Лекция 10.02
Теоретические аспекты эффективности внедрения систем с частотно-регулируемыми приводами.
Возможность управления частотой вращения короткозамкнутых асинхронных электродвигателей была доказана сразу же после их изобретения. Реализовать эту возможность удалось лишь с появлением силовых полупроводиниковых приборов – сначала тирристоров, а позднее транзисторов IGBT. В настоящее время во всём мире широко реализуется способ управления асинхронной машиной, которая сегодня рассматривается не только с точки зрения экономии энергии, но и с точки зрения совершенствования управления технологическим процессом.
В промышленности и быту применяют двигатели переменного и постоянного тока. Исторически сложилось, что для регулирования скорости вращения чаще использовали двигатель постоянного тока. Преобразователь в данном случае регулировал только напряжение, был прост и дёшев. Однако двигатели постоянного тока имеют сложную конструкцию, критичный в эксплуатации щёточный аппарат и сравнительно дороги.
Асинхронные двигатели широко распространены, надёжны, имеют относительно невысокую стоимость, хорошие эксплуатационные качества, но регуляторы скорости их вращения из-за сложности систем электронного регулирования частоты питающего напряжения стоили до начала 80-х годов дорого и не обладали качествами, необходимыми для широкого внедрения в индустрию. Быстрый рост рынка преобразователей частоты для асинхронных двигателей не в последнюю очередь стал возможен в связи с появлением новой элементной базы – силовых модулей на базе IGBT (биполярный транзистор с изолированным затвором), рассчитанный на токи до нескольких килоампер, напряжением до нескольких киловольт и имеющих частоту коммутации 30 кГц и выше.
Существует два основных типа преобразователей частоты: с непосредственной связью и с промежуточным контуром постоянного тока. В первом случае выходное напряжение синусоидальной формы формируется из участков синусоид преобразуемого входного напряжения. При этом максимальное значение выходной частоты принципиально не может быть равным частоте питающей сети. Частота на выходе преобразователя этого типа обычно лежит в диапазоне от 0 до 25-33 Гц. Но наибольшее распространение получили преобразователи чаcтоты с промежуточным контуром постоянного тока, выполненные на базе инвенторов напряжения. Структурная схема такого преобразователя приведена на Рис. 1.
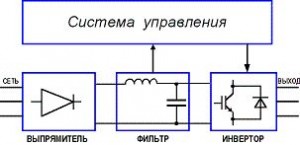
Рис. 1. Структурная схема преобразователя частоты с промежуточным контуром постоянного тока.
Типы нагрузок
Требования к электроприводу определяются диапазоном требуемых скоростей и типом нагрузки. Зависимость между скоростью вращения и моментом сопротивления неодинаковы для нагрузок разного типа (Рис. 2). Многие нагрузки могут рассматриваться как имеющие постоянный момент во всём диапазоне изменения скорости. К ним относятся, например, конвейеры, компрессоры и поршневые насосы.
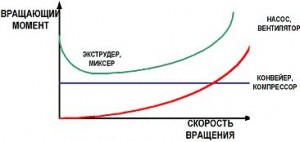
Рис.2. Механические характеристики типичных нагрузок
Некоторые виды нагрузки имеют переменную механическую характеристику, для которой момент нагрузки возрастает с увеличением скорости вращения. Типичным примером устройств с такой нагрузкой являются центробежные насосы и вентиляторы, чья механическая характеристика описывается уравнением квадратичной параболы, а значит, потребляемая мощность пропорциональна кубу скорости вращения. Из этого следует, что даже небольшое снижение скорости электропривода может дать значительный выигрыш в мощности – вот почему экономия электроэнергии является главным преимуществом использования управляемого электропривода для насосов и вентиляторов. Теоретически снижение скорости на 10% даёт тридцати процентную экономию мощности.
Есть класс устройств (экструдеры, промышленные миксеры), у которых механическая характеристика близка к характеристике насосов и вентиляторов. Но особенность нагрузок такого типа состоит в наличии высокого пускового момента, который с увеличением скорости снижается, а затем, начиная с некоторого значения, характеристика становится квадратичной.
Кроме того, существует и большое число нагрузок с совершенно уникальными механическими характеристиками. Поэтому в любом случае выбору электродвигателя и преобразователя частоты должен предшествовать этап анализа характера нагрузки и её механической характеристики.
Режимы управления электродвигателем
В зависимости от характера нагрузки преобразователь частоты обеспечивает различные режимы управления электродвигателем, реализуя ту или иную зависимость между скоростью вращения электродвигателем и выходным напряжением.
Режим с линейной зависимостью между напряжением и частотой (U/f=const) реализуется простейшими преобразователями частоты для обеспечения постоянного момента нагрузки и используется для управления синхронными двигателями или двигателями, подключёнными параллельно. Вместе с тем при уменьшении частоты, начиная с некоторого значения, максимальный момент двигателя начинает падать. Для повышения момента на низких частотах в преобразователях предусматривается функция повышения начального значения выходного напряжения, которая используется для компенсации падения момента для нагрузок с постоянным моментом или увеличения начального момента для нагрузок с высоким пусковым моментом, таких, например, как промышленный миксер.
Для регулирования электроприводов насосов и вентиляторов используется квадратичная зависимость напряжения/частоты (U/f2=const). Этот режим, так же как и предыдущий, можно использовать для управления параллельно подключенными двигателями. Вместе с тем для повышения качества управления приводом требуется использование других, более совершенных методов управления. К ним относятся метод управления протокосцеплением (FluxCurrentControl – FCC) и метод бессенсорного векторного управления (SensorlessVectorControl – SVC). Оба метода базируются на использовании адаптивной модели электродвигателем, которая строится с помощью специализированного вычислительного устройства, входящего в состав управления преобразователя.
Наиболее точное и эффективное управление обеспечивает режим векторного управления без датчика обратной связи по скорости (SVC). Если в двигателях постоянного тока имеются две обмотки (статорная, или возбуждённая и роторная, или якорная), что позволяет управлять раздельно скоростью вращения (ток возбуждения) и электромагнитным моментом (ток якоря), то в двигателях переменного тока с короткозамкнутым ротором имеется всего лишь одна статорная обмотка, через которую формируется возбуждающее магнитное поле и определяет вращающий момент. С этим и связаны все трудности управления электродвигателем. Выход остаётся один: необходимо управлять амплитудой и фазой статорного тока, то есть его вектором, однако для управления фазой тока, а значит, и фазой магнитного поля статора относительно вращающегося ротора необходимо знать точное положение ротора в любой момент времени. Эта задача может быть решена с использованием датчика положения, например, шифратора приращений. В такой конфигурации привод переменного тока по качеству регулирования становится сопоставим с приводом постоянного тока, но в составе большинства стандартных электродвигателей переменного тока встроенные датчики положения отсутствуют, поскольку их введение неизбежно ведёт к усложнению конструкции двигателя и существенному повышению его стоимости.
Применение же современной технологии векторного управления позволяет обойти это ограничение путём использования математической адаптивной модели двигателя для предсказания положения ротора. При этом система управления должна с высокой точностью измерять значение выходных токов и напряжений, обеспечивать расчёт параметров двигателя (сопротивление статора, значение индуктивности рассеяния и.т.д.), точно моделировать тепловые характеристики двигателя с различными режимами его работы, осуществлять большой объём вычислений с очень высокой скоростью. Последнее обеспечивается применением в составе системы управления преобразователя специализированных интегральных схем ASIC.
Применение частотного регулирования приводов позволяет существенно уменьшить и эксплуатационные затраты, связанные с обслуживанием агрегатов и систем. Например, снижение перепада давления между всасывающим и напорным патрубками насосного агрегата увеличивает срок службы сальниковых уплотнений, практически исключая гидроудары и обеспечивает стабильность давлений в трубопроводах сетей, а также минимизирует затраты на обслуживание.