Для каждого вида СЭО и ЭСА можно указать ряд параметров и (или) признаков, характеризующих техническое состояние и дефекты (параметры, выраженные электрическими величинами- напряжение, ток, частота, сопротивление, индуктивность и т. п.; параметры, выраженные неэлектрическими величинами - температура, скорость, усилие и т. п.; признаки- наличие следов нагара на контактной поверхности, трещин, пыли, влаги и т. п.). В зависимости от применяемого метода диагностирования используются те или иные из них, называемые диагностическими параметрами и (или) признаками.
Если значения диагностических параметров (признаков) объекта не поддаются непосредственному измерению, то они находятся обработкой значений других параметров, связанных с диагностическими известными зависимостями.
Определение диагностических параметров формальными методами предполагает построение и анализ диагностической модели объекта. Такие методы дают возможность выбрать диагностические параметры, достаточные или необходимые для проведения соответствующего вида диагностирования; проверки исправности, работоспособности, функционирования, поиск; дефекта.
Выбор совокупности диагностических параметров является ответственной задачей разработки системы технического диагностирования СЭО и ЭСА. Успешное решение этой задачи возможно только при глубоком знании и тщательном анализе СЭО и ЭСА и их элементов как объектов диагностирования. При выборе диагностических параметров учитывается их информативность, доступность для измерения и контроля, стоимость и время измерения.
Предпочтение отдается параметрам, имеющим прямую функциональную связь с техническим состоянием диагностируемого элемента или объекта, обладающим большей информативностью, относительно легко и по возможности непосредственно измеряемым простыми средствами.
Контролировать все параметры, определяющие техническое состояние сложных СЭО и ЭСА (полный контроль), практически невозможно, поэтому СТД контролируют некоторое множество наиболее существенных параметров.
Выбор параметров для контроля технического состояния. При выборе параметров для контроля технического состояния важное значение имеют требуемая полнота контроля и используемая диагностическая модель СЭО и ЭСА.
Если диагностическая модель задана в виде аналитической зависимости обобщенного показателя технического состояния от определяющих параметров, то необходимо контролировать все параметры, учитываемые моделью, и при этом обеспечивается полный контроль технического состояния по обобщенному показателю.
Минимальная совокупность параметров для контроля технического состояния СЭО и ЭСА по их функционально-структурной модели может быть выбрана с помощью матрицы взаимозависимости выходных функций. Например, полный контроль технического состояния устройства, функционально-структурная модель которого представлена на рис. 4.3, может быть осуществлен при выборе минимальной совокупности контролируемых параметров, которая зависела бы от состояния всех функциональных элементов Э1...Э5устройства. Из матрицы, представленной в табл. 4.4, следует, что такими параметрами являются Z3и Z5, так как при отказе любого из пяти функциональных элементов Э1…Э5обязательно произойдет недопустимое изменение значений по крайней мере одной из выходных функций Z3или Z5.
Минимальная совокупность контролируемых параметров при известной логической модели выбирается из условия работоспособности объекта диагностирования. Для схемы логической модели, представленной на рис.4.3, условие работоспособности (4.7) соответствует исправному состоянию всех пяти функциональных элементов,
т.е. конъюнкция выходных функций всех элементов должна быть равна единице. Чтобы определить минимальную совокупность контролируемых параметров, нужно конъюнкцию выходных функций (4.7) выразить через функции состояния и выходные параметры всех элементов модели:
 (4.18)
(4.18)
Согласно логической модели
 (4.19)
(4.19)
Выходной параметр х32является независимым, так как при проверке обратная связь разрывается. С учетом формулы (4.19) равенство (4.18) может быть представлено в виде

откуда следует, что выходные функции z3 и z5 учитывают изменение состояния всех функциональных элементов логической модели и, значит, могут быть выбраны в качестве минимальной совокупности контролируемых параметров для полного контроля технического состояния устройства.
При отсутствии количественных показателей безотказности функциональных элементов, как указывалось выше, выбор параметров для контроля технического состояния может быть осуществлен с использованием метода экспертных оценок.
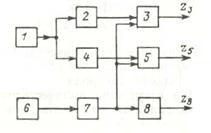
Рис. 4.8. Функциональная схема объекта диагностирования.
Выбор параметров для поиска дефектов. Контролируемые параметры для поиска дефектов выбираются в зависимости от используемой диагностической модели и заданной глубины поиска дефекта. Для объекта диагностирования, модель которого представлена без учета структуры в виде отдельных, не связанных друг с другом функциональных элементов, необходимо контролировать выходные параметры (функции) всех функциональных элементов. Если представлена диагностическая модель объекта с учетом функциональных связей элементов, то при поиске дефекта могут контролироваться выходные параметры не всех функциональных элементов объекта. Сокращение контролируемых параметров достигается путем учета связей между элементами объекта, а также за счет учета только одиночных дефектов (вероятность появления в системе одиночных дефектов значительно выше, чем вероятность одновременного появления двух и более отказов).
Выбор контролируемых параметров для поиска дефекта в системе при известной ее функциональной схеме производится следующим образом. Пусть объект диагностирования, состоящий из восьми функциональных элементов, задан функциональной схемой, показанной на рис. 4.8. На основе анализа этой схемы строится таблица функции неисправности (табл. 4.8), в которой каждая строка определяет двоичный код технического состояния объекта при отказе соответствующего одного элемента.
Состояние ео соответствует состоянию выходов, когда отказавших элементов в объекте нет.
Из табл. 4.8 видно, что коды состояний e0…e8не совпадают, и значит, при контроле всех выходных функций z1…z8 различимы все одиночные отказы элементов в объекте. Чтобы сократить количество контролируемых параметров при поиске одиночных отказов, надо на основе табл. 4.8 построить такую таблицу функций неисправностей, в которой при неизменном числе строк и различии кодов строк было бы меньшее число столбцов, т. е. меньшее число контролируемых параметров.
Таблица 4.8. Таблица функций неисправности для схемы на рис. 4.8.
| ei | zi | |||||||
| e0 e1 e2 e3 e4 e5 e6 e7 e8 | z1 | z2 | z3 | z4 | z5 | z6 | z7 | z8 |
Таблица 4.9. Минимизированная таблица функций неисправностей
| ei | zi | ||||
| e0 e1 e2 e3 e4 e5 e6 e7 e8 | z4 | z5 | z7 | z8 | z2 |
В таблицу с минимальным числом контролируемых параметров (табл. 4.9) прежде всего войдут столбцы с параметрами, соответствующими неразветвляющимся выходам элементов z4,z5,z7,z8.Если контролировать только эти четыре параметра, то, как видно из табл. 4.9, не будут различаться 1-й и 5-й, 2-й и 6-й, 3-й и 4-й дефектные элементы. По табл. 4.8 не трудно установить, что в табл. 4.9 нужно еще включить столбец с параметром z2и тогда все одиночные дефекты в объекте будут различимы.
Таким образом, в результате контроля полученной минимизированной совокупности параметров определяются все одиночные отказы элементов диагностируемой системы; коэффициент глубины поиска дефекта (4.1) равен единице. Если произвести контроль всей минимизированной совокупности параметров невозможно, коэффициент глубины поиска дефекта уменьшается. В этом случае его значение легко рассчитать по данным табл. 4.9.