Модуль управления станками с ЧПУ от LaserPiro. Вариант с автономным управлением (https://vk.com/laserpiro)

Предназначен для работы с GRBL совместимыми программами при управлении 2х осевыми выжигателями с ЧПУ. При этом модуль управляет 1-м или 2-мя двигателями по оси Y посредством двух отдельных драйверов.
ХАРАКТЕРИСТИКИ.
Вход управления USB, а также последовательный порт для приема данных от автономных устройств или от модулей WiFi, Bluetootn.
Прошивка GRBL1.1F
Скорость обмена 115200 бит\сек.
Скорость управления шаговыми двигателями до 30000 шагов в секунду.
Дробление шага(микрошаг) только 1\32 шага.
Драйверы шаговых моторов DRV8825.
Максимальный ток двигателей 2,5 А.
Напряжение питания 12 -14 Вольт.
Выходы: Последовательный порт, питание вентилятора, лазер с TTL, моторы, дополнительный разъем на 12 В 1А или 5В 0,2А.
Размер платы 99*49 мм.
Выходные разъемы:
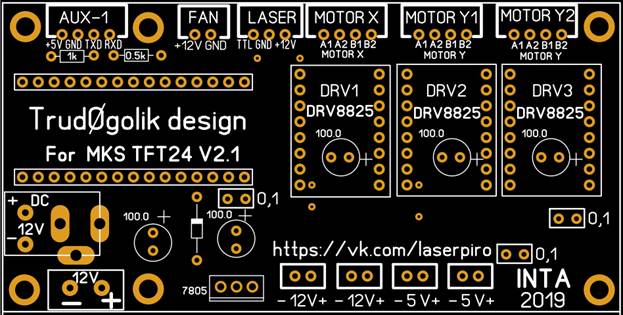
AUX-1 - разъем последовательного порта, по которому может осуществляться управление станком внешними устройствами по проводам или через модули WiFi, Bluetooth. Питание внешнего модуля или сопрягаемых модулей осуществляется от платы с током потребления не более 200 мА. При больших токах применяется радиатор на стабилизаторе 7805 и обдув платы.
FAN – питание 12 вольт на внешний вентилятор, например, обдува рабочего поля.
LASER – Выход на лазер, управляемый по TTL. Штырьки GND и 12V предназначены для питания лазера напряжением 12Воль и током до 3А
MOTOR X – Выход на мотор оси X
MOTOR Y1 – Выход на 1-й мотор оси Y
MOTOR Y2 - Выход на 1-й мотор оси Y
12V - Дополнительные выходы напряжения питания
5V - Дополнительные выходы напряжения питания
Как правильно подключить шаговый двигатель.
Очень часто возникает необходимость подключить шаговый двигатель к устройству управления(контроллеру) без возможности проверки обмоток прибором, омметром, мультиметром.
Не расстраивайтесь, используя обратимость шагового двигателя, т.е. его «генераторную» функцию, мы легко можем найти выводы обмоток и правильно подключить к устройству.
Для того чтобы найти выводы обмоток 4-х выводного двигателя, необходимо найти такую пару выводов, при замыкании которых вал шагового двигателя будет вращаться рукой с усилием. Происходит это потому, что двигатель при вращении вала рукой работает как генератор и замыкание выводов обмотки является подключением нагрузки на эту обмотку. Вторая пара выводов будет работать точно так же, при замыкании проводов вал двигателя вращается с трудом.
Это и есть две обмотки шагового двигателя.


Раз мы нашли пары выводов обмоток, можем их подключить. Допустим, на разъеме мы определили, что выводами одной обмотки являются красный и черный провода, выводами другой – белый и желтый.
Если они включены в разъем так как показано на рисунке, то двигатель можно смело подключать к большинству устройств, т.к. стандартом принято размещение на разъемах выводов обмоток как А1-А2-В1- В2, или В1-В2-А1-А2 где А1 и А2 выводы одной обмотки, а В1 и В2 – выводы другой обмотки(на фото)
Если же выводы обмоток перепутаны, например, чередуются как А1-В1-А2-В2,то можно либо перепаять провода, но лучше просто вынув среднюю пару контактов из разъема, воткнуть их в нужные гнезда. Устройство разъема позволяет делать это многократно.
Нажав сверху отверткой или иглой на зуб-фиксатор вынимаем провод вместе с контактом из корпуса разъема, затем лезвием ножа слегка поднимаем зуб-фиксатор(как показано на фото) и вставляем его в нужное гнездо.

После этого снова проверяем обмотки, закорачивая выводы разъема отрезком провода, и если обмотки размещены правильно – подключаем шаговый двигатель к устройству, не забывая убрать «закоротку».Не стоит волноваться за неправильную полярность, в большинстве случаев направление вращения двигателя можно изменить из программы, а если необходимо поменять направление вращения двигателя без вмешательства в программу или там где это невозможно, меняем выводы одной обмотки местами, например, меняем черный с красным или желтый с белым.Разъемы типа DUPONT можно просто перевернуть «задом наперед», тогда направление вращения двигателя тоже поменяется.На фото разъем типа DUPONT

Настройка двигателей без приборов.
Первое - настройку надо всегда начинать с минимальных токов двигателя.
Ориентировочно определить ток можно по шуму двигателя, чем ток больше, тем сильнее шумит двигатель. Также можно определить по усилию, необходимому для поворота вала вручную, чем больше ток, тем сильнее двигатель. Также можно определить ток по нагреву драйвера или самого двигателя. Чем сильнее греется то и (или) другое, тем больше ток. Но в этом случае увеличивать ток нужно ступенями, выждав время для проверки нагрева.
Оптимальным считается такой ток, когда устройство не имеет пропусков шагов, двигатель не останавливается где хочет, легко преодолеваются небольшие тормозящие усилия на валу, двигатель не шумит, двигатель и драйвер нагреваются не более чем до 40-50 градусов (мизинец терпит такую температуру). Все вышеуказанное должно соблюдаться даже в процессе длительной работы.
Слишком большой ток может являться причиной лишнего дергания привода, стуков, шума и писка двигателей и резонансного шума всей механики.
Неисправности.
Нет соединения с компьютером.
| Признак неисправности | Возможная причина | Способ устранения |
| Нет соединения с компьютером. | Не установлен или старый драйвер CH340 Неиисправна микросхема CH340G Ардуино. | Установить свежий драйвер Заменить микросхему CH340G или плату Ардуино. |
| Греется стабилизатор 7805 | Превышено напряжение питания Превышен ток потребления | Измерить напряжение и если оно больше 14 В заменить блок питания Отключить дополнительные нагрузки по цепи 5 вольт. |
| Греется драйвер DRV8825 | Неправильно подключен шаговый мотор Завышен ток драйвера Неисправен драйвер | Проверить подключение обмоток и подключить верно Проверить напряжение на движке переменного резистора, оно должно быть не более 1,2Вольта Рекомендуется 0,55 -0,85 Вольт Заменить неисправный DRV8825 |
| Длина прохода по оси не соответствует заданной. | Неправильно установлено число шагов на мм в программе управления станком. | Рассчитать и установить в соответствии с приводом и установкой джамперов. |
| При нормальном соединении двигатели не движутся. | Нет питания на двигатели по цепи 12 вольт | Устранить проблему. |
| При подключении USB светодиоды Ардуино не горят. | Неисправен порт USB или кабель. Неисправна Ардуино | Проверить и устранить проблему. Заменить Ардуино |
| При подключении USB горят 3 светодиода на плате Ардуино. | Ардуино прошита прошивкой RIBS Ардуино неисправна | Перепрошить на нужную версию ПО Заменить Ардуино |