Асинхронный двигатель
Методические указания
к выполнению курсового проекта
Издательство
Пермского национального исследовательского
политехнического университета
Составители: М.И. Кузнецов, А.М. Костыгов
УДК 621.313.333.2(072.8)
А90
Рецензент
д-р техн. наук, профессор Н.М. Труфанова
(Пермский национальный исследовательский
политехнический университет)
| А90 |
Содержит необходимый перечень материалов для выполнения курсового проекта.
Предназначено для студентов, обучающихся по следующим специальностям и направлениям: 140211 «Электроснабжение», 140604 «Электропривод и автоматика промышленных установок
и технологических комплексов», 140600 «Электротехника, электромеханика и электротехнологии».
УДК 621.313.333.2(072.8)
© ПНИПУ, 2011
ВВЕДЕНИЕ
Техническое задание на учебное проектирование асинхронного двигателя содержит номинальные данные проектируемой машины
и указания о режиме ее работы, исполнении по способу монтажа, степени защиты от воздействия окружающей среды и системе охлаждения. Кроме того, могут быть заданы также дополнительные требования к проектируемому двигателю, например наименьшие допустимые значения кратности максимального и минимального моментов, а для двигателей с короткозамкнутыми роторами также предельные значения пускового тока и наименьшие значения пусковых моментов. В отношении требований, не оговоренных в задании, спроектированная машина должна удовлетворять соответствующим ГОСТам.
В начальной стадии проектирования при выборе главных размеров и электромагнитных нагрузок необходимо учесть дополнительные требования технического задания. Если проектируемая машина должна иметь большой максимальный момент, то индуктивное сопротивление ее обмоток не должно быть большим,
поэтому в такой машине нецелесообразно выбирать малое значение индукций, большую линейную нагрузку, узкие и глубокие пазы и т.п.
Требования к пусковым характеристикам с короткозамкнутым ротором следует обязательно учитывать при выборе конфигурации пазов ротора. Так, узкие и глубокие пазы с сужающейся верхней частью обеспечивают большое увеличение расчетного активного сопротивления ротора при пуске и большие пусковые моменты, но при таких пазах возрастает индуктивное сопротивление рассеяния обмотки ротора и уменьшаются перегрузочная способность двигателя и коэффициент мощности при номинальном режиме.
Полностью учесть все требования технического задания к характеристикам двигателя при выборе размеров магнитопровода
и обмотки машины, не ориентируясь на данные выпущенных машин, невозможно. Поэтому перед началом расчета следует детально изучить конструкцию базового двигателя, критически оценить принятые в ней соотношения размеров, уровни электромагнитных нагрузок и другие данные и лишь после этого приступить к расчету. Расчет асинхронных машин начинают с определения главных размеров: внутреннего диаметра статора D и расчетной длины магнитопровода l δ. Размеры D и l δ связаны с мощностью, угловой скоростью и электромагнитными нагрузками выражением машинной постоянной:
 (1)
(1)
В начале расчета двигателя все величины, входящие в выражение (1), кроме синхронной угловой скорости, неизвестны. Поэтому расчет проводят, задаваясь на основании имеющихся рекомендаций значениями электромагнитных нагрузок(А и В δ), коэффициентов(a δ, k δи k об), и приближенно определяют расчетную мощность P ¢. Остаются два неизвестных(D и l δ), однозначное определение которых без дополнительных условий невозможно. Таким условием является отношение l δ/ D или более употребительное в расчетной практике отношение λ = l δ/τ. Это отношение в значительной степени определяет экономические данные машин, а также оказывает влияние на характеристики и условия охлаждения двигателей.
У большинства выпускаемых асинхронных двигателей общего назначения отношение λ изменяется в достаточно узких пределах. Поэтому для определения D и l δ можно предварительно выбрать то или иное отношение λ, характерное для заданного исполнения
и числа полюсов машины. Это позволит однозначно определить главные размеры, исходя из выражения (1). Однако внутренний диаметр статора непосредственно связан определенными размерными соотношениями с внешним диаметром статора Da, в свою очередь, определяющим высоту оси вращения h, значение которой при проектировании новых двигателей может быть принято только из стандартного ряда высот, установленных ГОСТом.
Внешний диаметр статора должен также соответствовать определенным условиям, налагаемым требованиями раскроя листов электротехнической стали с наименьшими отходами при штамповке. С учетом этих требований при ручном расчете асинхронного двигателя более целесообразным является выбор главных размеров, основанный на предварительном определении высоты оси вращения, увязке этого размера с внешним диаметром статора и последующем расчете внутреннего диаметра статора D.
1. Выбор главных размеров
Высоту оси вращения предварительно определяют по рис. 1, а или б для заданных Р 2 и 2 p в зависимости от исполнения двигателя.
Из ряда высот осей вращения принимают ближайшее к предварительно найденному меньшему стандартному значению h. Следует иметь в виду, что ГОСТ определяет стандартные высоты осей вращения независимо от назначения и конструктивного исполнения асинхронных двигателей, поэтому высота оси вращения любого проектируемого двигателя должна быть равна одному из этих значений.
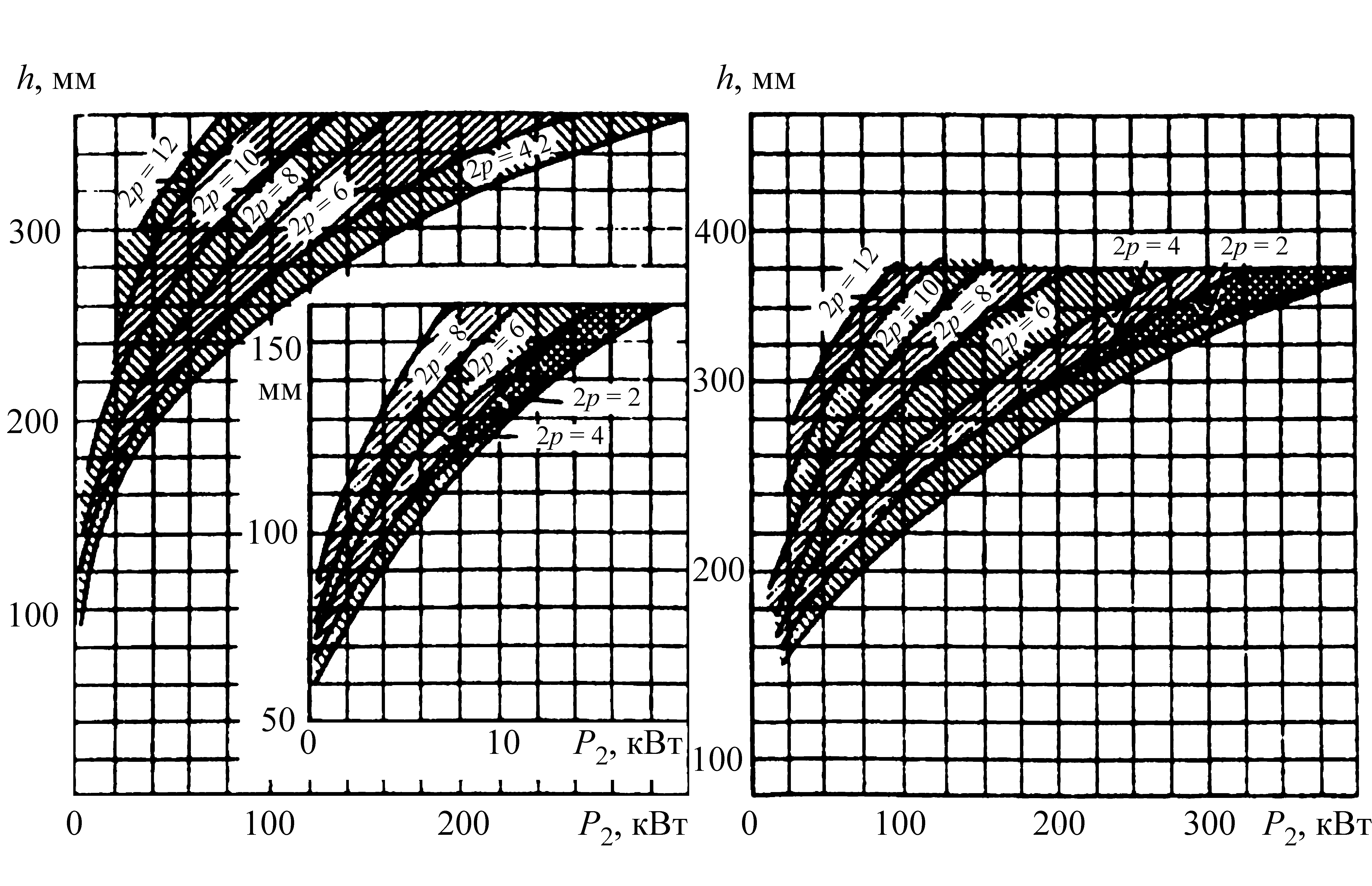
Рис. 1. Высота оси вращения h двигателей различных мощности и частоты вращения: а – со степенью защиты IP 44; б – со степенью защиты IP 23
1. Высота оси вращения (предварительно) выбирается по рис. 1. Принимаем ближайшее стандартное значение h; D a (табл. 1).
За высоту оси вращения принимается расстояние от оси вращения до опорной плоскости машины, измеренное в середине выступающего конца вала.
Номинальные значения высот оси вращения должны соответствовать ряду 40, 45, 50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400, 450, 500, 560, 630, 710, 800, 900
и 1000 мм.
Таблица 1
Внешние диаметры статоров асинхронных двигателей различных высот оси вращения
| Высота h, мм | Диаметр Da, мм | Высота h, мм | Диаметр Da, мм |
| 0,08–0,096 | 0,272–0,285 | ||
| 0,1–1,08 | 0,313–0,322 | ||
| 0,116–0,122 | 0,349–0,359 | ||
| 0,131–0,139 | 0,392–0,406 | ||
| 0,149–0,157 | 0,437–0,452 | ||
| 0,168–0,175 | 0,52–0,53 | ||
| 0,191–0,197 | 0,59 | ||
| 0,225–0,233 | 0,66 |
2. Внутренний диаметр статора D в общем случае можно определить по внешнему диаметру, высотам ярма(ha) и зубцов (hz) статора:
D = Da – 2 (ha + hz).
На данном этапе расчета размеры ha и hz неизвестны, поэтому для определения D используют эмпирические зависимости. При
одном и том же уровне индукции на участках магнитопровода
в машинах с одинаковым D высота ярма статора будет пропорциональна потоку, а следовательно, обратно пропорциональна числу полюсов машины (прямо пропорциональна полюсному делению). Принимая, что размеры пазов не зависят от числа полюсов машины, получаем приближенное выражение:
D = KDDa.
Значения коэффициентов KD, приведенные ниже, характеризуют отношения внутренних и внешних диаметров сердечников статоров асинхронных двигателей серий 4А и АИ при различных числах полюсов и могут быть использованы для предварительного определения D вновь проектируемой машины.
Отношение KD = D / Da, в асинхронных двигателях в зависимости от числа полюсов:
| 2 p | 10–12 | ||||
| KD | 0,52–0,6 | 0,62–0,68 | 0,7–0,72 | 0,72–0,75 | 0,75–0,77 |
3. Далее находят полюсное деление τ, м:
τ = π D /(2 p),τ
и расчетную мощность P ',В·А:
P' = mIE = P 2 
где Р 2 – мощность на валу двигателя, Вт; kE – отношение ЭДС обмотки статора к номинальному напряжению, которое может быть приближенно определено по рис. 2.
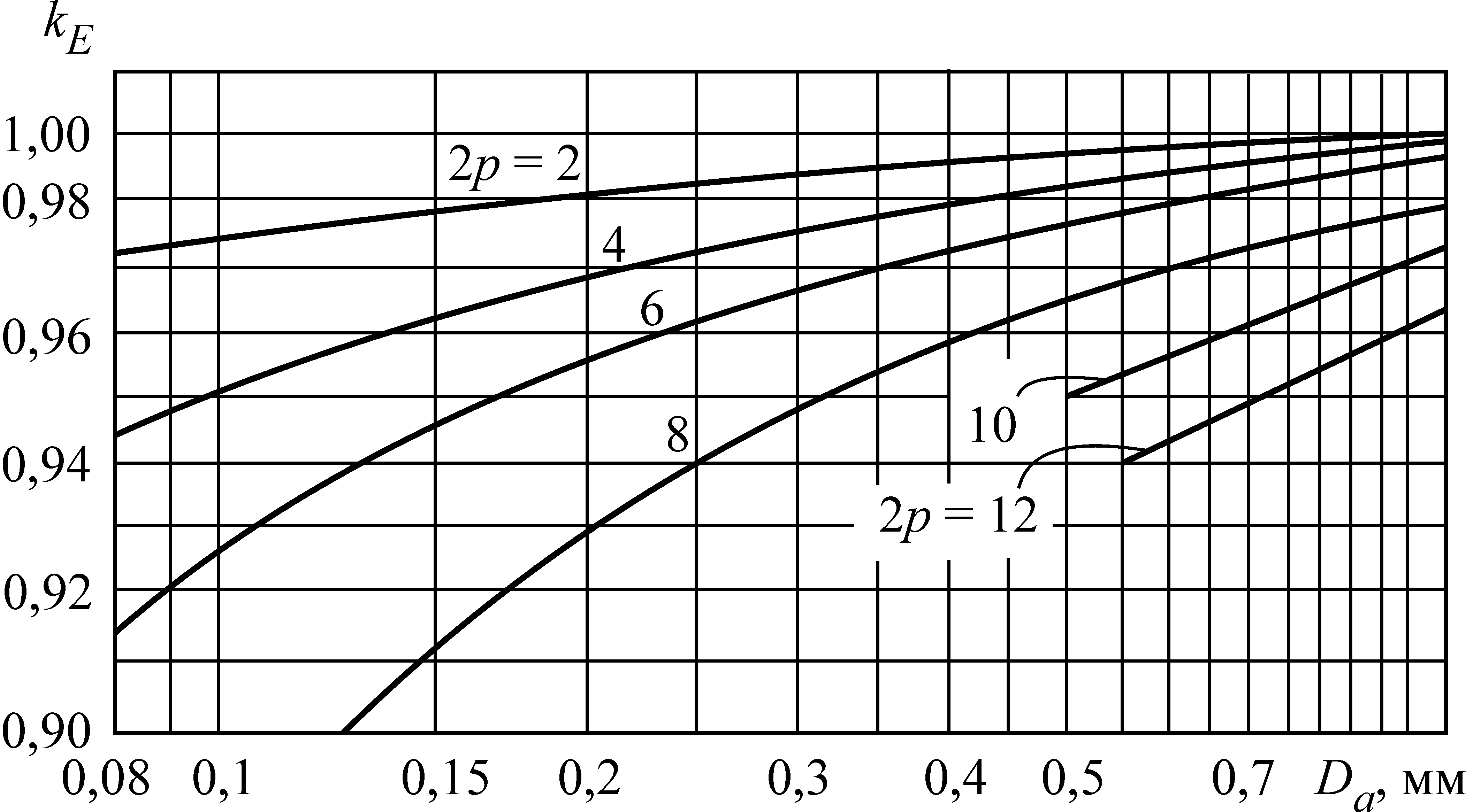
Рис. 2. Значения коэффициента kE
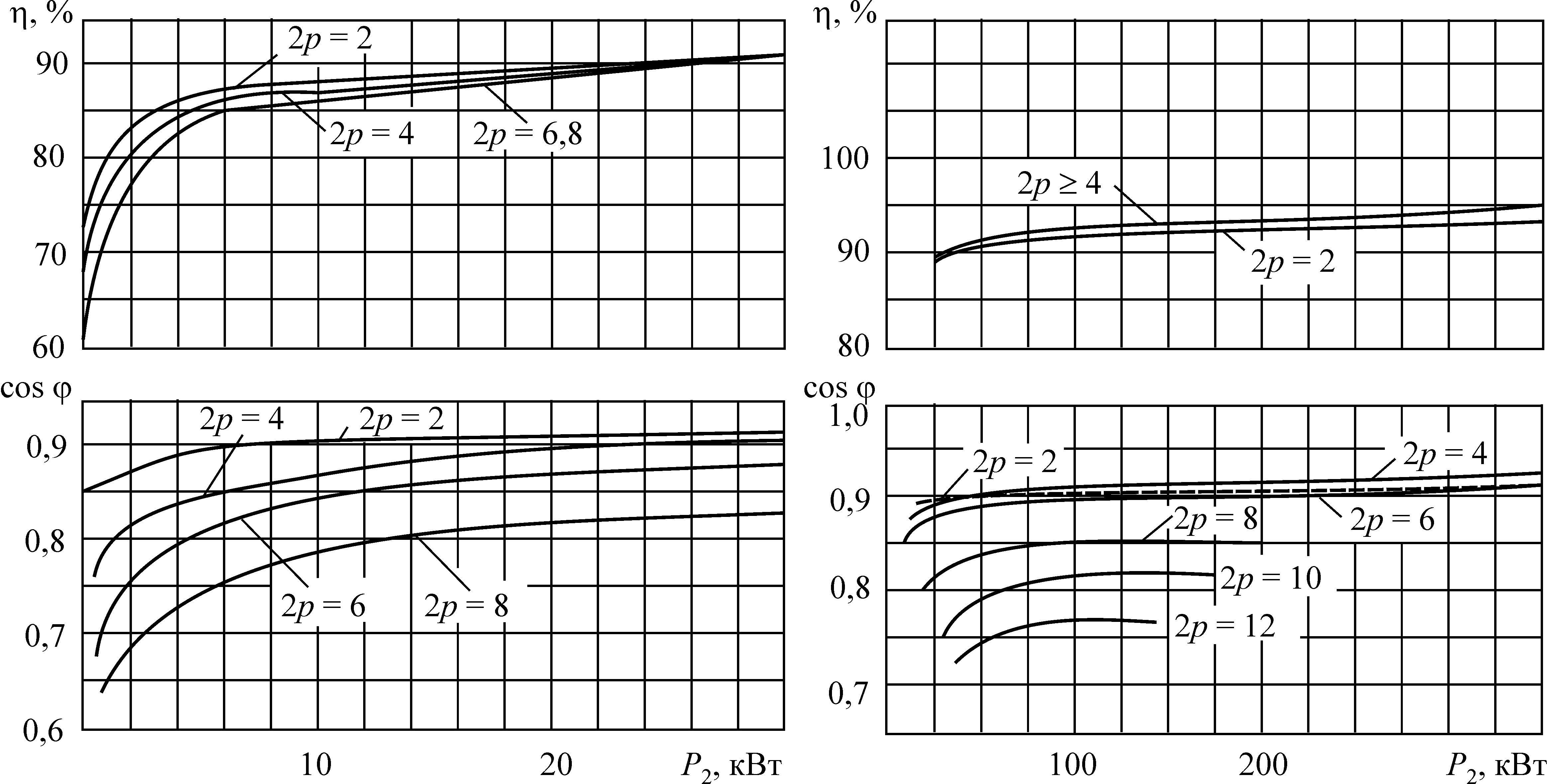
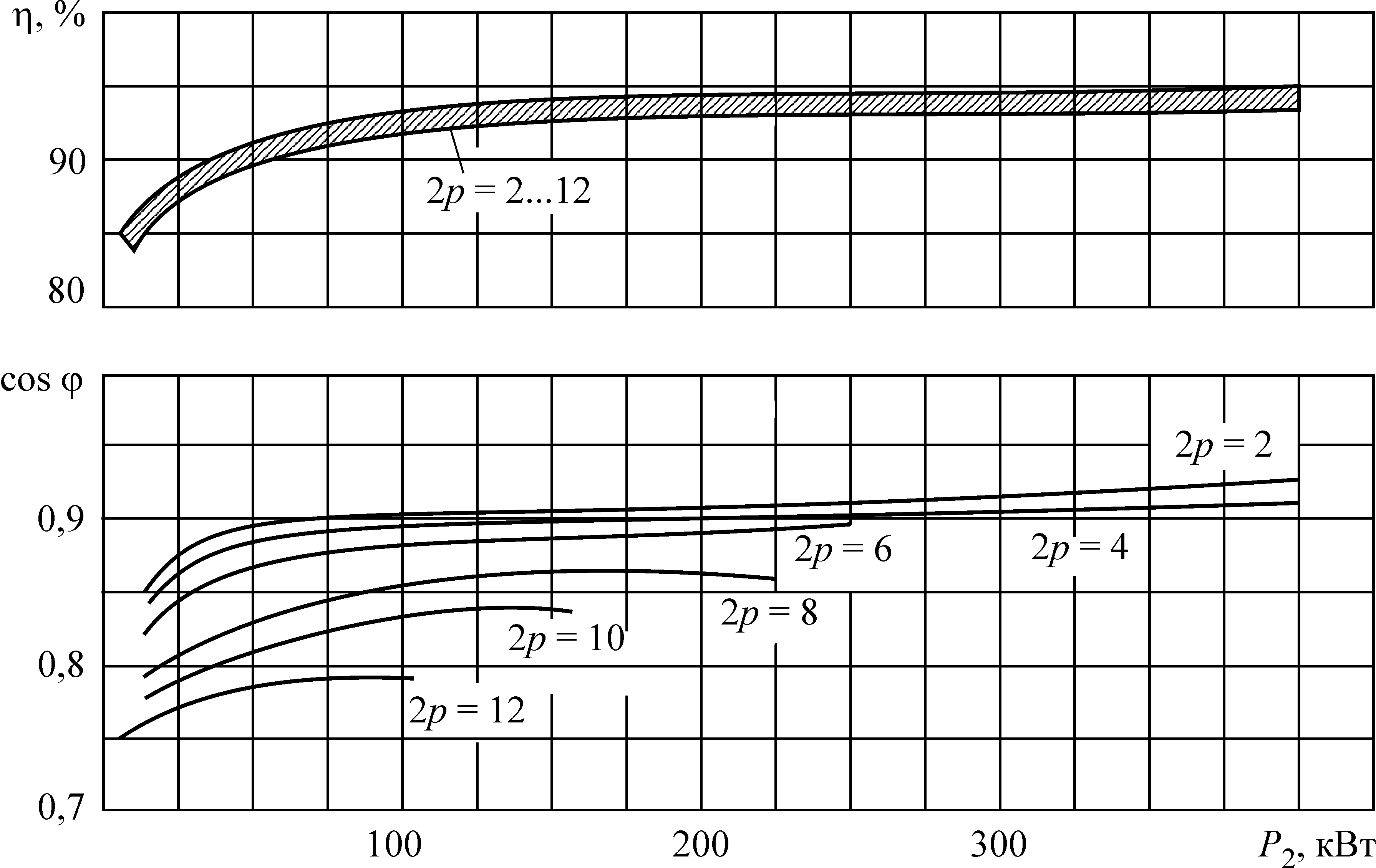
4. Предварительные значения η и cos φ, если они не указаны
в задании на проектирование, находятся по ГОСТу. Приближенные значения η и cos φ могут быть приняты по кривым рис. 3.
а б
в
Рис. 3. Примерные значения КПД и cos j асинхронных двигателей: а – со степенью защиты IP 44 и мощностью до 30 кВт; б – со степенью защиты
IP 44 и мощностью до 400 кВт; в – со степенью защиты IP 23
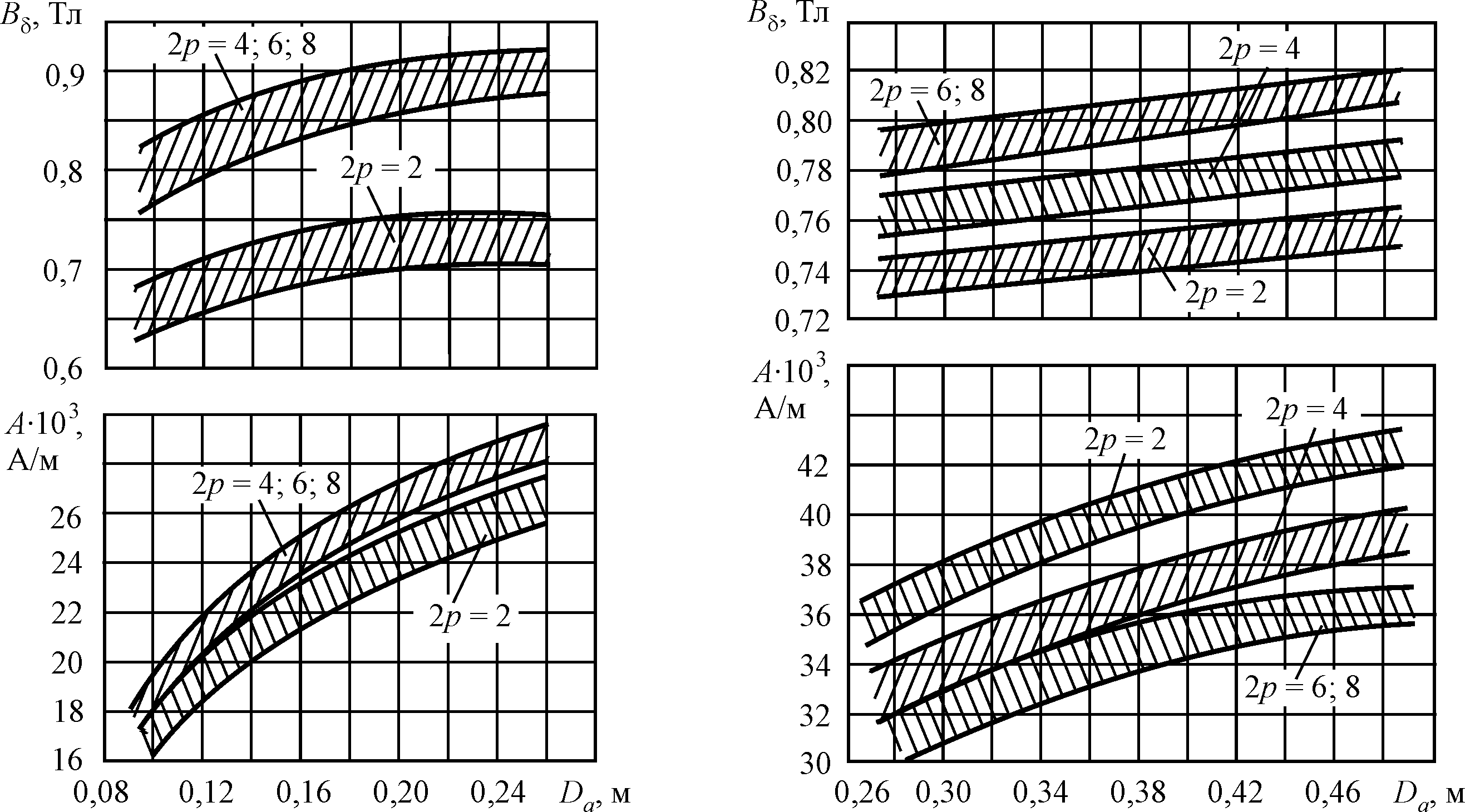
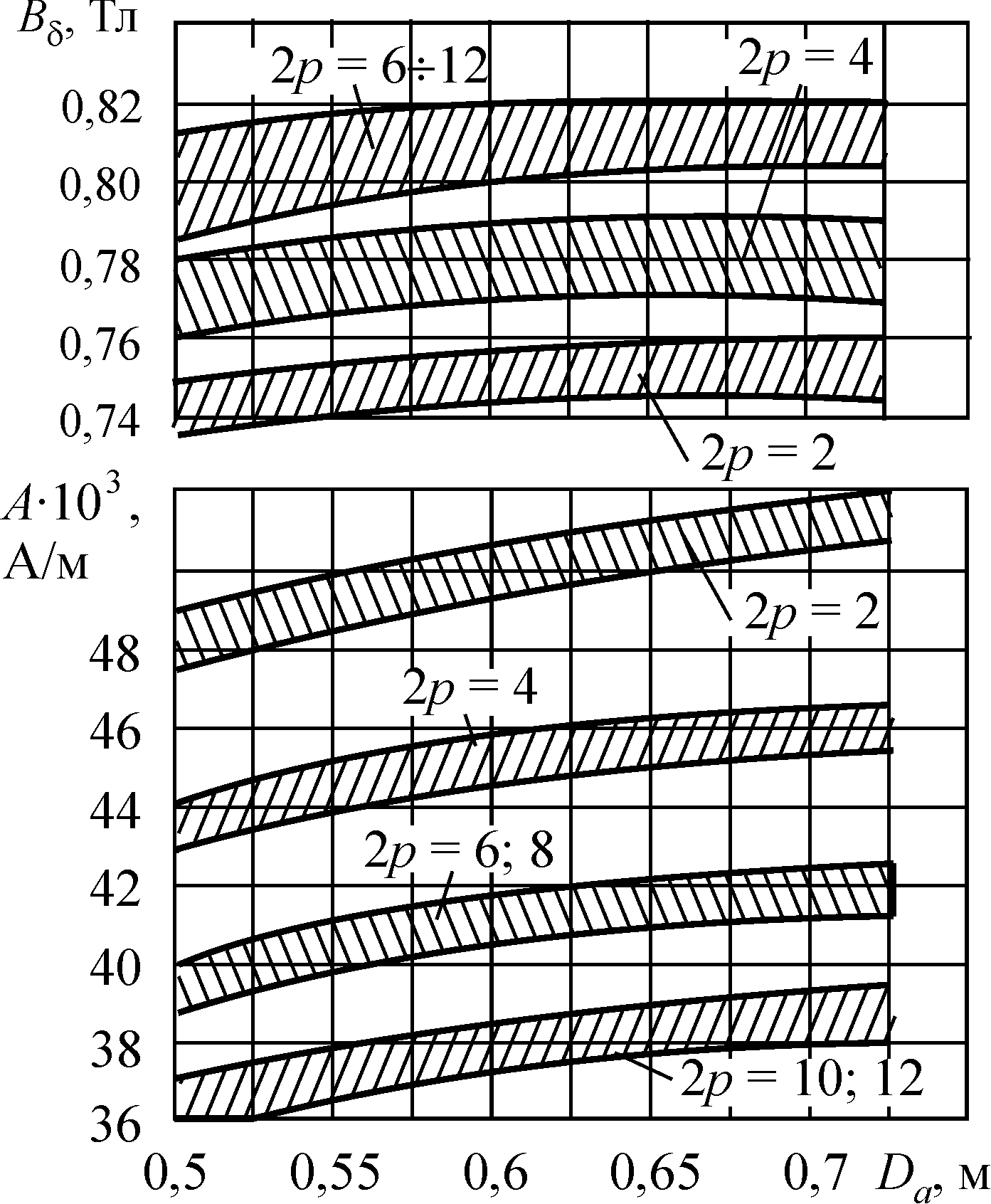
5. Электромагнитные нагрузки (предварительно) определяются по рис. 4. А =, А/м; В δ =, Тл.
 а б
а б
в
Рис. 4. Электромагнитные нагрузки асинхронных двигателей со степенью защиты IP 44 при высоте оси вращения: a – h ≥132 мм; б – h = 150...250 мм;
в – h ≥ 280 мм (с продуваемым ротором)
Предварительный выбор электромагнитных нагрузок А (А/м), В δ (Тл) должен быть проведен особо тщательно, так как они определяют не только расчетную длину сердечника, но и в значительной степени характеристики машины. При этом если главные размеры машины зависят от произведения АВ δ(п. 1), то на характеристики двигателя оказывает существенное влияние также и соотношение между этими величинами. Рекомендации по выбору А и В δ представлены в виде кривых на рис. 4 для машин различных мощности
и исполнения. На каждом из рисунков даются области их допустимых значений. При выборе конкретных значений А и В δ в пределах рекомендуемой области следует, руководствуясь приведенными выше замечаниями, учитывать требования технического задания
к характеристикам проектируемого двигателя.
а б
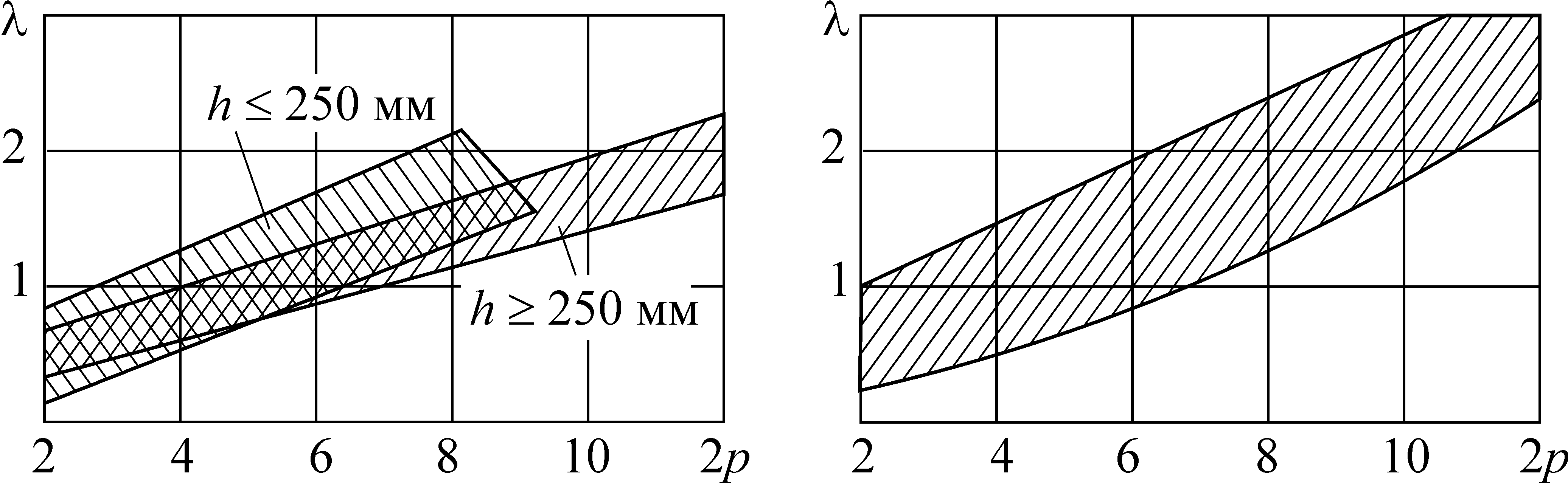
Рис. 5. Отношение l =  у двигателей исполнения по степени защиты:
у двигателей исполнения по степени защиты:
а – IP 44; б – IP 23
Коэффициент полюсного перекрытия а δ и коэффициент формы поля kв в асинхронных машинах определяются степенью уплощения кривой поля в зазоре, возникающей при насыщении зубцов статора и ротора, и могут быть достаточно достоверно определены только после расчета магнитной цепи. Поэтому для расчета магнитной цепи удобнее рассматривать синусоидальное поле, а влияние уплощения учесть при расчете магнитного напряжения отдельных участков магнитной цепи. Основываясь на этом, значения коэффициентов предварительно принимают следующими:
а δ = 2/π ≈ 0,64; kв =  = 1,11.
= 1,11.
Предварительное значение обмоточного коэффициента k об1 выбирают в зависимости от типа обмотки статора. Для однослойных обмоток k об1 = 0,95...0,96. Для двухслойных и одно-двухслойных обмоток при2 р = 2 следует принимать k об1 = 0,90...0,91 и при большей полюсности k об1 = 0,91...0,92.
Синхронная угловая частота двигателя Ω, рад/с, рассчитывается по формуле
 или
или 
где n 1 – синхронная частота вращения, об/мин; f 1 – частота питания, Гц.
6. Расчетная длина магнитопровода, м,
(Ω = 2p f 1/ p, рад/с].
7. Отношение λ = l δ/τ. Значение λ проверить на допустимость пределов.
Критерием правильности выбора главных размеров D и l δ служит отношение λ = l δ /τ, которое обычно находится в пределах, показанных на рис. 5 для принятого исполнения машины. Если λ оказывается чрезмерно большим, то следует повторить расчет для ближайшей из стандартного ряда большей высоты оси вращения h. Если λ слишком мало, то расчет повторяют для следующей в стандартном ряду меньшей высоты h.
На этом выбор главных размеров заканчивается. В результате проделанных вычислений получены значения высоты оси вращения h, внутреннего диаметра статора D, внешнего диаметра статора Da, расчетной длины магнитопровода l δ и полюсного деления τ.
Следующий этап расчета включает определение числа пазов статора Z 1 и числа витков в фазе обмотки статора w 1. При этом число витков фазы обмотки статора должно быть таким, чтобы линейная нагрузка двигателя и индукция в воздушном зазоре как можно более близко совпадали с их значениями, принятыми предварительно при выборе главных размеров, а число пазов статора обеспечивало достаточно равномерное распределение катушек обмотки.
Чтобы выполнить эти условия, вначале выбирают предварительно зубцовое деление tz 1, в зависимости от типа обмотки, номинального напряжения и полюсного деления машины.
Значения зубцовых делений статора асинхронных двигателей
с обмоткой из круглого провода, необходимые для предварительного выбора числа пазов, приведены на рис. 6. Меньшие значения
в каждой из показанных на рисунке областей возможных значений tz 1характерны для машин меньшей мощности для каждого из диапазонов высот осей вращения. Следует отметить, что двигатели с h ≥ 280 мм обычно выполняют с обмоткой из прямоугольного провода.
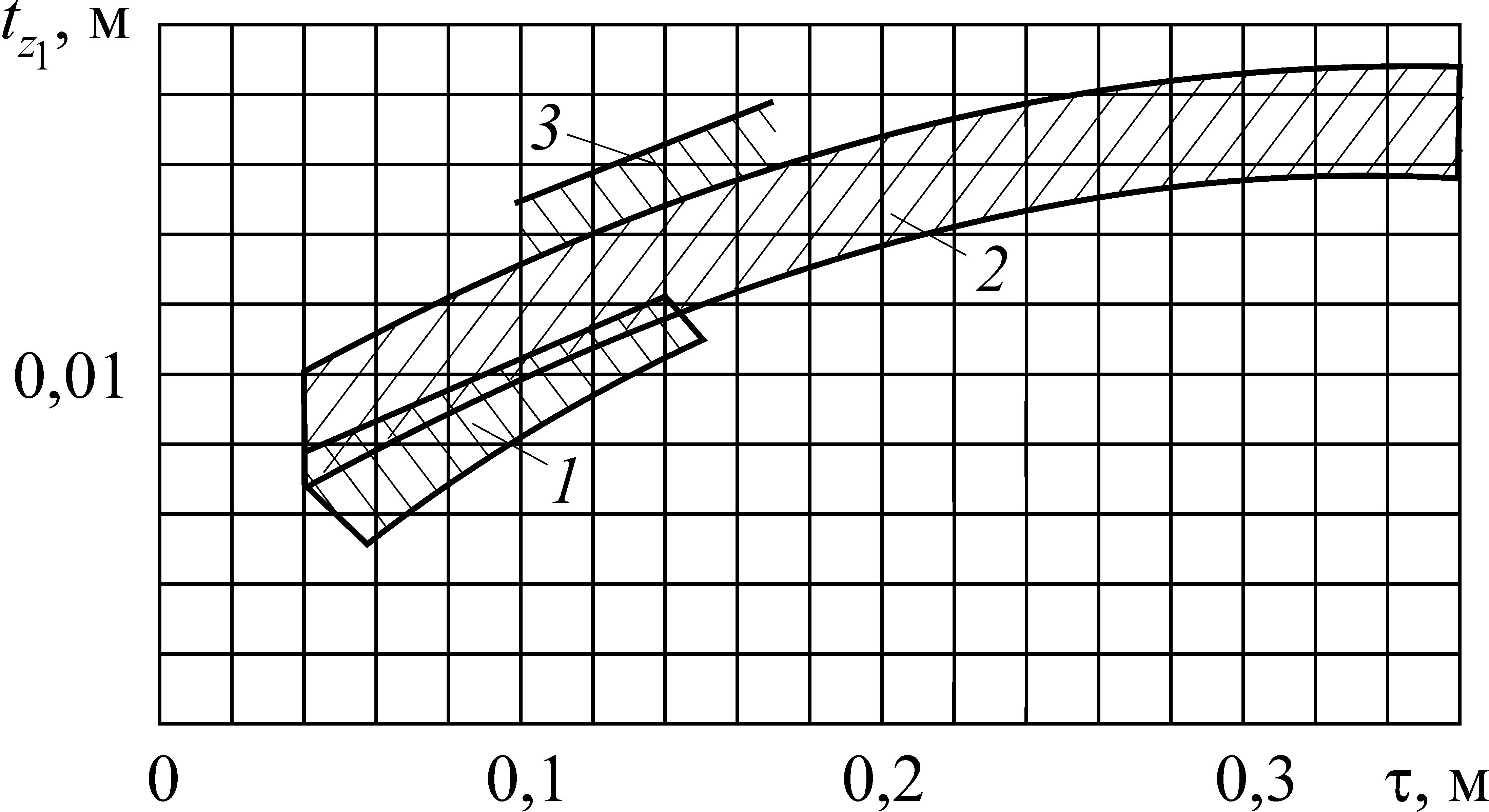
Рис. 6. Зубцовые деления статоров асинхронных двигателей с обмоткой из круглого провода с высотами оси вращения: 1 – h < 90 мм; 2 – 90 < h < 250 мм;
3 – h < 280 мм
8. Число пазов статора:
Z 1min = 
Z 2max = 
Принимаем Z 1, тогда q 1 = Z 1/(2 pm).
Окончательное число пазов статора Z 1 следует выбирать в полученных пределах с учетом условий, налагаемые требованиями симметрии обмотки, и желательного для проектируемой машины значения числа пазов на полюс и фазу q 1. Число пазов статора в любой обмотке асинхронных машин должно быть кратно числу фаз,
а число q 1 = Z 1/(2 pm)в большинстве асинхронных машин должно быть целым.
9. Зубцовое деление статора (окончательно), м,
10. Число эффективных проводников в пазу (предварительно, при условии а = 1)
Номинальный ток статора – I 1ном.
 .
.
Принимаем а = 1, тогда u п = аu'п проводников.
11. Окончательные значения:
число витков в фазе
 .
.
12. Линейная нагрузка, А/м,
 .
.
13. Магнитный поток, Вб,
Ф = 
где  при этом
при этом 
Для различных q определяется k p по табл. 2.
Таблица 2
| q | ||||||||
| k p | 0,966 | 0,960 | 0,958 | 0,957 | 0,957 | 0,957 | 0,956 |
14. Индукция в воздушном зазоре, Тл,
В δ =  .
.
Значения А и В δ находятся в допустимых пределах.
15. Плотность тока в обмотке статора.
Нагрев пазовой части обмотки зависит от произведения линейной нагрузки на плотность тока (AJ).
Поэтому выбор допустимой плотности тока производят с учетом линейной нагрузки двигателя, А/м2:
Значения (AJ) для асинхронных двигателей различных исполнений и мощности приведены на рис. 7.
а г
б д
в е
Рис. 7. Средние значения произведения АJ асинхронных двигателей со степенью защиты: а – IP 44, h = £ 132 мм; б – IP 44, h = 160...250 мм; в – IP 44, h = 280...355 мм (при продуваемом роторе); г – IP 23, h = 160...250 мм;
д – IP 23, h = 280...355 мм; е – IP 23, при U ном = 6000 В
16. Площадь поперечного сечения эффективного проводника (предварительно), м2, а = 1:
Сечение эффективного проводника (окончательно), мм2: принимаем n эл, тогда  Принимаем обмоточный провод марки ПЭТВ, q э.ср = n эл q эл (табл. П1, см. приложение).
Принимаем обмоточный провод марки ПЭТВ, q э.ср = n эл q эл (табл. П1, см. приложение).
Плотность тока в обмотке статора (окончательно), А/мм2,
Расчет размеров зубцовой зоны статора
и воздушного зазора
17. Паз и зубец статора определяем по рис. 8с соотношением размеров, обеспечивающих параллельность боковых граней зубцов.
а
Рис. 8. К расчету размеров зубцовой зоны статоров с обмоткой из круглого провода: а – в – различные конфигурации пазов
б в
Рис. 8. Окончание
18. Принимаем предварительно по табл. 3 значения Вz 1; Ва.
19. Размеры паза, мм,
По выбранному значению индукций Ва определяется высота ярма статора, мм,
Размеры паза в штампе: b ш, h ш, мм.

Таблица 3
Допустимые значения индукции на различных участках магнитной цепи, Тл
| Участок магнитной цепи | Обозначение | Исполнение IР 44 при числе полюсов 2 р | Исполнение IP 23 при числе полюсов 2 р | |||||||||
| 10 и 12 | ||||||||||||
| Ярмо статора | Ва | 1,4–1,6 | 1,15–1,35 | 1,1–1,2 | 1,45–1,6 | 1,2–1,4 | 1,1–1,3 | |||||
| Зубцы статора при постоянном сечении (обмотка из круглого провода) | Bz 1 | 1,6–1,9 | 1,6–1,8 | 1,8–2,05 | 1,7–1,95 | 1,6–1,9 | ||||||
| Зубцы статора при наиболее узком сечении: | ||||||||||||
| при полуоткрытых пазах | Bz 1max | 1,75–1,95 | 1,9–2,1 | 1,8–2 | ||||||||
| при открытых пазах | Bz 1max | 1,6–1,9 | 1,7–2 | |||||||||
| Ярмо ротора: | ||||||||||||
| короткозамкнутого | Bj | £1,45 | £1,4 | £1,2 | £1 | £1,55 | £1,5 | £1,3 | £1,1 | |||
| фазного | Bj | £1,3 | £1,15 | £0,9 | £1,4 | £1,2 | £1 |

Окончание табл. 3
| Участок магнитной цепи | Обозначение | Исполнение IР 44 при числе полюсов 2 р | Исполнение IP 23 при числе полюсов 2 р | |||||||||
| 10 и 12 | ||||||||||||
| Зубцы ротора при постоянном сечении (трапецеидальные пазы) | Bz 2 | 1,7–1,95 | 1,75–2 | |||||||||
| Зубцы ротора в наиболее узком сечении: | ||||||||||||
| короткозамкнутого | Bz 2max | 1,5–1,7 | 1,6–1,9 | 1,75–2 | 1,7–1,95 | |||||||
| фазного | Bz 2max | 1,75–2,15 | 1,7–1,95 | 1,9–2,2 | 1,85–2,1 |
Форма паза и зубца статора показана на рис. 8, а (мм).

где Δ b п и Δ h п определяются по табл. П15, б.
Площадь поперечного сечения паза для размещения проводников обмотки, мм2,
при этом площадь поперечного сечения прокладок S пр = 0; площадь поперечного сечения корпусной изоляции в пазу

гдe b из – односторонняя толщина изоляции в пазу, мм (рис. П15, а).
20. Коэффициент заполнения паза
Коэффициент заполнения паза должен находиться в пределах k 3 = = 0,69...0,71 для двигателей с 2 p = 2 и k 3 = 0,72...0,74 для двигателей
с2 р ≥ 4.
Если полученное значение ниже указанных пределов, то площадь паза следует уменьшить за счет увеличения h a или bz либо обоих размеров одновременно в зависимости от принятого при их расчете значения индукции. Индукция в зубцах и ярме статора при этом уменьшится. Уменьшение индукции ниже пределов, указанных в табл. 3, показывает, что главные размеры двигателя завышены и активная сталь недоиспользована. В этом случае следует уменьшить длину сердечника или перейти на ближайшую меньшую высоту оси вращения.
Выбор воздушного зазора
Правильный выбор воздушного зазора во многом определяет энергетические показатели асинхронного двигателя. Чем меньше воздушный зазор, тем меньше его магнитное сопротивление и магнитное напряжение, составляющее основную часть МДС магнитной цепи всей машины. Поэтому уменьшение зазора приводит к соответственному уменьшению МДС магнитной цепи и намагничивающего тока двигателя, благодаря чему возрастает его cos φ и уменьшаются потери в меди обмотки статора. Но чрезмерное уменьшение приводит к возрастанию амплитуды пульсаций индукции в воздушном зазоре и, как следствие, к увеличению поверхностных и пульсационных потерь. Поэтому КПД двигателей с очень малыми зазорами не улучшается, а часто даже становится меньше.
В современных асинхронных двигателях зазор выбирают, исходя из минимума суммарных потерь. Так как при увеличении зазора потери в меди возрастают, а поверхностные и пульсационные уменьшаются, то существует оптимальное соотношение между параметрами, при котором сумма потерь будет наименьшей. Такие расчеты проводят на ЭВМ по оптимизационным программам. При учебном проектировании воздушный зазор следует выбирать, руководствуясь данными выпускаемых двигателей (рис. 9) либо следующими приближенными формулами.
Для двигателей мощностью менее 20 кВт воздушный зазор, м:
– при2 р = 2 δ ≈ (0,3 + 1,5 D) ∙ 10–3;
– при2 р > 4 δ ≈ (0,25 + D) ∙ 10–3.
Для двигателей средней и большой мощности
Либо выбор воздушного зазора производится по рис. 9. Окончательно принимаем величину воздушного зазора δ.
Рис. 9. К выбору воздушного зазора асинхронных двигателей
21. Расчет ротора.
Рекомендации по выбору Z 2 при известных Z 1 и 2 p сведены
в табл. 4.
Таблица 4
Рекомендуемые числа пазов роторов асинхронных двигателей
с короткозамкнутым ротором
| 2 р | Число пазов статора | Число пазов ротора | |
| без скоса пазов | со скосом пазов | ||
| 9*, 15* | – | ||
| 11*, 12*, 15*, 21*, 22 | 14*, (18), 19*, 22*, 26, 28*, (30), 31, 33, 34, 35 | ||
| 15* (16)*, 17*, 19, 32 | 18, 20, 26, 31, 33, 34, 35 | ||
| 22, 38 | (18), 20, 21,23, 24, 37, 39, 40 25, 27, 29, 43 | ||
| 26, 28, 44, 46 | 25, 27, 29, 43, 45, 47 | ||
| 32, 33, 34, 50, 52 | – | ||
| 38, 40, 56, 58 | 37, 39, 41, 55, 57, 59 |
Окончание табл. 4
| 2 р | Число пазов статора | Число пазов ротора | |
| без скоса пазов | со скосом пазов | ||
| 9* | 15* | ||
| 10*, 14* | 18*, 22* | ||
| 15*, 16*, 17, (32) | 16, 18, (20), 30, 33, 34, 35, 36 | ||
| 26, 44, 46 | (24), 27, 28, 30, (32), 34, 45, 48 | ||
| (34), (50), 52, 54 | (33), 34, (38), (51), 53 | ||
| 34, 38, 56, 58, 62, 64 | (36), (38), (39), 40, (44), 57, 59 | ||
| 50, 52, 68, 70, 74 | 48, 49, 51, 56, 64, 69, 71 | ||
| 62, 64, 80, 82, 86 | 61, 63, 68, 76, 81, 83 | ||
| 26, 46, (48) | 28*, 33, 47, 49, 50 | ||
| 44, 50, 64, 66, 68 | 42, 43, 51, 65, 67 | ||
| 56, 58, 62, 82, 84, 86, 88 | 57, 59, 60, 61, 83, 85, 87, 90 | ||
| 74, 76, 78, 80, 100, 102, 104 | 75, 77, 79, 101, 103, 105 | ||
| (34), 36, 44, 62, 64 | 35, 44, 61, 63, 65 | ||
| 56, 58, 86, 88, 90 | 56, 57, 59, 85, 87, 89 | ||
| 66, (68), 70, 98, 100, 102, 104 | (68), (69), (71), (97), (99), (101) | ||
| 78, 82, 110, 112, 114 | 79, 80, 81, 83, 109, 111, 113 | ||
| 44, 46, 74, 76 | 57, 69, 77, 78, 79 | ||
| 68, 72, 74, 76, 104, 106, 108, 110, 112, 114 | 70, 71, 73, 87, 93, 107, 109 | ||
| 86, 88, 92, 94, 96, 98, 102, 104, 106, 134, 136, 138, 140, 142, 146 | 99, 101, 103, 117, 123, 137, 139 | ||
| 56, 64, 80, 88 | 69, 75, 80, 89, 91, 92 | ||
| 68, 70, 74, 88, 98, 106, 108, 110 | (71), (73), 86, 87, 93, 94, (107), (109) | ||
| 86, 88, 92, 100, 116, 124, 128, 130, 132 | 84, 89, 91, 104, 105, 111, 112, 125, 127 | ||
| 124, 128, 136, 152, 160, 164, 166, 168, 170, 172 | 125, 127, 141, 147, 161, 163 |
22. Внешний диаметр ротора, м,
D 2 = D – 2δ.
23. Длина магнитопровода ротора, м,
l 2 = l 1.
24. Зубцовое деление ротора, мм,
tz 2 = π D 2/ Z 2.
25. Внутренний диаметр ротора равен диаметру вала, так как сердечник ротора непосредственно насаживается на вал;
Dj = DB = kBDa, мм, коэффициент kB определяется по табл. 5.
Таблица 5
Значения коэффициента kB
| h, мм | 50...63 | 71...250 | 280...355 | 400...500 | ||||
| 2p | 2...6 | 2...8 | 4...12 | 8...12 | ||||
| kB | 0,19 | 0,23 | 0,22 | 0,23 | 0,2 | 0,23 | 0,25 | |
26. Ток в обмотке ротора, А,
I 2 = kiI 1 vi,
где ki = 0,2 + 0,8 cos φ;

(пазы ротора выполняем без скоса – k ск = 1).
27. Площадь поперечного сечения стержня (предварительно), мм2,
q п = 
(плотность тока в стержне литой клетки принимаем J 2 = 2,5·106 А/м2).
28. Паз ротора определяем по рис. 10. Принимаем b ш, мм;
h ш, мм; h 'ш, мм.
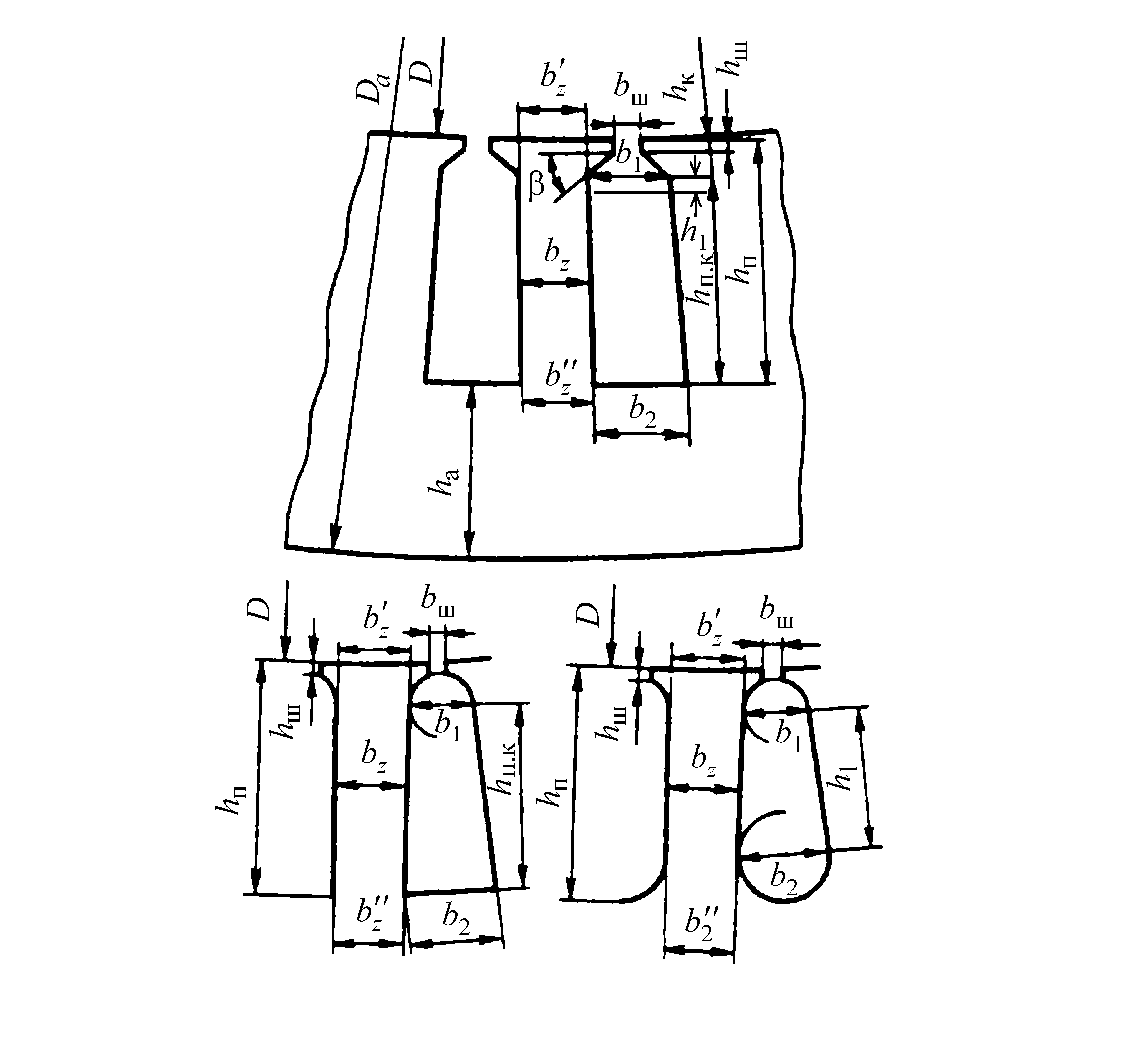
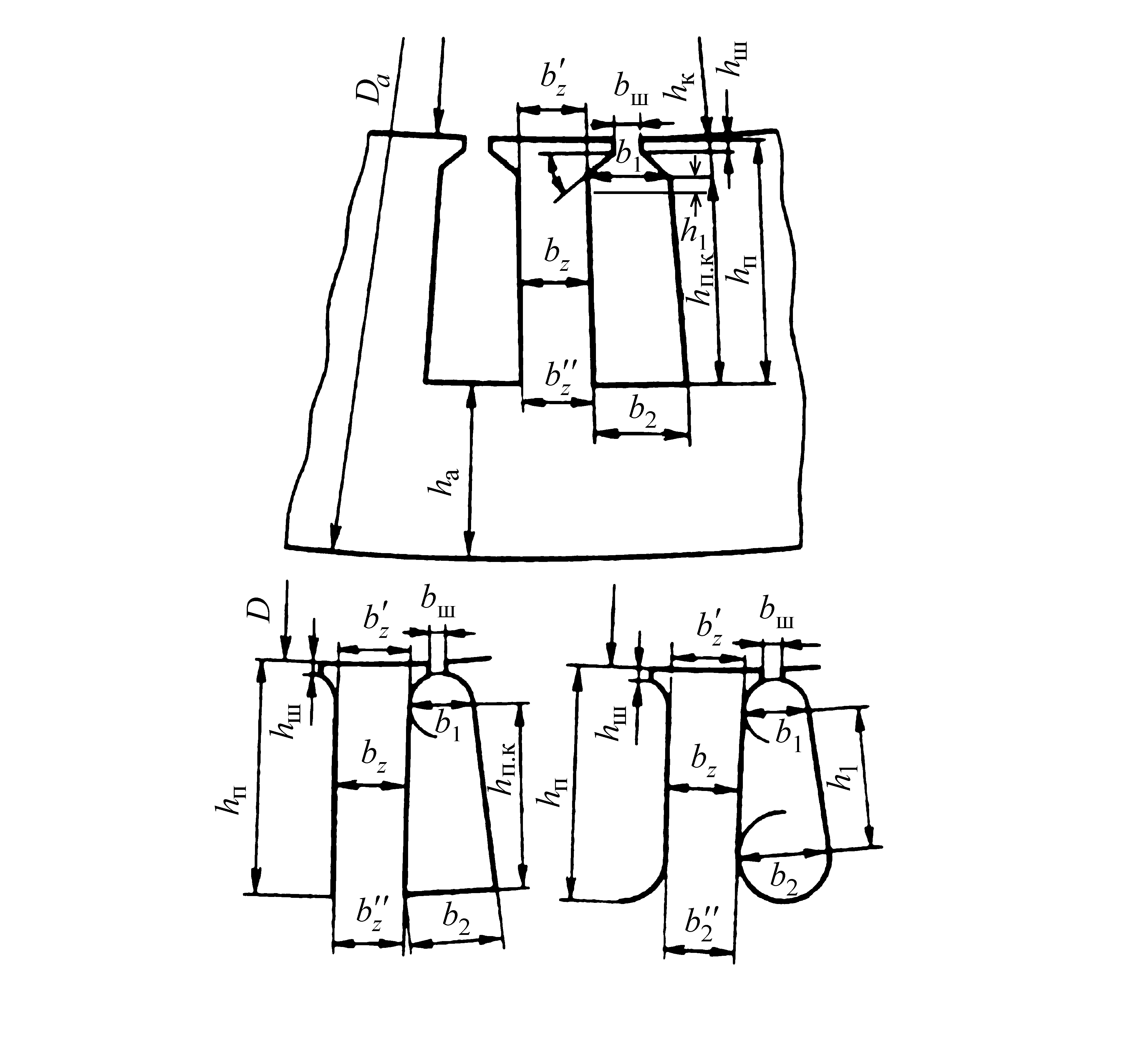
а б
Рис. 10. Трапецеидальные пазы короткозамкнутого ротора:
а – полузакрытые; б – закрытые
Принимаем b ш = 1,5 мм, h ш = 0,7 мм, h 'ш = 0,3 мм.
Допустимая ширина зубца, мм,
(принимаем Вz 2 = 1,8 Тл по табл. 3)
Размеры паза, мм (см. рис. 10):
 ;
;
 ;
;
 .
.
29. Уточняем ширину зубцов ротора по формулам табл. 6.
 Таблица 6
Таблица 6
Размеры зубцов фазных и короткозамкнутых одноклеточных
роторов с прямоугольными и трапецеидальными пазами
| Размер | Форма пазов ротора | ||||
| Фазный ротор | Короткозамкнутый ротор | ||||
| 9,32а* | 9,32б* | 10 (а, б); 9,40* | 9,41* | ||
| bz max | 
| 
| – | 
| |
| bz min | 
| – | 
| ||
| bz 1/3 | 
| – | 
| ||
| hz | – | – | h п – 0,1 b 2 | h п – 0,1 b 2 | |
| b ' z | – | – | 
| – | |
| b '' z | – | – |
| – | |
* Проектирование электрических машин / под ред. И.П. Копылова. М.: Высшая школа, 2002.
30. По допустимой индукции Вz 2(см. табл. 3) определяют ширину зубца ротора (см. рис. 10)
после чего рассчитывают размеры паза
b 1 =  ,
,
 ,
,
 .
.
Полная высота паза, мм,
 .
.
31. Площадь поперечного сечения стержня
 .
.
Плотность тока в стержне, А/м,
J 2 = 
32. Короткозамыкающие кольца (рис. 11, б). Площадь поперечного сечения кольца
а б
Рис. 11. Размеры замыкающих колец короткозамкнутого ротора:
а – со сварной обмоткой; б – с литой обмоткой
33. Основные размеры кольца.
Площадь поперечного сечения кольца, мм2
где 
J кл = 0,85 J 2.
Размеры короткозамыкающих колец:
h кл = 1,25 h п2;
b кл = 
D к.ср = D 2 – h кл.
2. Расчет магнитной цепи
Магнитопровод из электротехнической стали; толщина листов 0,5 мм.
34. Магнитное напряжение воздушного зазора, А,
F δ =  В δδ k δ,
В δδ k δ,
где k δ = 
Марку электротехнической стали рекомендуется выбирать
в зависимости от высоты вращения проектируемого асинхронного двигателя (табл. 7).
Таблица 7
| Марка стали | |||||
| Высота вращения h, мм | 45–250 | 150–250 | 71–250 | 280–355 | 280–560 |
Зависимость H = f (B) различных марок стали представлены
в приложении П.5–П.13.
35. Магнитное напряжение зубцовой зоны статора, А,
Fz 1 = 2 hz 1 Hz 1,
где hz 1 = h п1.
Расчетная индукция в зубцах, Тл,
(k c1 находится по табл. 8). Так как  > 1,8 Тл, необходимо учесть ответвление потока в паз и найти действительную индукцию в зубце Вz 1. Коэффициент k ПХ по высоте hzх = 0,5 hz.
> 1,8 Тл, необходимо учесть ответвление потока в паз и найти действительную индукцию в зубце Вz 1. Коэффициент k ПХ по высоте hzх = 0,5 hz.
Таблица 8
Способы изолирования листов электротехнической стали
и коэффициенты заполнения сталью магнитопроводов статора
и ротора с номинальным н