационными, температурными, механическими,…) и информационными (сигнальными). Это отражено на
|
| |||||||||||||||||
|
| ||||||||||||||||
|
| ||||||||||||||||
| |||||||||||||||||
| |||||||||||||||||
| |||||||||||||||||
| |||||||||||||||||
|
Рис. 7. Схема системы управления
Обобщенная структурная схема САУ представлена на рис. 8: ЗУ – зада-ющее устройство; СУ – суммирующее устройство; У – усилитель; ИМ – исполнительный механизм; ОУ – объект управления; ИУ – измерительное устройство.
Составную часть системы, у которой есть вполне определенное соотношение между входными и выходными параметрами, называют звеном (рис. 9).
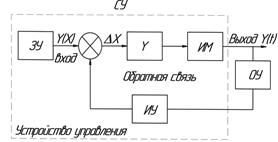
Рис. 8. Обобщенная структурная схема САУ |  Рис. 9. Условное изображение звена
Рис. 9. Условное изображение звена
|
Принципы управления
Перечислим основные принципы управления.
1. Управление по заданному воздействию
На вход подается постоянный сигнал и никаких других мер не принимается. Недостаток принципа в том, что в случае отклонения качество управления снижается. По структуре эти САУ разомкнутые, так как не имеют обратной связи по управляемому параметру y(t) и не образуют замкнутого контура управления.
2. Управление по возмущению
Данный принцип управления основан на принципе компенсации возмущения (разомкнутое управление) и является исторически первым принципом автоматического управления. Управляемый параметр не изменяется, а используется информация о внешнем воздействии f(t). При этом сначала выясняют, какое возмущающее воздействие было основным, а затем устанавливают, как необходимо менять значение управляемого параметра при изменении данного возмущающего воздействия, для того чтобы значение его поддерживать постоянным. Недостаток: в случае преобладания неконтролируемых возмущений z(t) этот способ не дает требуемой точности. Достоинство: имеется возможность полной компенсации возмущения.
3. Управление по отклонению
Более высокое качество управления позволяют получить замкнутые САУ, в которых используется информация об управляемой величине y(t) и задающем воздействии g(t). Сначала измеряется y(t), затем это значение сравнивается с заданным и при наличии разности (сигнала рассогласования) вырабатывается управляющее воздействие G(t), направленное в сторону уменьшения сигнала рассогласования. При этом устройство управления стремится компенсировать отклонение независимо от причин, вызвавших его. Такое управление можно назвать гибким. Недостатки: затруднено управление, возникающее при разработке быстродействующих систем управления, особенно для сложных инерционных систем. Стремление повысить точность работы такой системы и увеличить коэффициент усиления приводит к потере устойчивости. Решение - в комбинированном управлении.
4. Комбинированное управление
САУ, в которых используется информация одновременно о трех воздействиях – g(t), y(t), f(t), называют комбинированными. Они имеют более высокое качество управления, чем системы, работающие только по отклонению, так как информация о значении возмущающего воздействия f(t) позволяет устройству работать с предвидением, т.е. начинать компенсацию внешнего возмущения, нарушающего нормальную работу объекта управления, раньше, чем возникнет достаточно большое отклонение. Одновременно это дает возможность повысить точность и быстродействие системы. Графически принципы управления представлены на рис. 10.

Рис. 10. Принципы управления