При пуске двигателя должны выполняться следующие требования:
Ø Малая величина пускового тока;
Ø Достаточный по величине пусковой момент;
Ø Плавное нарастание скорости;
Ø Простота и экономичность пуска.
Для двигателей с короткозамкнутым ротором используют прямой пуск и пуск при пониженном напряжении.
a) Прямой пуск: обмотка статора непосредственно включается в сеть на полное напряжение. Этот способ возможен при мощности двигателя до 15-20 кВт. Но при большей мощности сети, этот способ можно использовать для более мощных двигателей – до 50 кВт.
b) Пуск при пониженном напряжении: Уменьшение напряжения сопровождается уменьшением пускового тока. Этот способ приводит к уменьшению начального пускового момента, который пропорционален квадрату напряжения на фазах обмотки стартера. В связи со значительным снижением пускового момента указанный способ пуска применим только при малых нагрузках на валу.
3. Регулирование – это принудительное изменение частоты вращения при постоянной нагрузке на валу. Недостатком асинхронных двигателей является плохая регулировочная способность.
Формула частоты вращения ротора:  .
.
Из этого равенства следует, что частоту вращения изменять можно следующими способами:
· Регулирование изменением частоты тока статора  ;
;
· Регулирование изменением числа пар полюсов p;
· Регулирование изменением подводимого напряжения.
Перечисленные методы применяют для асинхронных двигателей с короткозамкнутым ротором.
4. При  число парполюсов
число парполюсов 
Тогда относительное скольжение  .
.
5. Рис.1 – соединение фаз в «звезду»; Рис.2 – соединение фаз в «треугольник»

6. Необходимыми условиями вращающегося магнитного поля являются:
|
|
Ø Пространственный сдвиг осей катушек статора;
- обеспечивается соответствующим расположением намагничивающих катушек н магнитопроводе статора. Оси фаз обмотки смещены на 120  .
.
Ø Временный сдвиг токов в катушках статора;
- обеспечивается подачей на катушки статора трехфазной системы напряжений. При включении двигателя в трехфазную сеть в обмотке статора устанавливается система токов одинаковой частоты и амплитуды, периодические изменения которых относительно друг друга совершаются с запаздыванием на 1/3 периода.
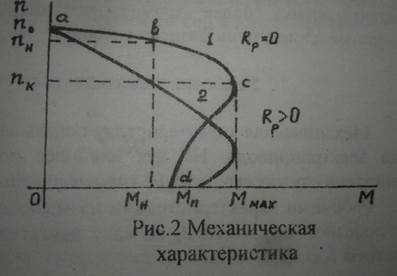
7. Механическая характеристики асинхронного двигателя:
8. Коэффициент мощности  при холостом ходе имеет малое значение (примерно 0,1), так как активная мощность мала, расходуется только на небольшие потери в статоре и небольшие механические потери, а реактивная мощность имеет постоянное значение, так как магнитный поток постоянный.
при холостом ходе имеет малое значение (примерно 0,1), так как активная мощность мала, расходуется только на небольшие потери в статоре и небольшие механические потери, а реактивная мощность имеет постоянное значение, так как магнитный поток постоянный.
С увеличением нагрузки активная мощность увеличивается, а реактивная мощность в пределах до номинальной нагрузки имеет неизменное значение. В результате увеличивается.
9. При схеме «звезда» работа электродвигателей является более плавной и мягкой.
При схеме «треугольник» электродвигатель работает на полную мощность.
Список литературы
1. И. П. Макарьева, Н. В. Чудогашева, К. В. Суслов «Электрические машины переменного тока: методические указания по выполнению лабораторных работ» - Иркутск: издательство ИрГТУ, 2002. 35с.
2. СТО 005-2015 СИСТЕМА МЕНЕДЖМЕНТА КАЧЕСТВА. Учебно-методическая деятельность. Оформление курсовых проектов (работ) и выпускных квалификационных работ технических специальностей. Введ. 19.05.15. Изд-во ИРНИТУ, 2015. 39с.
|
|
3. М. Ванюшин «Электроника и Электротехника для начинающих и не только…» - Санкт-Петербург: издательство НиТ, 2016г. 352с.