Передаточная функция для структурной схемы соединения звеньев – формула




















Таблица Гурвица соответствует системе регулирования 3-го порядка
 неустойчивой
неустойчивой  устойчивой
устойчивой
Расположение корней характеристического уравнения соответствует системе управления
 неустойчивой
неустойчивой  устойчивой
устойчивой
 на гр.колебат.уст-ти
на гр.колебат.уст-ти  на гр.апериод.уст-ти
на гр.апериод.уст-ти
.... - способность системы автоматического управления самостоятельно возвращаться в состояние равновесия после устранения возмущающего воздействия. Устойчивость
При показанном на рисунке расположении на комплексной плоскости корней характеристического уравнения система регулирования
 устойчива, переходный процесс апериодический
устойчива, переходный процесс апериодический
 устойчива, процесс колебательный
устойчива, процесс колебательный
 на грани устойчивости, процесс апериодический
на грани устойчивости, процесс апериодический
 на грани устойчивости, колебательный
на грани устойчивости, колебательный
 неустойчивый, апериодический
неустойчивый, апериодический
 неустойчива, переходный процесс колебательный
неустойчива, переходный процесс колебательный
 Систмема управления, характеристическое уравнение которой
Систмема управления, характеристическое уравнение которой 

Уравнение динамики соответствует объекту регулирования  нейтральному 2-го порядка
нейтральному 2-го порядка
 устойчивому 1-го порядка
устойчивому 1-го порядка
 нейтральному 1-го порядка
нейтральному 1-го порядка
 устойчивому 2-го порядка
устойчивому 2-го порядка
 устойчивому 1-го порядка
устойчивому 1-го порядка
 неустойчивому 1-го порядка
неустойчивому 1-го порядка
Кривая разгона объекта регулирования
 кривая с затухающими колебаниями
кривая с затухающими колебаниями
 S-образная кривая
S-образная кривая
_______ - зависимость выходной величины объекта регулирования от времени при ступенчатом изменении его входной величины, отличающемся от единичного. кривая разгона
Кривая разгона соответствует объекту регулирования
 уст 1го порядка
уст 1го порядка
 уст 2го порядка
уст 2го порядка
 нейтральная 1го порядка
нейтральная 1го порядка
 нейтральная 1го порядка с запаздыванием
нейтральная 1го порядка с запаздыванием
 нейтральная 2го порядка
нейтральная 2го порядка
Отношение постоянных времени – кривая разгона:
 1,5
1,5  2,5
2,5
........ объекта - время, в течение которого выходная величина устойчивого объекта, изменяясь с постоянной начальной скоростью, достигает нового установившегося значения. постоянная времени
.... - это интервал времени между моментом изменения входной величины объекта и началом изменения его выходной величины.
запаздывание
.... - способность объекта самостоятельно приходить в новое состояние равновесия после нанесения возмущающего воздействия. самовыравнивание
.... - способность объекта накапливать или сохранять вещество или энергию. Емкость

Динамические свойства объекта, кривая разгона которого имеет вид
 чист запаздывание и емкость
чист запаздывание и емкость
 емкость и положит самовыравнивание
емкость и положит самовыравнивание
 емкость
емкость
 емкость и отриц самовыравнивание
емкость и отриц самовыравнивание
 чист запаздывание, емкость, положит самовыравнивание
чист запаздывание, емкость, положит самовыравнивание
Для объектов регулирования, кривые разгона которых приведены на рисунке, соблюдается следующее соотношение между их степенью самовыравнивания р и емкостью С:
 С1 = С2, р1 > р2
С1 = С2, р1 > р2
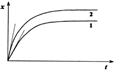 С1 > С2, р1 > р2
С1 > С2, р1 > р2
 С1 < С2, р1 > р2
С1 < С2, р1 > р2
 С1 = С2, р1 < р2
С1 = С2, р1 < р2
 С1 > С2, р1 < р2
С1 > С2, р1 < р2
 С1 < С2, р1 < р2
С1 < С2, р1 < р2
Передаточная функция ___ соответствует объекту регулирования
 устойчивому 1-го порядка с запаздыванием
устойчивому 1-го порядка с запаздыванием
 устойчивому 1-го порядка
устойчивому 1-го порядка
 нейтральному 1-го порядка
нейтральному 1-го порядка
 нейтральному 1-го порядка с запаздыванием
нейтральному 1-го порядка с запаздыванием  устойчивому 2-го порядка
устойчивому 2-го порядка



Зависимостьюописывается закон регулирования ____ регулятора  пропорционального
пропорционального
 интегрального
интегрального
 проп-инт
проп-инт
 проп-диф
проп-диф
 проп-инт-диф
проп-инт-диф

1 пропорционального
2 пропорционально-дифференциального
3 пропорционально-интегрального
4 пропорционально-интегрально-дифференциального
5 двухпозиционного, интегрального
При единичном ступенчатом изменении входной величины по приведенной на рисунке зависимости изменяется выходной сигнал ___ регулятора
 пропорционального
пропорционального
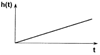 интегрального
интегрального
 пропорционально-интегрального
пропорционально-интегрального
 пропорционально-дифференциального
пропорционально-дифференциального
 проп-интегрально-дифференциального
проп-интегрально-дифференциального
 Пропорционального
Пропорционального
 пропорционально-дифференциального
пропорционально-дифференциального


1. интегрального
2. пропорционального
3. пропорционально-дифференциального
4. пропорционально-интегрального
5. пропорционально-интегрально-дифференциального
Коэффициент усиления и время ___ являются параметрами настройки
Изодрома - пропорционально- интегрального регулятора с зависимыми параметрами настройки
Интегрирования - пропорционально- интегрального регулятора с независимыми параметрами настройки
Дифференцирования - пропорционально- дифференциального регулятора с независимыми параметрами настройки
Предварения - пропорционально- дифференциального регулятора с зависимыми параметрами настройки

Статическая ошибка регулирования всегда присутствует в системах регулирования с _______ регулятором
пропорциональным, пропорционально-дифференциальным
Статическая ошибка регулирования всегда отсутствует в системах регулирования с _______ регулятором
пропорционально-интегральным, пропорционально-интегрально-дифференциальным
Разность между новым установившимся значением регулируемой величины и ее заданным значением представляет собой
статическую ошибку регулирования
Максимальное отклонение регулируемой величины в переходном процессе от ее заданного значения представляет собой
динамическую ошибку регулирования
Выраженное в процентах отношение второй х2 и первой x1 амплитуд колебаний регулируемой величины во время переходного процесса представляет собой
перерегулирование
Квадрат площади между кривой переходного процесса и новым установившимся значением регулируемой величины представляет собой
интегральную квадратичную ошибку регулирования
........ - это интервал времени, в течение которого, начиная от момента приложения типового воздействия на систему, регулируемая величина достигает нового равновесного значения с некоторой заранее установленной точностью.
Время регулирования
Статическая ошибка регулирования возникает в одноконтурной системе, состоящей из объекта с положительным самовыравниванием и
пропорционального регулятора
Автоколебания возникают в одноконтурной системе, состоящей из объекта с положительным самовыравниванием и _______ регулятора
Двухпозиционного







