Лекция 12
План
Программируемые интерфейсные БИС. Организация обмена данными с внешними устройствами в параллельном коде. Программируемый параллельный интерфейс. Структура микросхемы. Сигналы квитирования приводе и выводе. Режимы работы. Программирование микросхемы.
Интерфейсные бис в составе МП – комплекта кр580
Интерфейс в МП–системе это совокупность системных шин и специальных микросхем, которые обеспечивают процессы обмена информацией во всех режимах работы системы. В состав комплекта КР580 входит значительное количество различных интерфейсных БИС (порядка 15), с помощью которых можно строить разнообразные МПС.
Основные БИС:
- генератор синхроимпульсов КР580ГФ24
- системный контроллер КР580ВК28
- программируемый контроллер параллельного ввода-вывода КР580ВВ55
- программируемый контроллер ПДП КР580ВТ57
- программируемый контроллер прерывания КР580ВН59
Эти контроллеры могут использоваться также с другими моделями микропроцессоров семейства х86, а также с МП1816.
- Системный контроллер кр580вк28. Системный контроллер предназначен для:
- формирования системной шины данных;
- хранения слова состояния процессора в течение машинного цикла;
- формирования СШУ и выдачи управляющих сигналов в соответствии с типом выполняемого машинного цикла.
На рис. 4.10 изображена структурная схема КР580ВК28 и его подключение к МП.
Логическая схема «Форм. УС» в зависимости от типа МЦ выдает на СШУ различные сигналы:
-входной сигнал WR (запись-чтение ОЗУ) на выходе разделяется на WR (запись в ОЗУ) и RD (чтение из ОЗУ);
-входной сигнал WRIO (запись-чтение ВУ) на выходе разделяется на WRIO (запись ВУ) и RDIO (чтение ВУ);
-при поступлении от процессора сигнала HLDA (разрешение режима ПДП) все разряды СШУ устанавливаются в 3-е состояние, так как управление этими шинами передается контроллеру ПДП.
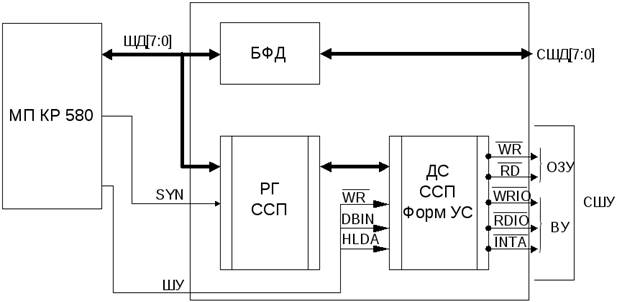
Рис. 4.10. Структурная схема системного контроллера
На рис. 4.11 представлено условное графическое обозначение (УГО) системного контроллера.
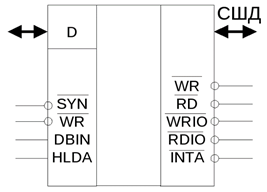
Рис. 4.11. УГО контроллера КР580ВК28
Программируемый контроллер ввода-вывода кр580вв55
Предназначен для управления обменом данными между процессором и внешним устройством в программном режиме. Контроллер называется программируемым, так как перед началом работы он программируется процессором. Структурная схема изображена на рис. 4.12.
В таблице 4.3 представлены режимы обмена данными в МПС.
Таблица 4.3
| Операции | Канал | Сигналы | ||||

| 
| 
| A1 | A0 | ||
| Запись в канал | КА | |||||
| КВ | ||||||
| КС | ||||||
| Чтение из канала | КА | |||||
| КВ | ||||||
| КС | ||||||
| Запись РУС |
РУС – регистр управляющего слова, который находится в блоке управления (БЛ УПР) контроллера. Перед началом обмена процессор программирует контроллер с занесением в РУС кода управляющего слова. Входные сигналы США (0) и США (1) адресуют внутренние блоки контроллера.
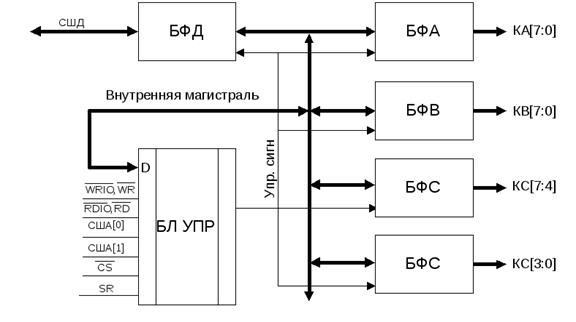 .. Рис. 4.12. Структурная схема контроллера ввода-вывода
.. Рис. 4.12. Структурная схема контроллера ввода-вывода

Рис. 4.13. Логическая схема селектора
Каждое внешнее устройство в составе МП-системы имеет свой адрес и при обращении к нему формируется CS – сигнал выборки микросхемы.
Этот сигнал образуется с помощью селектора, схема которого представлена на рис. 4.13.
На рис. 4.14 изображено условное графическое обозначение контроллера ввода-вывода с подключенным селектором.
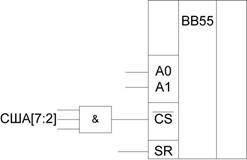
Рис. 4.14. УГО контроллера КР580ВВ55
Контроллер ввода-вывода может использоваться в микропроцессорных системах в различных режимах работы.
Режим «0» – простой ввод-вывод. Отличается тем, что по всем трем каналам (А, В, С) может осуществляться двусторонний обмен данными под управлением процессора.
Режим «1» – предназначен для использования микросхемы в специализированных системах, в которых управление этой микросхемой выполняется не только от процессора. В этом случае канал А и канал В используются для канала данных, а канал С для передачи и формирования управляющих сигналов.
Режим «2» – канал А – для обмена данными, а каналы В, С для формирования УС в соответствии со специальным протоколом обмена.
3.Программируемый параллельный интерфейс кр580вв55
Данное устройство предназначено для организации обмена данными между микропроцессором и внешними устройствами (см. рис. 11).
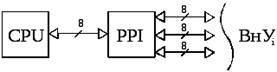
Рис. 11
Основные технические характеристики:
- n-MOP – технология;
- Корпус с 40 выводами;
- Потребляемая мощность - не более 0,35Вт;
- Степень интеграции: 1600 активных элементов;
- Номинальный ток: 60мА;
- Нагрузочная способность: 1 ТТЛ вход.
Условное графическое обозначение КР580ВВ55 представлено на рис. 12.
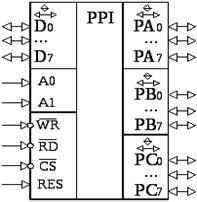
Рис. 12
D0 ¸ D7 – входы/выходы, подключаемые к шине данных микропроцессора;
А0, А1 – входы выбора каналов (портов);
С  S – сигнал выбора микросхемы (приходит с дешифратора);
S – сигнал выбора микросхемы (приходит с дешифратора);
RES – сигнал системного сброса.
Табл.1
Выбор порта или регистра управляющего слова
| А1 | А0 | |
| РА | ||
| РВ | ||
| РС | ||
| РУС |
РУС – регистр управляющего слова.
РА – порт А – имеет два буферных регистра, что позволяет
организовать двунаправленный обмен данными по этому порту.
У РВ и РС – по одному буферному регистру.
Группа А – комбинация порта А и старшей половины порта С (РС4,5,6,7): РА+РС2.
Группа В – РВ+РС1(младшая половина РС).
Структура программируемого параллельного интерфейса приведена на рис. 13.
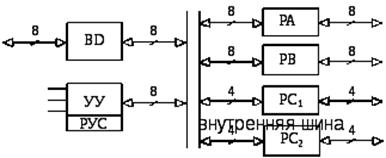
Рис. 13
Направление передачи данных в PPI определяется по табл. 2.
Табл. 2.
Направление передачи данных в ppi
- Ввод данных:
| А1 | А0 | С  S S
| W  R R
| R  D D
| Направление передачи данных |
| ВУi→РА→ШД МП | |||||
| ВУi→РВ→ШД МП | |||||
| ВУi→РС→ШД МП | |||||
| Запрещенная комбинация | |||||
| х | х | х | х | Отключено | |
| х | х | Отключено |
- Вывод данных:
| А1 | А0 | С S
| W R
| R D
| Направление передачи данных |
| ШД МП→РА→ ВУi | |||||
| ШД МП→РВ→ ВУi | |||||
| ШД МП→РС→ ВУi | |||||
| ШД МП→РУС |
Режимы работы программируемого параллельного интерфейса
- Нулевой режим;
- Первый режим;
- Второй режим.
Нулевой режим – ввод/вывод данных. В данном режиме данные записываются в ВУi или читаются (в зависимости от сигнала управления), проходя через порты А, В или С (поочередно). Дополнительные сигналы управления не формируются.
Первый режим – ввод/вывод со стробированием. В данном режиме порты А и В служат для передачи данных, а по линиям порта С передаются управляющие сигналы (STB, RD, IBF, INTR, ACK и др.). Свободные линии порта С также служат для передачи данных. Пример нулевого режима представлен на рис. 14.

Рис. 14
Второй режим – режим двунаправленного обмена. В данном режиме канал В не работает, передача данных происходит через канал А поочередно в двух направлениях. Необходимые управляющие сигналы передаются по линиям порта С.