Компаратор – это сравнивающее устройство, схема которого имеет два входа и один выход. Принцип его работы заключается в том, что если опорный сигнал превышает пороговый, то на выходе вырабатывается сигнал высокого уровня, если же на оборот низкого уровня.

Рис. Общепринятое обозначение компаратора
1- не инверсный 2- инверсный
При помощи компаратора мы можем определить  , ведь
, ведь  это сдвиг фаз между током и напряжением. Значит, подавая на инверсный вход аналоговый сигнал тока, а на не инверсный аналоговый сигнал напряжения, на выходе получим сигнал низкого уровня, который будет равен значению .
это сдвиг фаз между током и напряжением. Значит, подавая на инверсный вход аналоговый сигнал тока, а на не инверсный аналоговый сигнал напряжения, на выходе получим сигнал низкого уровня, который будет равен значению .
 Рис. Диаграмма аналоговых и цифровых сигналов напряжения и тока а так же сигнала формирующегося на выходе компаратора
Рис. Диаграмма аналоговых и цифровых сигналов напряжения и тока а так же сигнала формирующегося на выходе компаратора
Область отставания ограничена пунктирной линией, и величина этой области соответствует значению
 Рис. Аналоговая реализация параметра через схему компаратора
Рис. Аналоговая реализация параметра через схему компаратора
Рис. График значения
Датчик Холла
Известно, что эффект Холла – это физическое явление, смысл которого заключается в возникновении электродвижущей силы, с помощью проводника с током на который действует перпендикулярно направленное магнитное поле напряженностью H. Получаемая ЭДС пропорциональна и току, и напряженности, и называется ЭДС Холла, определяется выражением  ; где
; где  – коэффициент, зависящий от материала и толщины пластины d,
– коэффициент, зависящий от материала и толщины пластины d,  - постоянная Холла.
- постоянная Холла.
 Рис. Обозначение датчика Холла в схемах электрических цепей
Рис. Обозначение датчика Холла в схемах электрических цепей
Эффект холла связан с эффектом магнитосопротивления, а это значит, что в сильных поперечных магнитных полях проводники могут иметь увеличенное сопротивление.
 , данная величина связанна с напряженностью магнитного поля H квадратичной зависимостью где
, данная величина связанна с напряженностью магнитного поля H квадратичной зависимостью где  - коэффициент, зависящий от материала и размеров проводника
- коэффициент, зависящий от материала и размеров проводника
При помощи датчиков Холла можно измерить различные электрические и магнитные величины. Элементы Холла применяются в датчиках тока, и к ним предъявляются определенные требования: - не должны вносить искажения в измеряемую цепь - должны обеспечивать заданную точность - должны осуществлять преобразования измеряемого сигнала в электрический сигнал
В их основе подобных датчиков, лежит измерение индукции магнитного поля. Ферро магнитное кольцо используется в качестве регистратора магнитного поля, на него намотана вторичная обмотка, содержащая несколько тысяч витков, а первичная проходит сквозь, и состоит из одного витка, по которому проходит ток силовой цепи.
Сам датчик Холла установлен в поперечный разрез кольца, и измеряет поток в воздушном зазоре.
Работа датчика основана на принципе компенсации магнитного поля. Когда по первичной обмотке протекает ток, возникает магнитный поток, который намагничивает сердечник. На это реагирует датчик Холла, и на его выходе появляется сигнал. Он усиливается и подается на вторичную обмотку, так создаваемый ею поток уже направлен на размагничивание сердечника. Значение тока при этом устанавливается так, что бы суммарный поток в сердечнике был равен нулю. С измерительного сопротивление снимается выходное напряжение, а форма тока совпадает с формой тока силовой цепи.
Подробно работу датчика можно пояснить с помощью следующих осциллограмм.
 Рис. Внутренний сигнал датчика при условии
Рис. Внутренний сигнал датчика при условии  .
.
Любой выходной сигнал датчика Холла усиливается микросхемой А до максимума. Во вторичной цепи создается поток, который регистрируется датчиком Холла. Он выдает отрицательный сигнал на вход усилителя, в ходе чего напряжение микросхемы меняет свой знак. Таким образом, выходной сигнал микросхемы колеблется от минимума до максимума.
 Рис. Выходной сигнал датчика при условии
Рис. Выходной сигнал датчика при условии 
При помощи быстродействия микросхемы можно определить частоту колебаний, она примерно равна 100 кГц. Сигнал с выхода операционного усилителя меняет форму и сильно ослабляется на нагрузочном резисторе  , из-за большой частоты колебаний и индуктивности катушки вторичной цепи. В данном процессе происходит релейное регулирование тока, точность которого зависит от частоты переключений микросхемы и числа витков во вторичной обмотке.
, из-за большой частоты колебаний и индуктивности катушки вторичной цепи. В данном процессе происходит релейное регулирование тока, точность которого зависит от частоты переключений микросхемы и числа витков во вторичной обмотке.
Ширина импульсов в положительной части осциллограммы увеличивается, если есть положительный знак в первичной цепи постоянной составляющей тока, а уровень сигнала на нагрузочном резисторе повышается, что показано на рисунках.

Рис. Внутренний сигнал датчика Рис. Выходной сигнал датчика
при условии что 
Трансформатор – это устройство, которое предназначено преобразовывать параметры электрического тока, такие как напряжение и ток. К примеру, трансформатор напряжения, преобразовывает напряжение, плавно повышая или понижая его в зависимости от соотношения числа витков вторичной обмотки к первичной. В свою очередь трансформатор тока используется для его измерения, и применяется в цепях переменного тока в качестве датчика. Этот датчик может применяться в схемах с тиристорным преобразователем.
Ток выпрямленный равен произведению 1.22 на значение тока фазы

В таких случаях всегда пишут чему равна передаточная функция данного трансформатора. 
Где 
 Рис. Временная зависимость выходного напряжения и напряжения датчика тока
Рис. Временная зависимость выходного напряжения и напряжения датчика тока

Рис. Логарифмическая амплитудно-частотная характеристика датчика тока.
Система ПЧ-АД.
На данный момент частотный способ регулирования скорости асинхронного двигателя является самым экономичным, следовательно он наиболее многих подходит нам.
 , где
, где 

данное выражение позволяет увидеть возможность регулирования скорости асинхронного двигателя путем изменения частоты напряжения обмотки статора.
Так меняя частоту напряжения обмотки статора, мы получаем разные скорости идеального холостого хода, при этом зависимость угловой частоты ( принимает линейный вид.
принимает линейный вид.
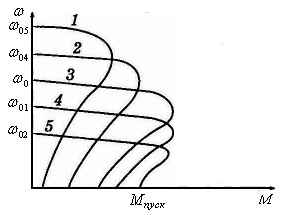 Рис. Механические характеристики асинхронного двигателя при частотном способе регулирования.
Рис. Механические характеристики асинхронного двигателя при частотном способе регулирования.
Механические характеристики АД при данном способе регулирования существенно отличаются от естественных. Так если мы подводим к обмотке статора, напряжение с неменяющейся амплитудой, то критический и пусковой моменты двигателя увеличиваются при уменьшении частоты питающего напряжения  , но в этом случае не удается избежать резкого увеличения тока намагничивания и тока статора, из чего следует, что магнитная система насыщается. В результате увеличиваются потери как электрические, так и магнитные. Вот почему нужно регулировать амплитуду напряжения
, но в этом случае не удается избежать резкого увеличения тока намагничивания и тока статора, из чего следует, что магнитная система насыщается. В результате увеличиваются потери как электрические, так и магнитные. Вот почему нужно регулировать амплитуду напряжения  как функцию от частоты и момента нагрузки М, что бы повысить технико-экономические показатели.
как функцию от частоты и момента нагрузки М, что бы повысить технико-экономические показатели.
Следует отметить отдельно, что в разомкнутых системах управления напряжения  обычно регулируется в функции от частоты
обычно регулируется в функции от частоты 

То есть, для осуществления частотного способа регулирования скорости асинхронного двигателя необходимо иметь преобразователь частоты.
Выбор Частотного преобразователя
Преобразователь частоты — это устройство, состоящее из выпрямителя (моста постоянного тока), преобразующего переменный ток промышленной частоты в постоянный, и инвертора (преобразователя) (чаще с ШИМ), преобразующего постоянный ток в переменный требуемых частоты, амплитуды и формы. Выходные транзисторы IGBT или MOSFET обеспечивают необходимый ток для питания электродвигателя.
Исходя из условий и технических параметров электродвигателя, мы используем частотный преобразователь фирмы Siemens, серии SINAMICS G120 - это преобразователь модульного типа, обладающий широким функционалом.
Конструкция устройства включает несколько компонентов (модулей). Основные - это CU (блок управления) и РМ (силовой блок).
CU обеспечивает контроль над силовым компонентом, который, в свою очередь, связан с электродвигателем; кроме того, система CU дает возможность использовать разнообразные интерфейсы связи для осуществления контроля и мониторинга состояния электропривода.
В зависимости от требуемых параметров мощности и функциональности модульные компоненты могут свободно комбинироваться; диапазон мощностей достаточно велик - от 0,37 кВт до 250 кВт, что соответствует мощности выбранного двигателя.
Частотные преобразователи SINAMICS G120 обладают рядом индивидуальных конструктивных и эксплуатационных особенностей:
- Интегрированная система безопасности с набором инновационных функций
- Система возврата избытков электроэнергии в сеть питания
- Новый принцип охлаждения
- Возможность применения программных средств SIZER и STARTER для быстрой наладки и инжиниринга
- Использование карты памяти ММС и панели оператора BOP для резервного копирования данных
Конструкция SINAMICS G120 представляет собой удобную модульно-приводную систему, которая состоит из двух функциональных блоков.

1) Управляющий модуль CU240E-2 контролирует силовой модуль и подключенный двигатель в нескольких типах регулирования по выбору.
Он поддерживает связь с локальной или центральной системой управления, а также с устройствами контроля.

Серия модулей CU240 предназначена для выполнения приложений ПЧ работающих с ленточными транспортерами и экструдерами. Управляющие модули CU240E-2 имеют стандартную конфигурацию входов-выходов, а также встроенную технику безопасности и дополнительно интерфейс PROFIBUS.
7.1.1) Коммуникационный интерфейс PROFIBUS DP

Технические данные
| Электрические | |
 (рабочее напряжение) (рабочее напряжение)
| 24В(DC) через силовой модуль 18…30В (DC) через внешний источник питания |
 (потребляемый ток) (потребляемый ток)
| 0.5А |
 (мощность потерь) (мощность потерь)
| <5.5Вт |
| Изоляция для защиты | PELV согласно EN50178 |
| Интерфейсные | |
| Стандартные цифровые входы | 6 потенциально-развязных входов |
| Цифровые выходы | 1 транзистор (DC) 0.5А |
| Стандартные аналоговые входы | 2 дифференциальных входа |
| Аналоговые выходы | 2 потенциально-связанных выхода |
| РТС/КТУ | 1 вход датчика температуры двигателя |
2) Силовой модуль PM230 со встроенным сетевым фильтром класса A 6SL32230DE31-1AA0 обеспечивает питание двигателя в диапазоне мощностей от 0,37 кВт до 250 кВт. Для надежного и гибкого моторного режима используется самая современная технология IGBT с широтно-импульсной модуляцией. Различные защитные функции обеспечивают надежную защиту для силового модуля и двигателя.

Технические данные:
 (номинальная мощность) (номинальная мощность)
| 18.5 кВт |
 (номинальный выходной ток) (номинальный выходной ток)
| 38А |
 (ток базовой нагрузки) (ток базовой нагрузки)
| 32А |
 (коэффициент полезного действия силового модуля) (коэффициент полезного действия силового модуля)
| 0.83 |
 (номинальный входной ток) (номинальный входной ток)
| 33А |
В настоящее время в частотно-регулируемых асинхронных электроприводах применяются двухзвенные преобразователи частоты с промежуточным звеном постоянного тока. Это был один из критериев выбора выше указанного преобразователя.
У них основными элементами являются: выпрямитель, фильтр промежуточного звена и инвертор.
 Рис. Схема силовых цепей частотно- регулируемого асинхронного электропривода:
Рис. Схема силовых цепей частотно- регулируемого асинхронного электропривода:
SA-главный выключатель; FU-линейные предохранители; KM-главный контактор; ZF1-входной фильтр; LR1-входной реактор; UD-выпрямитель; CB- фильтр звена постоянного тока; UW-устройство торможения; UZ-автономный инвертор напряжения; LR2- выходной реактор; ZF2- выходной фильтр; M - асинхронный двигатель;
Инвертор представляет собой коммутатор на полупроводниковых силовых ключах. Мы используем двухзвенный преобразователь частоты с автономным инвертором напряжения, который обеспечивает заданную форму выходного напряжения.
Расчет энергетических характеристик системы ПЧ-АД
Основные энергетические характеристики и анализ показателей эффективности.
1. Коэффициент полезного действия – используется для оценки экономичности преобразования энергии системой преобразователь частоты - асинхронный двигатель.
в установившемся режиме
 0.862*0.88 = 0.758
0.862*0.88 = 0.758 


где  - активная мощность, потребляемая двигателем от преобразователя,
- активная мощность, потребляемая двигателем от преобразователя,
 – полезная мощность на валу двигателя
– полезная мощность на валу двигателя
2. Мощность потерь энергии в асинхронном двигателе.
Анализ потерь энергии в режимах работы электропривода важен сточки зрения экономичности работы системы, а так же для оценки теплового состояния при осуществлении выбора или проверки двигателя по условию нагрева.
Для частотного способа регулирования, важными видами потерь являются:
1) потери в обмотки статора  и обмотки ротора
и обмотки ротора  , так как они обусловлены первыми гармониками токов. Данные потери пропорциональны квадратам их токов.
, так как они обусловлены первыми гармониками токов. Данные потери пропорциональны квадратам их токов.
 =
=  Вт
Вт
 А
А
 - модуль результирующего вектора тока статорной обмотки
- модуль результирующего вектора тока статорной обмотки
 =
= 
 А
А
 - модуль результирующего вектора тока роторной обмотки
- модуль результирующего вектора тока роторной обмотки
2)Механические потери ( ) – это потери, которые определяются выражением:
) – это потери, которые определяются выражением:

Где  - механические потери при номинальной скорости вращения двигателя;
- механические потери при номинальной скорости вращения двигателя;
 - номинальная скорость вращения двигателя;
- номинальная скорость вращения двигателя;
3) Добавочные потери  двигателя при работе в номинальном режиме определяются по формуле:
двигателя при работе в номинальном режиме определяются по формуле:
 0 Вт =11.55 Вт
0 Вт =11.55 Вт
Суммарная мощность потерь электроэнергии в асинхронном двигателе при частотном регулировании скорости определяется:
 =
=  Вт +
Вт +  +
+  + 11.55 Вт = 671.55
+ 11.55 Вт = 671.55 
3) Мощность потерь электроэнергии в преобразователе частоты.
В преобразователе частоты с автономным инвертором напряжения, который питается от не управляемого выпрямителя, должны быть учтены следующие виды потерь:
1) потери в вентилях не управляемого выпрямителя и силовых ключей автономного инвертора
2) потери в коммутирующих реакторах и фильтрах электромагнитной совместимости на выходе выпрямителя
3) потери в конденсаторах фильтра звена постоянного тока и выходного фильтра
4) потери в защитных RC – цепях
Потери в вентилях выпрямителя и ключах инвертора составляют основную долю потерь мощности в преобразователе частоты, из-за чего их расчет является наиболее важным. Однако большая сложность состоит в учете дискретных и нелинейных свойств, преобразователя частоты, что сказывается на точном определении электрических потерь аналитическими методами, поэтому при расчете принимают ряд допущений. К ним относят пренебрежение коммутационными процессами в инверторе и выпрямителе, что позволяет сделать описание самих процессов по непрерывным и полезным составляющим.
Пусть электрические потери в преобразователе частоты, состоят из электрических потерь в источнике питания автономного инвертора и потерь в самом инверторе.
 (что сходится с паспортными данными)
(что сходится с паспортными данными)
 электрические потери в источнике питания АИН
электрические потери в источнике питания АИН
Электрические потери источника питания включают потери коммутирующих реакторов, неуправляемого выпрямителя и реактора сглаживающего LC -фильтра звена постоянного тока. Тогда представим их в виде суммы составляющих.
 кВт (что сходится с паспортными даными)
кВт (что сходится с паспортными даными)
где  потери в меди обмоток входных коммутирующих реакторов;
потери в меди обмоток входных коммутирующих реакторов;

 активное сопротивление обмотки реактора;
активное сопротивление обмотки реактора;  - эффективное значение основной гармоники тока
- эффективное значение основной гармоники тока
 электрические потери в вентилях выпрямителя;
электрические потери в вентилях выпрямителя;

Где  граничное падение напряжения на диоде;
граничное падение напряжения на диоде;
 дифференциальное сопротивление диода для прямого тока;
дифференциальное сопротивление диода для прямого тока;
 среднее значение тока диода
среднее значение тока диода
 эффективное значение тока диода
эффективное значение тока диода
 потери в меди обмотки реактора сглаживающего фильтра
потери в меди обмотки реактора сглаживающего фильтра

Следовательно, электрические потери в источнике питания с автономным инвертором напряжения зависят от активной мощности, которая потребляется двигателем.
 электрические потери в инверторе напряжения, их можно представить в виде суммы составляющих
электрические потери в инверторе напряжения, их можно представить в виде суммы составляющих
 (что сходится с паспортными данными)
(что сходится с паспортными данными)
 электрические потери в меди обмотки выходного реактора
электрические потери в меди обмотки выходного реактора

где  активное сопротивление обмотки реактора
активное сопротивление обмотки реактора
 электрические потери в силовых ключах инвертора, выражаются формулой
электрические потери в силовых ключах инвертора, выражаются формулой

где  мощность потерь энергии в силовом ключе
мощность потерь энергии в силовом ключе
В автономных инверторах напряжения используются силовые ключи на IGBT-транзисторах, которые, как известно, обладают двухсторонней проводимостью.
4) Суммарные потери энергии
В системе преобразователь частоты – асинхронный двигатель, общие потери энергии выражаются функционалом:

где  мгновенная мощность суммарных потерь в системе
мгновенная мощность суммарных потерь в системе
 время переходного процесса
время переходного процесса