Задание № 1.
Тема: «Пространственная система сил. Трение»
Выполнил студент группы 222-ЧС ____________________________
ЗАДАНИЕ ДИСТАНЦИОННОГО ОБУЧЕНИЯ
Изучить тему занятия №1 «Пространственная система сил. Трение». В рабочей тетраде письменно ответить на вопросы. После вопроса напечатать слово ОТВЕТ и напечатать (написать) ответ:
Вопросы и здания
1. Что такое пространственная система сил сходящаяся пространственная система сил?
2. Каким образом раскладывается (проецируется) сила на три оси координат (с иллюстрацией) и какой вывод из этого следует?
3. Чему равен модуль силы, расположенной в пространственной системе координат?
4. По рисунку 2 пользуясь формулами направляющих косинусов, определите проекции силы F = 10 Н на оси x, y и z, если все углы между осями и вектором силы F равны 45° (cos 45° = 0,707).
5. Что такое момент силы относительно оси?
6. По рисунку 3 определите момент силы F = 10 Н относительно оси червяного колеса, если угол между вектором силы F и ее проекцией F 1 равен 30° (cos 30° = 0,606).
7. Каково правило знаков моментов сил относительно осей?
8. В чем заключаются законы трения?
9. Какие бывают и как определяются силы трения?
10. Что такое конус трения, от чего он зависит и как определяется угол конуса трения?
11. Как определяется момент трения качения и от чего зависит его величина?
Занятие №3. «Пространственная система сил. Трение»
Система сил, линии действия которых расположены в различных плоскостях, называется пространственной системой сил.
Пространственная система сил называется сходящейся, если линии действия всех сил системы пересекаются в одной точке.
Теорема. Пространственная система сходящихся сил эквивалентна равнодействующей, которая равна векторной сумме этих сил; линия действия равнодействующей проходит через точку пересечения линий действия составляющих сил: FΣ = ΣFi
Проекция силы на ось в пространстве. Силовой многоугольник пространственной системы сил не лежит в одной плоскости, поэтому геометрический и графический способы нахождения равнодействующей неприемлемы, а применяется аналитический способ (метод проекций).
Если сила и ось не лежат в одной плоскости, то проецирующие перпендикуляры также не лежат в одной плоскости (рис. 1).
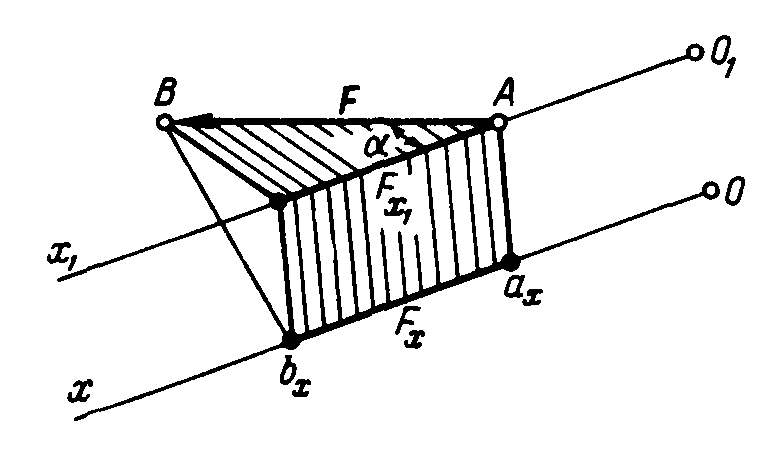
Рис. 1. Проекция силы на ось в пространстве
Для того чтобы определить, чему равна проекция силы Р на ось Ох, следует мысленно провести через начало или конец силы ось Ox, параллельную данной оси Ох, тогда Рх = Рсosα, так как Рx = Рx1.
Правило знаков для проекций остается прежним.
Если вектор силы параллелен оси, то он проецируется на эту ось в натуральную величину.
Если вектор силы лежит в плоскости, перпендикулярной оси, то его проекция на эту ось равна нулю.
Разложение силы по трем осям координат. Пусть дана сила F (рис. 2). Возьмем систему координат так, чтобы начало координат совпадало с началом вектора силы F. Из конца этого вектора опустим перпендикуляр на плоскость ху и разложим силу F на составляющие Fху и Fz, а составляющую Fх — на составляющие Fх и Fy. Тогда F = Fх + Fy + Fz
Достроим полученное изображение до параллелепипеда, у которого составляющие Fх, Fy, Fz являются ребрами, а сила F — диагональю.
Из изложенного можно сделать такой вывод: равнодействующая трех взаимно перпендикулярных сил выражается по модулю и направлению диагональю параллелепипеда, построенного на этих силах.
Из рис. 2видно, что в случаях разложения силы F по трем взаимно перпендикулярным направлениям х, у, z составляющие Fх, Fy, Fz равны по модулю проекциям силы F на эти оси. Эти проекции обозначим Fх, Fy, Fz.
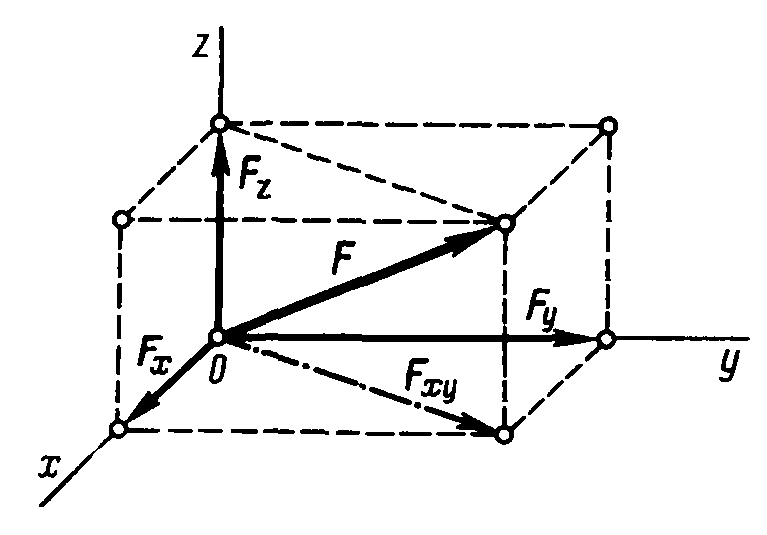
Рис. 2. Проекции силы F на оси координат.
Зная проекции силы на три взаимно перпендикулярные оси координат, можно определить модуль и направление вектора силы по формулам:
модуль силы
направляющие косинусы:

Момент силы относительно оси. Рассмотрим колесо червячной передачи, укрепленное на валу, вращающемся в подшипниках (рис. 3).
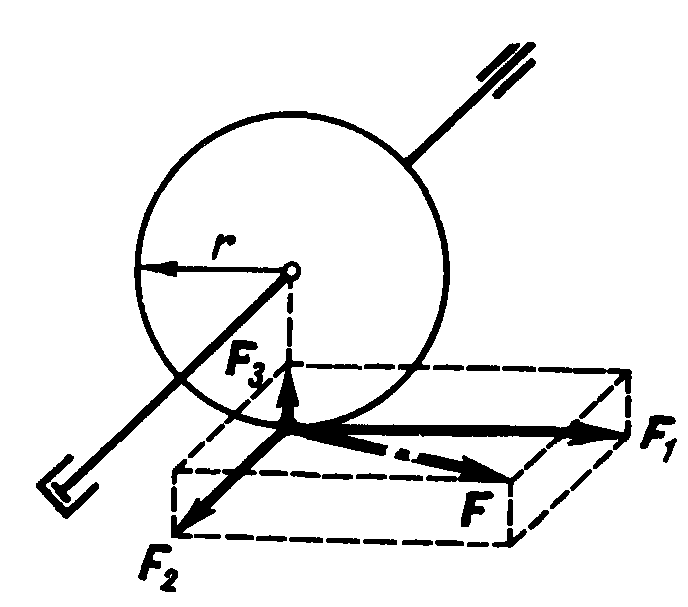
Рис. 3. Силы, действующие на червячное колесо.
Червяк передает червячному колесу усилие F, не лежащее в плоскости, перпендикулярной оси.
Разложим силу F на три взаимно перпендикулярные составляющие F1, F2 и F3. Составляющую F1 назовем окружным усилием, составляющую F2 — осевым усилием, а составляющую F3 — радиальным усилием.
Составляющая F1 вызывает вращательное действие, которое измеряется произведением F 1 r; составляющая F 2 стремится сдвинуть колесо вдоль оси, составляющая F3 стремится изогнуть ось колеса, а вращательное действие этих сил относительно оси равно нулю.
Таким образом, если нужно найти момент силы относительно оси, то следует принимать в расчет только составляющую F1, лежащую в плоскости, перпендикулярной оси, и не пересекающую ось.
Ранее было установлено, что проекция вектора силы на ось есть скалярная алгебраическая величина. В отличие от проекции на ось проекция силы на плоскость есть величина векторная, так как эта проекция характеризуется не только числовым значением, но и положением на плоскости, т. е. направлением. Поэтому моменту силы относительно оси можно дать такое определение: моментом силы относительно оси называется величина, равная моменту проекции этой силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с плоскостью.
Это определение пояснит рис. 4.
Момент силы относительно оси условимся записывать следующим образом:
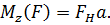
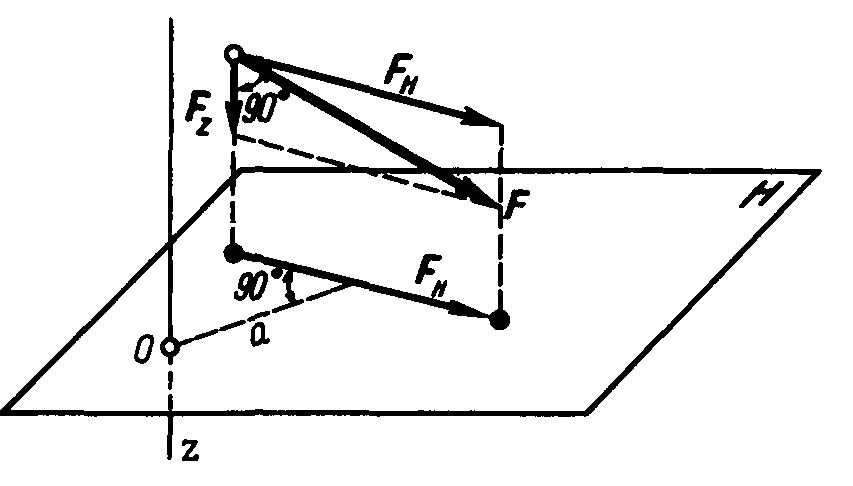
Рис. 4. Определение момента силы относительно оси.
Условимся считать момент силы положительным, если смотреть с положительного конца оси и сила стремится вызвать вращение против часовой стрелки, и наоборот.
Момент силы относительно оси не меняется от перемещения силы вдоль линии ее действия.
Момент силы относительно оси равен нулю в двух случаях (не считая случаев, когда сила равна нулю или действует вдоль оси):
1) если вектор силы параллелен оси, так как при этом проекция силы на плоскость, перпендикулярную оси, равна нулю (см. силу F2 на рис. 3);
2) если линия действия силы пересекает ось, так как при этом плечо равно нулю (см. силу F3 на рис. 3).
Трение
Давно известно, что, если двигать одно тело по поверхности другого, в плоскости соприкосновения возникает сила сопротивления относительному скольжению этих тел. Впервые исследованиями явления трения занимался Леонардо да Винчи. Точное определение силы трения с учетом всех факторов, от которых она зависит, представляет столь сложную задачу, что до сих пор не удается найти полного теоретического решения. Поэтому при изучении законов трения приходится основываться на результатах экспериментов.
Итак, законы трения были найдены опытным путем и в 1771 г. сформулированы французским ученым Кулоном.
Законы трения
1. Сила трения направлена в сторону, противоположную относительной скорости скольжения (рис. 5).
Рис. 5. Иллюстрация к 1-му закону трения
2. Сила трения не зависит от площади трущихся поверхностей.
3. Модуль силы трения пропорционален нормальному давлению.
Различают силу трения при покое и при движении:
| Сила трения покоя | Сила трения при движении |

| 
|
где N – сила нормального давления, f 0 – коэффициент трения покоя, f – коэффициент трения скольжения.
Максимальная величина силы трения F тр max = f o N. Из экспериментов известно, что при движении коэффициент трения скольжения зависит от скорости скольжения тел.
Коэффициенты f 0 и f зависят от материала и физического состояния трущихся поверхностей. Значения этих коэффициентов приведены в табл. 1.
Таблица 1
Коэффициенты трения скольжения
| Материал | Коэффициент трения | |
| покоя f 0 | скольжения f | |
| Камень по камню | 0,6...07 | – |
| Бетон по галечнику | 0,5...0,6 | – |
| Веревка по дереву | 0,5...0,8 | 0,5 |
| Дерево по дереву | 0,4...0,7 | 0,3 |
| Металл по дереву | 0,4...0,6 | 0,3...0,5 |
| Бетон по песку | 0,3...0,4 | – |
| Камень по дереву | 0,4 | – |
| Кожа по металлу | 0,3...0,4 | 0,3 |
| Асбестовая обкладка по стали (чугуну) | 0,25...0,35 | – |
| Бронза по чугуну | 0,16 | – |
| Бронза по чугуну с обильной смазкой | 0,12 | – |
| Сталь по льду | 0,03 | 0,015 |
| Сталь по чугуну, сталь по стали, чугун по чугуну | 0,12...0,2 | 0,1 |
На шероховатой поверхности сила трения может колебаться от нуля до максимального значения, т. е. 0 < F тp < F тр max. В этом случае реакция связи R будет N<R< Rmax. Наибольший угол φ, на который полная реакция R может отклоняться, называется углом трения:
В зависимости от направления приложенной к телу силы максимальная реакция связи R max может иметь различные направления, образуя при этом геометрическое место в пространстве в виде конической поверхности с вершиной в точке касания тела, называемой конусом трения. Если приложенная к телу сила проходит внутри конуса трения, то тело находится в равновесии.
Трением качения, или трением второго рода, называют сопротивление, возникающее при качении одного тела по-другому. Рассмотрим цилиндрический каток радиусом r и весом mg, лежащий на шероховатой поверхности. Приложим в центре катка силу Q (рис. 6, а), которая будет меньше, чем F тр max: Q < F тр max.
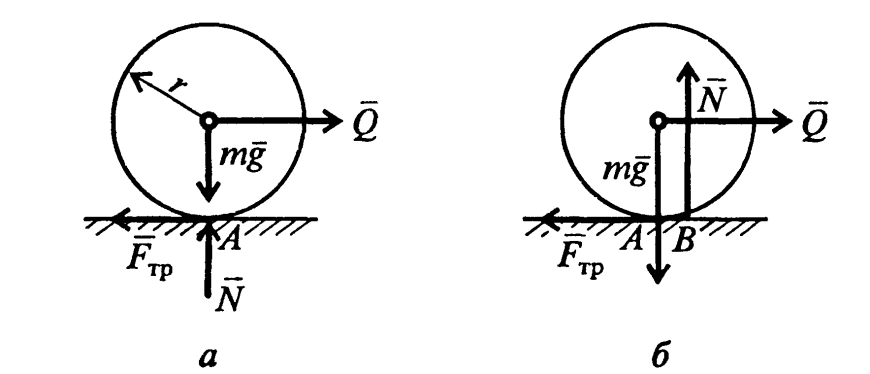
Рис. 6. Трение каечения.
Возникнет сила трения F тр, препятствующая скольжению точки А по плоскости. В этом случае mg и N уравновешиваются, a F три Q образуют пару сил и каток должен катиться по плоскости.
В действительности, если Q < Q пред, каток остается в состоянии покоя. Для объяснения этого явления необходимо в рассуждения внести следующие коррективы (рис. 6, б):

Входящий в это выражение коэффициент k называется коэффициентом трения качения; он измеряется в см. Следовательно, возникает момент трения качения
М тр = kN.
Значения коэффициента трения качения приведены в табл. 2.
Таблица 2