Проверка устойчивости критерием Михайлова
1 Формулировка критерия Михайлова: Чтобы характеристический полином не имел корней в правой полуплоскости необходимо и достаточно, чтобы полное приращение фазы  , при изменении частоты от 0 до
, при изменении частоты от 0 до  было равно
было равно  , где n – порядок систем.
, где n – порядок систем.
2 Формулировка критерия Михайлова: Чтобы система была устойчива, необходимо и достаточно, чтобы при изменении частоты от 0 до ∞, годограф Михайлова должен последовательно проходить N – квадрантов и в N-том уходить в бесконечность.
3 Формулировка критерия Михайлова: Чтобы система была устойчива, необходимо и достаточно чередование нулей мнимой (сначала) и действительной части характеристического уравнения при изменении частоты  от 0 до
от 0 до  .
.
Рассчитаем устойчивость нашей системы методом Михайлова:
Запишем характеристический полином системы:
 .
.
Перейдем к комплексным переменным:

Выделим действительную и мнимую части:






Чтобы система была устойчива за Михайловым, нужно чтобы частоты росли а нули чередовались, т.е. было истинно следующее выражение:


Как видим из данной записи, наша система устойчива.
5.3 Предельный коэффициент усиления
Предельный коэффициент усиления системы – эт`о такой коэффициент усиления, при котором система находиться на границе устойчивости – т.е. переходной процесс, характеризующий систему, имеет вид колебательной кривой.


Характеристический полином:
D(s) = 
Чтобы система была устойчива, необходимо и достаточно, чтобы

Из этого следует, что система устойчива при любых k.
6. Анализ качества системы
Под качеством САУ понимают показатели качества переходного процесса и ошибку в установившемся состоянии. К показателям качества переходного процесса относятся:
- время установления tуст – это промежуток времени, за который переходной процесс впервые достигает установившегося значения;
- время регулирования tп.п (переходного процесса) – время, за которое переходная характеристика становится и остается по абсолютной величине меньше наперед заданной величины перерегулирования s.

Рисунок 7.1 - График показателей качества
находим:
hmax=1,22; hуст=0.907; tуст=3,41; tпп=13,6;
Вычислим перерегулирование:
 .
.
7. Вычисление установившейся ошибки
Точность САУ определяется видом входного воздействия, параметрами и структурой системы. Ошибку системы в установившемся режиме можно вычислить, используя передаточную функцию по ошибке.
 .
.
Передаточная функция по ошибке:
 .
.

Коэффициенты ошибок:



Методы повышения точности
К числу общих методов повышения точности систем автоматического регулирования относятся:
1) увеличение коэффициента разомкнутой системы;

Рисунок 9.1 – Схема системы с увеличенным коефициентом усиления разомкнутой системы.

Рисунок 9.2 – Ошибка системы после использования 1го метода повышения точности
 .
.
Передаточная функция по ошибке:
 .
.

2) включение в систему изодромного звена;

Рисунок 9.3 – Схема системы с использованием изодромного звена.

Рисунок 9.4 – Ошибка системы после использования 2го метода повышения точности
Передаточная функция изодромного звена имеет вид:

 .
.
Передаточная функция по ошибке:
 .
.

3) ПИД регулятор:

Рисунок 9.5 – Схема системы с использования ПИД регулятора

Рисунок 9.6 – Ошибка системы после использования 3го метода повышения точности
9. Синтез САУ с применением последовательного корректирующего звена
Задача синтеза последовательного корректирующего устройства (ПКУ) заключается в следующем. Имеется исходная система автоматического управления, структура и параметры элементов которой известны. Требуется определить передаточную функцию ПКУ, включение, которого в систему обеспечит получение нужных показателей качества: величины перерегулирования, времени регулирования, ошибки в установившемся режиме.
Алгоритм синтеза последовательного КУ
1) построение ЛАХ исходной разомкнутой системы;
2) построение желаемой ЛАЧХ по заданным показателям качества (время регулирования, запас устойчивости по амплитуде и фазе, степень астатизма, коэффициенты ошибок, коэффициент усиления);
3) определение передаточной функции корректирующего устройства:



На основании приведенного алгоритма синтезируем корректирующее устройство для приведенной выше системы.
Построение исходной ЛАЧХ

1) на частоте  откладываем значение
откладываем значение
L=20*lgK=20*lg10=20
2) определяем частоты сопряжения
 :
:
 ,
,
3) через точку  ,
,  под наклоном 0 ДБ/декаду, так как в исходной системе нет астатизма (нет свободной s в знаменателе), проводим линию до пересечения с линией
под наклоном 0 ДБ/декаду, так как в исходной системе нет астатизма (нет свободной s в знаменателе), проводим линию до пересечения с линией  ;
;
4) так как выражение  стоит в знаменателе, то дальше кривая пойдет под наклоном –20ДБ/декаду до пересечения с линией
стоит в знаменателе, то дальше кривая пойдет под наклоном –20ДБ/декаду до пересечения с линией  ;
;
5) выражение  стоит в знаменателе, поэтому, начиная с частоты и до
стоит в знаменателе, поэтому, начиная с частоты и до  , кривая пойдет под наклоном –40ДБ/декаду.
, кривая пойдет под наклоном –40ДБ/декаду.
Построение желаемой ЛАЧХ
Прежде, чем приступить к построению желаемой ЛАЧХ, необходимо задаться желаемыми показателями качества:
- перерегулирование  ;
;
- время регулирования  ;
;
- порядок астатизма  ;
;
- коэффициент ошибки по скорости  ;
;
По заданным показателям качества ЛАЧХ строится в такой последовательности:
1) Определяем коэффициент добротности по скорости

Откладываем на оси частот величину  и через эту точку проводим прямую под наклоном –20ДБ/декаду, так как степень астатизма желаемой системы
и через эту точку проводим прямую под наклоном –20ДБ/декаду, так как степень астатизма желаемой системы  .
.
2) Определяем частоту среза. Для этого по известному значению  определяем величину
определяем величину  , а по величине
, а по величине  определяем величину
определяем величину
 .
.
Отсюда вычисляем значение частоты положительности

Тогда частота среза выбирается из диапазона  . В нашем случае
. В нашем случае
wср=(0,6¸0,9)wп=0,8·wп=0,8·9,425=7,54.
3) Определяем сопрягающие частоты. По зависимости значения перерегулирования  от запаса устойчивости по модулю определяем значение запаса устойчивости по модулю
от запаса устойчивости по модулю определяем значение запаса устойчивости по модулю

Через точку  проводим линию под наклоном –20ДБ/декаду.
проводим линию под наклоном –20ДБ/декаду.
Следующий этап построения – сопряжение частот, которое проводится по типовым наклонам характеристик:

При этом желательно, чтобы в области больших частот желаемая ЛАЧХ была аналогична исходной (ее наклон).
Высокочастотный участок образуется асимптотой с наклоном (-40)дБ/дек, что соответствует наклону исходной ЛАХ в этой области. Это делается для того, чтобы желаемая ЛАХ как можно меньше отличалась от исходной, то есть для упрощения корректирующего устройства.
ЛАХ желаемой системы построена по типовым наклонам 20-40-20-40
Частоты w*1,w*2,w*3,w*4 определяем графически:
w*1=0,125; w*2=1,13; w*3 =30.
Для ЛАХ запишем:

Передаточная функция корректирующего устройства запишется следующим образом:
 ,
,
где 
Все построения приведены ниже.
Моделируем систему в среде MatLab:

Рисунок 10.2 – Модель системы в среде MatLab
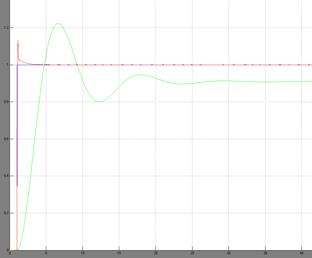
Рисунок 10.3 – Переходной процесс скорректированной системы
Рассмотрим переходные процессы исходной и усовершенствованной систем. Очевидно, что введение ПКУ существенно улучшило показатели качества САУ. Перерегулирование не превышает 13% (хотя в исходной САУ – 22%), время регулирование – 0,25с (в исходной САУ – 13,6с), время установления – 0,1с (в исходной САУ – 3,41с).
Заключение
В данной курсовой работе был рассмотрен пример синтеза системы. Построив функциональную схему системы и проанализировав звенья, вошедшие в её состав, мы получили структурную схему САУ и построили её модель в среде разработки MatLab. В ходе исследования свойств системы, мы рассчитали её устойчивость и проанализировали качество и точность. Для улучшения показателей полученных в результате расчетов качества системы, был применен метод синтеза САУ с применением последовательного корректирующего звена. Это позволило добиться следующих показателей качества скорректированной системы: время переходного процесса уменьшилось с 13,6с до 0,25с, перерегулирование – со значения 22% понизилось до 12%.
Таким образом, можно сделать вывод, что спроектированная в данной работе САУ отвечает требованиям по устойчивости, точности в установившемся режиме и требованиям к качеству переходных процессов.