Классическая механика. Лекция 1. Кинематика
1. Кинематика – это раздел механики, в котором изучаются способы математического описания движения тел. При этом причины движения не рассматриваются.
2. Система отсчета. Движение тела изучается в системе отсчета. Система отсчета состоит из трех обязательных компонентов:
2.1. Тело отсчета, относительно которого можно наблюдать и изучать движение тела
и инструментов для измерения движения тела:
2.2. Система координат, связанная с телом отсчета
Часы
3. Единицs измерения. Для измерения положения точки изучаемого тела в системе отсчета используются единицы длины и времени:
3.1. Эталон длины, называемый метр. Исторически за 1м принята длине парижского меридиана, деленная на 40 000 000. Современное определение метра базируется на мировой константе – скорости света. Метр — длина пути, проходимого светом в вакууме за интервал времени 1/299 792 458 секунды.
3.2. Для измерения времени между событиями, используется эталон времени – секунда. 1 секунда ранее определялась, как 1/86400 часть суток. Современное определение: Секунда — время, равное 9 192 631 770 периодам одного из видов излучения атома цезия-133.
4. Виды тел и движений, которые они совершают:
4.1. Самые сложные движения могут совершать деформируемые тела. Тело называется деформируемым, если расстояние между какими – либо его двумя точками могут изменяться во времени. Такие тела могут и совершать движения, как единое тело и его части могут двигаться друг относительно друга. Вообще говоря, все тела могут деформироваться, в той или иной степени.
4.2. Поэтому рассмотрим более простую модель тела– абсолютно твердое тело. Оно не может деформироваться. Простейшие формы движения такого тела – это поступательное и вращательное.
4.2.1. Поступательным называется движение, при котором все точки тела двигаются по одинаковым траекториям.
4.2.2. Вращательным называется движение тела, при котором у тела имеется ось вращения, т.е. прямая, все точки которой неподвижны. Все остальные точки тела движутся по окружностям, лежащим в плоскости перпендикулярной оси вращения и имеющим центр на этой оси. Сама ось неподвижна. Впрочем, возможно движение, когда ось вращения изменяет свое положение, но этот сложный вариант в школе не рассматривается.
4.2.3. Существует особый вид неравномерного движения – колебательное. Тело колеблется, если оно совершает движения, которые повторяются через некоторые промежутки времени. Если эти промежутки одинаковые, то такие колебания называются периодическими. Колебательное движение может состоять и из поступательных и из вращательных движений.
4.3. Материальная точка (сокращенно МТ), простейшая модель тела – это тело, размерами которого в данной модели или в задаче можно пренебречь. Также тело можно рассматривать, как МТ в случае поступательного движения абсолютно твердого тела, т.к. при этом движении все точки тела двигаются по одинаковым траекториям.
Описание положения и движения МТ в системе отсчета.
5.1. Положение МТ в системе отсчета определяется посредством системы координат, связанной с телом отсчета. Существуют различные системы координат. В данном курсе физики будет использоваться две: декартова и полярная. Вид и размещение системы координат выбираются произвольно, исходя из удобства в конкретной задаче.
В декартовой системе координат положение точки в пространстве определяется тремя числами – проекциями этой точки на оси координат. Если движение МТ происходит в плоскости, то достаточно двух координат, а если по прямой, то достаточно и одной.
Полярная система координат будет рассмотрена позже при изучении движения МТ по окружности.
5.2. Движение МТ.
5.2.1. Траектория движения -- это линия, вдоль которой движется МТ.
5.2.2. Путь L – это длина траектории от начала движения до его конца. Причем если точка движется сначала вперед, а потом по той же траектории назад, то пути вперед и назад складываются. Таким образом, путь всегда L >0, т.е. это вещественное положительное число.
5.2.3. Среднепутевая скорость. Ее обычно называют просто средней скоростью. Это отношение пути L, пройденного МТ ко времени Δt, которое на это было потрачено. Vср = L / Δt.
Размерность скорости [V] = м/с. Единица измерения скорости 1 м/с.
Полезно запомнить, что 
5.2.4. Перемещение МТ - это направленный отрезок, соединяющий начальную и конечную точку движения МТ.Величина, которая характеризуется не только числовым значением, но и направлением, называется вектор. Здесь векторная величина будет обозначаться буквой, выделеннаяжирным шрифтом. Обычно вектор обозначается стрелкой над буквой.
Перемещение – это вектор S, соединяющий начальную (1) и конечную (2) точку движения. Модуль перемещения | S | - это длина вектора. Она измеряется в метрах. Проекция вектора на ось координат Sx – это число, равное разнице между проекцией конца вектора 2х и проекцией начала 1х:
Sx = 2x – 1x и Sy = 2y – 1y.
Проекции Sx и Sy –скаляры. Модуль вектора, может быть вычислен по его проекциям по теореме Пифагора:  , угол наклона S к оси Х может быть вычислен через тангенс угла: tg α = Sy /Sx
, угол наклона S к оси Х может быть вычислен через тангенс угла: tg α = Sy /Sx
5.2.5. Мгновенная скорость. Пусть МТ за время Δt перемесилась из точки 1 в точку 2 по некоторой траектории, совершив перемещение Δ S. Перемещение, совершенное МТ в единицу времени V ср = Δ S /Δt называется средней скоростью. Скорость – это вектор, направленный так же, как перемещение. Единица измерения скорости 1 м/с. Если мы устремим время измерения к нулю Δt →0, то точка 2 устремиться к точке 1, а вектор V станет касательной к траектории в точке 1, а его модуль | V ср|→ V. Полученный таким образом вектор V называется мгновенной скоростью МТ
Мгновенная скорость – это вектор, показывающий направление перемещения, и его величину в единицу времени. Вектор скорости – функция времени: V = V (t). Скорость может изменяться, как по величине, так и по направлению.
Действия над векторами
6.1. Равенство векторов. Два вектора считаются равными, если равны их длины (модули), они параллельны друг другу и стрелки направлены в одну сторону. Таким образом, если вектор переместить параллельно самому себе, то новый вектор будет равен старому.
6.2.
Сложение векторов. Пусть МТ совершит последовательно два перемещения: S 1 и S 2. Результатом этих перемещений будет направленный отрезок S 3, который получится, если начало второго отрезка приложить к концу первого. Это способ сложения перемещений является иллюстрацией общего правила сложения векторов, так называемого правила треугольника: S3 = S1 + S2
6.3. Умножение вектора на число. Если вектор А умножить на число k, то получится вектор В = k A. Направление В совпадает с направлением А. Стрелка направлена в ту же сторону, что и у вектора А, если k > 0 и в противоположную, если k < 0. Модуль вектора | B | = k | A |. В частности, (– А) или (-1) А – это такой же вектор, но направленный в противоположную сторону
7. Построение графиков зависимости параметров движения от времени. График траектории в осях X,Y не дает полного представления о движении, поскольку на нем не видно время. Чтобы увидеть полную картину движения, нужно строить зависимости от времени таких параметров, как координата, перемещение, путь, скорость и ускорение.
Все такие графики будем строить методом последовательных приближений. Пусть исходная функция x = f(t) и ее график проходит через точку x=0 и t=0.
Если нам нужно построить график функции проходящий через точку x = x0 и t=0, то это будет функция x= f(t) + x0, и ее график надо сдвинуть на x0 вдоль оси X.
Если нам нужно построить график функции, проходящий через точку x=x0 и t= t0, то это будет функция x= f(t – t0) + x0, и ее график надо сдвинуть на величину t0 вдоль оси t.
8. Уравнение движения. Зависимость координаты точки от времени x(t) называется уравнением движения. Пусть график уравнения движения – это кривая в осях (X,t). Построим касательную к этой кривой в точке А0. Для этого проведем секущую через точку А0 и другую, близкую к ней точку А, а затем устремим точку А к точке А0. Секущая будет поворачиваться, пока в пределе не станет касательной. Как видно из рисунка tg угла наклона касательной к оси t равен: tg ϕ = Δх / Δt. а это в свою очередь мгновенная скорость в точке А0.: tg ϕ = V, таким образом угол наклона касательной к графику перемещения тела, определяет его скорость.
9. Определение перемещения тела по графику скорости.
Пусть тело движется с переменной скоростью, график которой изображен на рисунке. Разобьем интервал времени движения тела на маленькие кусочки Δti и построим на каждом таком интервале прямоугольник, высота которого примерно равна значению скорости на этом интервале V(t). Будем считать, что на маленьком интервале Δti скорость постоянна. Тогда перемещение, совершенное на этом интервале, равно ΔSi= V(t) Δti. С другой стороны, V(t) Δti = ΔFi – площади этого прямоугольника. Тогда сумма площадей этих прямоугольников равна перемещению за весь интервал времени. И если Δti →0, а число интервалов → ∞, то сумма этих площадей будет стремиться к площади под кривой графика скорости. Таким образом перемещение тела за время Δt равно площади под графиком его скорости за это время.
10. Прямолинейное движение – это простейшая модель движения МТ, когда ее траектория – прямая линия. Поскольку систему координат можно располагать любым удобным для описания движения способом, то направим ось Х вдоль траектории движения. Тогда движение описывается, как изменение единственной координаты Х. Перемещение вдоль осей Y и Z отсутствует, т.е. Sy = Sz = 0, а Sx = Δх = х –х0, где х и х0 – конечное и начальное положения МТ. Отметим, что вектор перемещения в одномерном случае можно рассматривать и как вектор, и как скаляр, т.к. существуют только два возможных направления S – вдоль оси Х и против оси Х. Это соответствует знаку скаляра S > 0 или S < 0.
10.1. Прямолинейное равномерное движение. Если за любые равные промежутки времени МТ совершает одинаковые перемещения, то такое движение называется равномерным. Т.е. при прямолинейном равномерном движении Vx = Δх/Δt = const и скорость не изменяется ни по величине, ни по направлению.
При прямолинейном движении скорость, также, как и перемещение можно считать и скаляром, и вектором. Если вектор V1 направлен против оси Х, то V1x< 0, если вдоль оси Х, то V2x> 0
Для прямолинейного равномерного движения (сокращенно ПРД) уравнение движения можно получить из определения скорости: Vx = Δx/ Δt = (x – x0) /(t – t0). Поскольку в данном случае Sy = Sz = 0, то и Vy = Vz =0, можно обозначить Vx, как V. Тогда уравнение движения будет иметь вид: x = x0 + V (t - t0).Если t0 =0, тоx = x0 + V t. Уравнение для перемещения: S = x – x0 = Vt
10.2. Построение графиков ПРД.
Построим сначала график зависимости скорости от времени. Поскольку при ПРД V-const, то графиком будет прямая линия, параллельная оси X.
Построим теперь график перемещения при ПРД. Исходная функция будет x = Vt. Ее график – это прямая, проходящая через точку (0,0). Тангенс угла наклона tg α графика уравнения движения равен Δх/Δt = V скорости в данный момент времени. Если V > 0, то прямая идет снизу вверх, а если V < 0, то сверху вниз. Если начальное положение тела в точке t0, x0, то ее уравнение, как было показано в п.6 имеет вид: x = x0 + V(t – t0). В самом деле, при t = t0, → х = х0
11. Принцип независимости перемещений. Если точки участвует одновременно в нескольких перемещениях, то результирующее перемещение представляет собой векторную сумму этих перемещений: S (t) = S 1(t) + S 2(t) + S 3(t) …. Иначе говоря, перемещения не зависят друг от друга. Это так называемый принцип суперпозиции (наложения), который справедлив для многих явлений физики, например, для описания результата взаимодействий тела с несколькими другими телами.
Функции Sx (t) и Sy (t) не зависят друг от друга. Т.е. может быть, что вдоль оси Y МТ вообще не двигается, т.е. Sy (t) = 0, или вдоль ось X тело движется равномерно, а вдоль Y – ускоренно.
Этот же принцип справедлив и для скорости тела, участвующего одновременно в нескольких движениях. Если равенство S (t) = S 1(t) + S 2(t) разделить на Δt, то получим: V (t) = V 1(t) + V 2(t).
Используя принцип независимости перемещений найдем формулу для расчета скорости тела при переходе из одной системы отсчета в другую. Предположим, что МТ в некоторой системе отсчета X′Y′ имеет скорость V ′. Назовем эту систему отсчета «собственной». Пусть собственная система отсчета сама движется в некоторой другой «лабораторной» системе отсчета, которую будем условно считать неподвижной, со скоростью V 0. Пусть тело совершит за время Δt перемещение S ′ в собственной системе отсчета, а собственная система отсчета за то же время совершит перемещение S0 в лабораторной системе отсчета. Поскольку эти перемещения независимы, можно утверждать, что тело совершит в лабораторной системе отсчета перемещение S = S ′ + S 0. Разделив это равенство на Δt получим V = V ′ + V 0.. Это правило сложения скоростей, которое формулируется так:
«Скорость тела в неподвижной системе отсчета равна векторной сумме его скорости в движущейся системе отсчета плюс скорость движущейся системы отсчета относительно неподвижной ».
12. Равноускоренное прямолинейное движение МТ.
12.1. Ускорение. Пусть вектор скорости V за время Δt изменится на величину Δ V. Δ V – это тоже вектор. Причем вектор Δ V может быть направлен, как вдоль вектора V так и под любым углом к нему. Вектор aср = Δ V /Δt называется средним ускорением тела. Если Δt→0, то среднее ускорение стремиться к мгновенному ускорению aср → a. Чтобы понять смысл вектора ускорения разложим его на две составляющие: одна a τ – вдоль касательной к траектории, а значит и вдоль вектора V; другая – перпендикулярно касательной a n. Вектор a τ, называется тангенциальным ускорением. Он показывает, как изменяется модуль вектора V в единицу времени. Вектор a n называется нормальным или центростремительным ускорением. Он показывает, как изменяется направление вектора V в единицу времени. Размерность ускорения [м/c2], единица измерения ускорения 1 м/с2 или, как говорят один метр в секунду за секунду.
12.2. Уравнения прямолинейного равноускоренного движения. Траектория движения – прямая линия, значит, положение МТ задается одной координатой Х. Равнопеременное – значит ускорение постоянно a(t) = const. Т.к. движение прямолинейное, то ускорение направлено вдоль траектории – оси Х и его можно считать скаляром. Поскольку a = ΔV/Δt, то V-V0 = a Δt и, считая, что t0=0, получим уравнение для скорости V(t) = V0 +at. Поскольку а – скаляр то он может быть, как a>0, так и a<0. Соответственно, движение при этом будет или равноускоренным или равнозамедленным.
Зависимость координаты МТ от времени найдем с помощью графика функции V(t). Как было сказано выше площадь под этим графиком равна перемещению ΔF =Δх. Фигура под графиком – трапеция. Ее площадь F= Δx = Δt (V2 + V1)/ 2, где Δt = t2 –t1. Будем считать, что t1 =0, а t2 заменим на t. Тогда: V2 =V1 +at, и уравнение равнопеременного движения примет вид: x(t) = x0 + V0t + at2/2. Уравнение для перемещения S = x – x0 = V0t + at2/2
12.2.1. Построим график уравнения движения x(t) = x0 + V0t + at2/2. Понятно, что это парабола. Если a>0, то ветви параболы направлены вверх, а если a<0, то вниз. Координаты вершины параболы (tm, xm), найдем следующим образом. В вершине параболы касательная к ее графику горизонтальна, значит скорость в этой точке =0. Т.е. V = V0 + atm =0. Отсюда tm = - V0 /a. Подставим это tm в уравнение движения. Получим xm = - V02/2a +x0. Поскольку xm – это смещение графика параболы вверх, а tm – смещение графика параболы вправо, то уравнение параболы будет иметь вид: x = a/2(t - tm)2 + xm. Найдем в осях координат точку tm, xm и построим параболу x = at2 / 2 с вершиной в этой точке (см. рис ниже).
12.2.2. 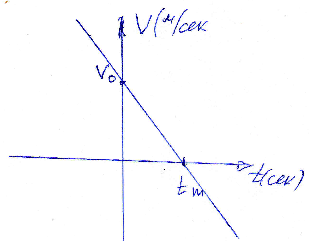
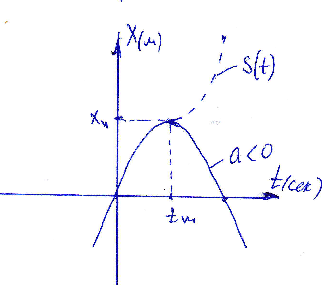 Рассмотрим случай равнозамедленного движения a<0 на примере движения тела, брошенного вертикально вверх. Под действием силы тяжести любое тела на поверхности Земли движется с ускорением, направленным вниз и равным g =9,81 м/с2 (примерно 10 м/с2). Направим ось координат X вверх. Тогда проекция ускорения тела на ось Х равна a= - g. Пусть тело имеет в точке х=0 начальную скорость V0, направленную вверх. Скорость V изменяется от V0 при t=0 до нуля в точке максимального подъема (tm, xm), а затем изменяет знак и начинает по модулю расти. Из симметрии параболы понятно, что в точке 2tm тело падает на землю: x=0. Уравнение для скорости при равноускоренном движении имеет вид имеет вид): V = V0 + at. Но поскольку а = - g, то V = V0 – gt. Уравнение движения в общем виде x(t) = x0 + V0t + at2/2 для данного случая приобретает вид: x = V0 t – gt2/2. Время подъема – это время достижения точки, где V = 0. Т.е. tm = V0/g. Максимальная высота подъема xm = V02/2g. Для построения графика движения находим точку tm, xm и строим параболу x= - gt2/2 с вершиной в этой точке.
Рассмотрим случай равнозамедленного движения a<0 на примере движения тела, брошенного вертикально вверх. Под действием силы тяжести любое тела на поверхности Земли движется с ускорением, направленным вниз и равным g =9,81 м/с2 (примерно 10 м/с2). Направим ось координат X вверх. Тогда проекция ускорения тела на ось Х равна a= - g. Пусть тело имеет в точке х=0 начальную скорость V0, направленную вверх. Скорость V изменяется от V0 при t=0 до нуля в точке максимального подъема (tm, xm), а затем изменяет знак и начинает по модулю расти. Из симметрии параболы понятно, что в точке 2tm тело падает на землю: x=0. Уравнение для скорости при равноускоренном движении имеет вид имеет вид): V = V0 + at. Но поскольку а = - g, то V = V0 – gt. Уравнение движения в общем виде x(t) = x0 + V0t + at2/2 для данного случая приобретает вид: x = V0 t – gt2/2. Время подъема – это время достижения точки, где V = 0. Т.е. tm = V0/g. Максимальная высота подъема xm = V02/2g. Для построения графика движения находим точку tm, xm и строим параболу x= - gt2/2 с вершиной в этой точке.
Следует обратить внимание на разницу между перемещением и путем. Модуль перемещения равен пути при прямолинейном однонаправленным движении. Как только направление движения меняется приращение перемещения меняет знак, а приращение пути остается положительным.
12.2.3. Формула, связывающая начальную и конечную скорость равнопеременного движения с путем и ускорением. Для этого исключим время из системы уравнений: Vk= Vн +at и x = x0 + Vнt + at2/2, где Vн - начальная, а Vk – конечная скорость движения Для этого выразим t из первого уравнения t= (V – V0) /a и подставим его во второе уравнение. Получим очень полезную для решения задач формулу Vк2 – Vн2 = 2a (x – x0) = 2aS, где S – перемещение.
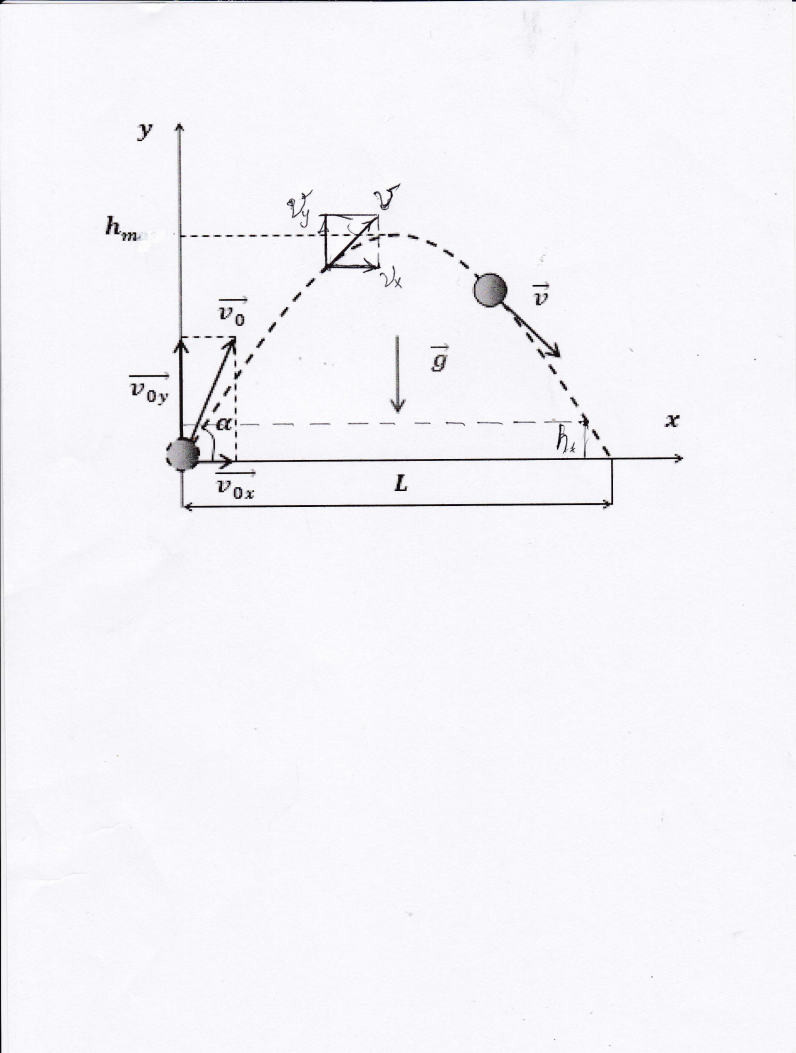
13. Движение тела, брошенного под углом к горизонту. Согласно принципа независимости движений, движение тела под углом к горизонту можно рассматривать, как два независимых движения:
1. Прямолинейное равномерное движение вдоль оси Х. Поскольку вектор ускорения g направлен вдоль оси Y, то движение вдоль оси Х происходит с постоянной скоростью
2. Прямолинейное равноускоренное движение вдоль оси Y с ускорением g.
Начальные скорости обоих движений можно вычислить, как
V0x = V0 cos α и V0y = V0 sin α
Уравнение прямолинейного равномерного движения в общем виде:
 V = V0 = const и x = x0 + Vt применительно к данной задаче имеют вид:
V = V0 = const и x = x0 + Vt применительно к данной задаче имеют вид:
V = V0x
x = V0x t
Уравнение прямолинейного равноускоренного движения в общем виде:
V = V0+ at и x = x0 + V0 t + at2/2 применительно к данной задаче имеют вид:
Vy = V0y – gt
y = V0yt – gt2/2
Теперь имея уравнения движения, можно легко найти любые требуемые величины в данной задаче.
1. Время подъема tm до верхней точки hm можно найти из условия, что вертикальная скорость Vy в этой точке равна нулю: Vy = V0y – gtm =0. Отсюда tm = V0y /g
Время всего полета tп, если тело летит до уровня земли можно найти из условия: y(tп) =0, т.е. y = V0ytп – gtп2/2 =0. Отсюда tп1 = 0 и tп2 = 2 V0y/g. Т.е. tп = 2 tm
2. Время всего полета tп, если тело летит до высоты y=h1. Условие - y(tп) =h1, т.е.
y = V0ytп – gtп2/2 =h1.
Решаем это квадратное уравнение tп =  . Дискриминант должен быть больше нуля, т.е. V0y2 – 2gh1 > 0, или
. Дискриминант должен быть больше нуля, т.е. V0y2 – 2gh1 > 0, или  1 В обратном случае решений нет, потому, что тело просто не долетит до высоты h1. Два корня уравнения соответствуют двум точкам с высотой h1 на траектории движении тела.
1 В обратном случае решений нет, потому, что тело просто не долетит до высоты h1. Два корня уравнения соответствуют двум точкам с высотой h1 на траектории движении тела.
3. Максимальную высоту подъема тела hm получим, подставив время tm = V0y /g подъема в уравнение для координаты hm = y(tm) т.е. hm = V0ytm – gtm2/2 = V0y2/2g
4. Дальность полета получим умножив время полета tп на его постоянную скорость вдоль оси Х: L = tп V0x. Для случая полета до высоты y = 0 дальность будет: L = 2 V0y V0x /g = V02/g * 2 sin α cos α = V02 /g * sin 2α. Максимальная дальность будет при sin 2α =1, т.е. при угле броска α =450. Lmax = V02/g
5. Найдем скорость тела в какой-либо промежуточной точке траектории. Пусть спрашивается скорость через время t1 после броска. Найдем скорость через ее компоненты вдоль X и Y¸ Vx = Vx0, а Vy = Vy0 – g t1. Тогда модуль скорости по теореме Пифагора  .
.
Угол наклона скорости к оси Х найдем через его тангенс: tg α1 = Vy /Vx = Vx0/ (Vy0 – g t1)
6. Чтобы построить график траектории движения y(x) запишем уравнение движения вдоль оси X: x = V0x t и уравнение движения вдоль оси Y: y = V0yt – gt2/2. Выразим время t из первого уравнения и подставим во второе. Получим: y = V0y/V0x * x – g/2V0x2 * x2, т.е. траектория движения является параболой.
14. Равномерное движение МТ по окружности. Движение МТ по окружности удобно описывать в полярных координатах (R, ϕ).
Полярная система координат на плоскости представляет собой одну ось координат (полярная ось) и радиус –вектор, начинающейся в точке начала отсчета (полюсе) и заканчивающийся в точке М, положение которой он определяет. Положение этой определяемой точки в полярной системе координат определяется длиной радиус-вектора r (радиальная координата) и углом его поворота относительно полярной оси ϕ (азимут): M(r,ϕ)
Радианная мера угла. Для измерения угла ϕ в физике используется не градусы, а радианы. Радианная мера – это отношение дуги, на которую опирается угол к радиусу: ϕ = ͝͝ AB/R. Полный угол в радианах ϕпол= 2π R/R = 2π. Поскольку в градусах полный угол = 360⁰, то 1 рад = 360/2π = 57,3⁰.
Угловая скорость – это скорость изменения радианного угла (азимута) в единицу времени ω = Δϕ/Δt. Размерность угловой скорости: [ω]= 1/сек.
Если материальная точка движется по окружности, то ее путь – это длина дуги окружности ΔL = ͝͝ AB ΔL =Δϕ R. Разделим это равенство на Δt и получим: ΔL/ Δt = R Δϕ\Δt. Но, ΔL/ Δt – это линейная скорость, значит: V = ω R.
Период Т– это время одного оборота при равномерном движении тела по окружности. Когда тело делает полный круг, Δϕ = 2π, а Δt = Т. Угловая скорость ω = Δϕ/Δt = 2π /Т, отсюда: T = 2π/ω.
Частота – это число оборотов в секунду ν = 1/T. Размерность частоты [ν] = 1/c называется Герц (Гц).
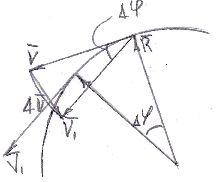 При движении по окружности вектор скорости V изменяет свое направление, следовательно – это движение с ускорением. Поскольку модуль вектора не меняется, то это нормальное ускорение, которое перпендикулярно вектору скорости и направлено оно к центру окружности. Оно называется центростремительным. Ускорение по определению а цс = Δ V /Δt. На рисунке видно, как тело, перемещаясь на угол Δϕ изменяет свою скорость с V на V1, за счет прибавления ΔV. Из треугольника скоростей видно, что дуга VV1 = V Δϕ (из определения радианной меры угла). Но дуга VV1 при малых Δϕ стремится к хорде ΔV. Таким образом, ΔV= V Δϕ. Разделим это уравнение на Δt.
При движении по окружности вектор скорости V изменяет свое направление, следовательно – это движение с ускорением. Поскольку модуль вектора не меняется, то это нормальное ускорение, которое перпендикулярно вектору скорости и направлено оно к центру окружности. Оно называется центростремительным. Ускорение по определению а цс = Δ V /Δt. На рисунке видно, как тело, перемещаясь на угол Δϕ изменяет свою скорость с V на V1, за счет прибавления ΔV. Из треугольника скоростей видно, что дуга VV1 = V Δϕ (из определения радианной меры угла). Но дуга VV1 при малых Δϕ стремится к хорде ΔV. Таким образом, ΔV= V Δϕ. Разделим это уравнение на Δt.
Получим ΔV/ Δt = V Δϕ/Δt = V ω = V2/R. Следовательно, центростремительное ускорение aцс = V2/R = ω2R.
15. Формулы и константы.
15.1. Равномерное прямолинейное движение Уравнения движения: V=const;
x = x0 +Vt;
S = Δx = x - x0 = Vt
15.2. Равноускоренное прямолинейное движение Уравнения движения: а = const;
V(t) = V0 +at;
x = x0 + V0t + at2/2
S = V0t + at2/2
Координаты вершины параболы: t = - V0/a; xm = - V02/2a
Соотношение между скоростями: Vк2 – Vн2 = 2a S
15.3. Движение по вертикали в однородном поле сил тяжести Уравнения движения: V=V0 – gt;
x = x0 + V0t – gt2/2
tm= V0/g – время подъема тела на максимальную высоту, xm=V02/2g – максимальная высота.
15.4. Движение тела, брошенного под углом к горизонту Время подъема до верхней точки траектории tm = V0y/g, Высота подъема hmax = V0y2/2g, Время всего полета до точки падения tк = 2tm = 2V0y/g. Дальность полета L = 2V0yV0x/g = V02/g * 2sin α cos α = V02/g * sin 2 α Максимальная дальность при α =450 L = V02/2g
15.5. Равномерное движение по окружности
Угловая скорость ω = Δφ/Δt = 2πν
Связь линейной и угловой скорости V=ωR
Период вращения T = 2π/ω
Частота вращения ν = 1/T = ω / 2π
Центростремительное ускорение ацс =V2/R = ω2R