Теоретическая механика
Методические указания и контрольные задания
Для студентов специальности
Технология пряжи, тканей, трикотажа
И нетканых материалов»
Заочной сокращенной формы обучения
ВИТЕБСК
УДК 538. 8
Теоретическая механика: методические указания и контрольные задания для студентов специальности 1-50 01 01«Технология пряжи, тканей трикотажа и нетканых материалов»заочной сокращенной формы обучения
Витебск: Министерство образования Республики Беларусь, УО ”ВГТУ”, 2011.
Составители: профессор А.В. Локтионов,
доцент Т.А. Мачихо
Методические указания содержат теоретический и практический материал, необходимый для выполнения контрольных работ студентами технологических специальностей. Каждый тип задач сопровождается теоретическими комментариями и примером решения с подробными объяснениями.
Одобрено кафедрой механики УО “ВГТУ” 24 июня 2011 г., протокол № 7.
Рецензент: профессор Б.С. Сункуев
Редактор: доцент В.Г. Буткевич
Рекомендовано к опубликованию редакционно-издательским советом УО “ВГТУ” «___» ________ 2011 г., протокол № ___.
Ответственный за выпуск: И.Л. Кудина
Учреждение образования «Витебский государственный технологический университет»
Подписано к печати ______. Формат _______. Уч.- изд. лист. _______.
Печать ризографическая. Тираж ____ экз. Заказ №_____ Цена _______.
Отпечатано на ризографе учреждения образования «Витебский государственный технологический университет».
Лицензия 02330/0494384 от 16.03.2009.
210035, г. Витебск, Московский проспект, 72.
Содержание
Введение 4
Рабочая программа 5
Вопросы по курсу «Теоретическая механика» для подготовки к экзамену 8
Вопросы по статике для тестового контроля знаний 10
Вопросы по кинематике для тестового контроля знаний 11
Вопросы по динамике для тестового контроля знаний 12
Контрольные задания 13
Задачи к контрольным заданиям 15
Статика 15
Кинематика 22
Динамика 38
Основные понятия высшей математики в задачах курса теоретической
механики 66
Литература 72
Введение
В курсе теоретической механики студенты изучают три ее раздела: статику, кинематику и динамику. Для изучения курса необходимо иметь соответ-ствующую математическую подготовку. Во всех разделах курса широко используется векторная алгебра. Необходимо уметь вычислять проекции векторов на координатные оси, находить геометрически (построением векторного треугольника или многоугольника) и аналитически (по проекциям на координатные оси) сумму векторов, вычислять скалярное и векторное произведения двух векторов и знать свойства этих произведений, а в кинематике и динамике – дифференцировать векторы. Надо также уметь свободно пользоваться системой прямоугольных декартовых координат на плоскости и в пространстве, знать, что такое единичные векторы (орты) этих осей и как выражаются составляющие вектора по координатным осям с помощью ортов.
Для изучения кинематики необходимо уметь дифференцировать функции одного переменного, строить графики этих функций, быть знакомым с понятиями о естественном трехграннике, кривизне кривой и радиусе кривизны, знать основы теории кривых второго порядка.
Для изучения динамики надо уметь находить интегралы (неопределенные и определенные) от простейших функций, вычислять частные производные и полный дифференциал функций нескольких переменных, а также уметь интегрировать дифференциальные уравнения первого порядка с разделяющимися переменными и линейные дифференциальные уравнения второго порядка с постоянными коэффициентами.
Изучать материал рекомендуется по темам (пунктам приводимой ниже программы) или по главам (параграфам) учебника. Особое внимание обратите на формулировки соответствующих определений, теорем. Однако не следует стараться заучивать формулировки; важно понять их смысл и уметь изложить результат своими словами. Необходимо также понять ход всех доказательств и разобраться в их деталях. Закончив изучение темы, полезно составить краткий конспект, по возможности не заглядывая в учебник.
При изучении курса особое внимание следует уделить приобретению навыков решения задач. Для этого, изучив материал данной темы, надо сначала обязательно разобраться в решениях соответствующих задач, которые приводятся в учебнике, обратив особое внимание на методические указания по их решению. Затем постараться решить самостоятельно несколько аналогичных задач из сборника задач И.В. Мещерского.
Закончив изучение темы, нужно проверить, можете ли вы дать ответ на все вопросы программы курса по этой теме (осуществить самопроверку). Приведены вопросы для проверки знаний студентов в компьютерных классах УО «ВГТУ» по разделам курса.
Указания по выполнению контрольных заданий приводятся ниже (после рабочей программы). Кроме того, к каждой задаче даются методические указания по ее решению и приводится пример решения.
РАБОЧАЯ ПРОГРАММА
СТАТИКА ТВЕРДОГО ТЕЛА
Механическое движение как одна из форм движения материи. Предмет механики. Теоретическая механика и ее место среди естественных и технических наук. Механика как теоретическая база ряда областей современной техники. Объективный характер законов механики.
Основные понятия и аксиомы статики. Предмет статики. Основные понятия статики: абсолютно твердое тело, сила, эквивалентные и уравновешенные системы сил, равнодействующая, силы внешние и внутренние.
Аксиомы статики. Связи и реакции связей. Основные виды связей: гладкая плоскость или поверхность, гладкая опора, гибкая нить, цилиндрический и сферический шарниры, невесомый стержень; реакции этих связей.
Система сходящихся сил. Геометрический и аналитический способы сложения сил. Сходящиеся силы. Равнодействующая сходящихся сил. Геометрические и аналитические условия равновесия системы сходящихся сил.
Равновесие произвольной системы сил. Момент силы относительно точки (центра) как вектор. Пара сил; момент пары. Свойства пары сил. Понятие о приведении системы сил к заданному центру. Главный вектор и главный момент системы сил. Условия равновесия произвольной системы сил, приложенных к твердому телу.
Система сил, расположенных на плоскости (плоская система сил). Алгебраическая величина момента силы. (Вычисление главного вектора и главного момента плоской системы сил.) Аналитические условия равновесия плоской системы сил. Условия равновесия плоской системы параллельных сил. Теорема Вариньона о моменте равнодействующей. (Равновесие системы тел.)
Система сил, расположенных в пространстве (пространственная система сил). Момент силы относительно оси. Зависимость между моментами силы относительно центра и относительно оси, проходящей через этот центр. Аналитические условия равновесия произвольной пространственной системы сил. Условия равновесия пространственной системы параллельных сил.
Центр тяжести. Центр тяжести твердого тела и его координаты. Центр тяжести объема, площади и линии. Способы определения положения центров тяжести.
КИНЕМАТИКА
Введение в кинематику. Предмет кинематики. Пространство и время в классической механике. Относительность механического движения. Система отсчета. Задачи кинематики.
Кинематика точки. Векторный способ задания движения точки. Траектория точки. Скорость точки как производная от ее радиус-вектора по времени. Ускорение точки как производная от вектора скорости по времени. Координатный способ задания движения точки в прямоугольных декартовых координатах. Определение траектории точки. Определение скорости и ускорения точки по их проекциям на координатные оси.
Естественный способ задания движения точки. Оси естественного трехгранника. Алгебраическая величина скорости точки. Определение ускорения точки по его проекциям на оси естественного трехгранника: касательное и нормальное ускорения точки.
КИНЕМАТИКА ТВЕРДОГО ТЕЛА
Поступательное и вращательное движения твердого тела. Поступательное движение твердого тела. Теорема о траекториях, скоростях и ускорениях точек твердого тела при поступательном движении. Вращение твердого тела вокруг неподвижной оси. Уравнение (закон) вращательного движения твердого тела. Угловая скорость и угловое ускорение тела. Скорость и ускорение точки твердого тела, вращающегося вокруг неподвижной оси. Вектор угловой скорости тела. Плоскопараллельное (плоское) движение твердого тела. Плоское движение твердого тела и движение плоской фигуры в ее плоскости. Уравнения движения плоской фигуры. Разложение движения плоской фигуры на поступательное вместе с полюсом и вращательное вокруг полюса; независимость угловой скорости фигуры от выбора полюса. Определение скорости любой точки фигуры как геометрической суммы скорости полюса и скорости этой точки при вращении фигуры вокруг полюса. Теорема о проекциях скоростей двух точек фигуры (тела). Мгновенный центр скоростей. Определение скоростей точек плоской фигуры с помощью мгновенного центра скоростей.
Сложное (составное) движение точки. Абсолютное и относительное движения точки; переносное движение. Теорема о сложении скоростей. Теорема о сложении ускорений при переносном поступательном и переносном вращательном движениях; кориолисово ускорение и его вычисление.
ДИНАМИКА
Введение в динамику. Предмет динамики. Основные понятия и определения: масса, материальная точка, сила. Законы механики Галилея-Ньютона. Инерциальная система отсчета. Задачи динамики.
Динамика точки. Дифференциальные уравнения движения свободной и несвободной материальной точки в декартовых координатах. Две основные задачи динамики для материальной точки. Решение первой задачи динамики.
Решение второй задачи динамики. Начальные условия. Постоянные интегрирования и их определение по начальным условиям. Примеры интегрирования дифференциальных уравнений движения точки в случаях силы, зависящей от времени, от положения точки и от ее скорости.
Относительное движение материальной точки. Дифференциальные уравнения относительного движения материальной точки; переносная и кориолисова силы инерции. Принцип относительности классической механики. Случай относительного покоя.
Прямолинейные колебания точки. Свободные колебания материальной точки под действием восстанавливающей силы, пропорциональной расстоянию от центра колебаний. Амплитуда, начальная фаза, частота и период колебаний. Затухающие колебания материальной точки при сопротивлении, пропорциональном скорости; период этих колебаний, декремент колебаний. Вынужденные колебания точки при гармонической возмущающей силе и сопротивлении, пропорциональном скорости. Резонанс.
Введение в динамику механической системы. Механическая система. Классификация сил, действующих на систему: силы активные (задаваемые) и реакции связей; силы внешние и внутренние. Свойства внутренних сил. Масса системы. Центр масс; радиус-вектор и координаты центра масс.
Момент инерции. Момент инерции твердого тела относительно оси; радиус инерции. Теорема о моментах инерции тела относительно параллельных осей. Примеры вычисления моментов инерции: моменты инерции однородного тонкого стержня, тонкого круглого кольца или полого цилиндра, круглого диска или сплошного круглого цилиндра.
Общие теоремы динамики
Теорема о движении центра масс. Дифференциальные уравнения движения механической системы. Теорема о движении центра масс механической системы. Закон сохранения движения центра масс.
Теорема об изменении количества движения. Количество движения материальной точки. Элементарный импульс силы. Импульс силы за конечный промежуток времени. Теорема об изменении количества движения точки в дифференциальной и в конечной формах.
Количество движения механической системы; его выражение через массу системы и скорость ее центра масс. Теорема об изменении количества движения механической системы в дифференциальной и в конечной формах. Закон сохранения количества движения механической системы.
Теорема об изменении момента количества движения. Момент количества движения материальной точки относительно центра и относительно оси. Теорема об изменении момента количества движения точки.
Главный момент количеств движения или кинетический момент механической системы относительно центра и относительно оси. Кинетический момент вращающегося твердого тела относительно оси вращения. Теорема об изменении кинетического момента механической системы. Закон сохранения кинетического момента механической системы. Дифференциальное уравнение вращательного движения твердого тела вокруг неподвижной оси.
Теорема об изменении кинетической энергии. Кинетическая энергия материальной точки. Элементарная работа силы; аналитическое выражение элементарной работы. Работа силы на конечном перемещении точки ее приложения. Работа силы тяжести, силы упругости и силы тяготения. Мощность. Теорема об изменении кинетической энергии точки.
Кинетическая энергия механической системы. Кинетическая энергия твердого тела при поступательном движении, при вращении вокруг неподвижной оси и при плоскопараллельном движении тела. Теорема об изменении кинетической энергии механической системы. Равенство нулю суммы работ внутренних сил в твердом теле. Работа и мощность сил, приложенных к твердому телу, вращающемуся вокруг неподвижной оси.
Принцип Даламбера. Принцип возможных перемещений. Сила инерции материальной точки. Принцип Даламбера для материальной точки и механической системы. Возможные или виртуальные перемещения точки и механической системы. Число степеней свободы системы. Идеальные связи. Принцип возможных перемещений. Общее уравнение динамики.
Уравнения Лагранжа. Обобщенные координаты системы; обобщенные скорости. Выражение элементарной работы в обобщенных координатах. Обобщенные силы и их вычисление. Дифференциальные уравнения движения системы в обобщенных координатах или уравнения Лагранжа 2-го рода.
Вопросы по курсу «Теоретическая механика» для подготовки к экзамену
1. Аксиомы статики.
2. Связи и их реакции.
3. Теорема о проекции равнодействующей силы на ось.
4. Сходящиеся силы. Геометрические и аналитические условия равновесия системы сходящихся сил.
5. Пара сил. Момент пары сил. Свойства пары сил. Условия равновесия системы пар.
6. Момент силы относительно точки (центра). Изображение момента силы относительно точки в виде вектора.
7. Теорема о параллельном переносе силы. (Лемма Пуансо).
8. Вычисление главного вектора и главного момента плоской системы сил.
9. Теорема Вариньона о моменте равнодействующей.
10. Аналитические условия равновесия плоской системы сил.
11. Момент силы относительно оси.
12. Зависимость между моментами силы относительно центра и относительно оси, проходящей через этот центр.
13. Аналитические условия равновесия произвольной пространственной системы сил.
14. Предмет кинематики. Задача кинематики.
15. Способы задания движения точки. Траектория точки.
16. Определение скорости и ускорения точки при векторном способе задания ее движения.
17. Определение скорости и ускорения точки при координатном способе задания ее движения.
18. Определение скорости и ускорения точки при естественном способе задания ее движения.
19. Поступательное движение твердого тела. Теорема о траекториях, скоростях и ускорениях точек твердого тела при поступательном движении.
20. Вращение твердого тела вокруг неподвижной оси. Уравнение (закон) вращательного движения твердого тела.
21. Угловая скорость и угловое ускорение твердого тела. Вектор угловой скорости и углового ускорения тела.
22. Скорость и ускорение твердого тела, вращающегося вокруг неподвижной оси.
23. Абсолютное и относительное движение точки; переносное движение. Абсолютная, относительная и переносная скорости и ускорения точки.
24. Теорема сложения скоростей.
25. Теорема сложения ускорений.
26. Ускорение Кориолиса и его вычисление.
27. Плоское движение твердого тела. Разложение движения плоской фигуры на поступательное и вращательное движения.
28. Определение скорости точек плоской фигуры.
29. Теорема о проекциях скоростей двух точек фигуры.
30. Мгновенный центр скоростей (МЦС). Определение скоростей точек плоской фигуры с помощью МЦС.
31. Предмет динамики. Основные законы динамики. Две основные задачи динамики.
32. Дифференциальные уравнения движения свободной (и несвободной) материальной точки.
33. Первая и вторая задачи динамики материальной точки. Начальные условия. Постоянные интегрирования и их определение.
34. Механическая система. Классификация сил, действующих на систему. Свойство внутренних сил.
35. Центр масс; радиус-вектор и координаты центра масс. Дифференциальные уравнения движения механической системы.
36. Теорема о движении центра масс механической системы.
37. Закон сохранения движения центра масс.
38. Количество движения материальной точки и механической системы.
39. Элементарный импульс силы. Импульс силы за конечный промежуток времени.
40. Теорема об изменении количества движения точки в дифференциальной и конечной формах.
41. Терема об изменении количества движения механической системы в дифференциальной и конечной формах.
42. Закон сохранения количества движения механической системы.
43. Момент количества движения материальной точки.
44. Теорема об изменении момента количества движения материальной точки.
45. Закон сохранения момента количества движения материальной точки.
46. Главный момент количества движения механической системы относительно центра и относительно оси. Кинетический момент твердого тела, вращающегося вокруг неподвижной оси.
47. Теорема об изменении кинетического момента механической системы.
48. Закон сохранения кинетического момента механической системы.
49. Кинетическая энергия твердого тела при поступательном и вращательном движениях. Кинетическая энергия материальной точки и механической системы.
50. Работа силы. Элементарная работа силы, аналитическое выражение элементарной работы. Работа силы на конечном перемещении точки ее приложения. Работа силы тяжести и силы упругости.
51. Теорема об изменении кинетической энергии точки.
52. Кинетическая энергия при плоскопараллельном движении твердого тела.
53. Теорема об изменении кинетической энергии механической системы.
54. Работа сил, приложенных к твердому телу, вращающемуся вокруг неподвижной оси.
55. Силы инерции материальной точки.
56. Принцип Даламбера для материальной точки.
57. Принцип Даламбера для механической системы.
58. Принцип возможных перемещений.
59. Общее уравнение динамики.
60. Обобщенные координаты. Обобщенные силы. Уравнение Лагранжа 2-го рода.
Вопросы по статике для тестового контроля знаний
1. Что называют идеальным стержнем?
2. Что такое идеальная нить?
3. Что называют цилиндрическим шарниром?
4. Что такое связь?
5. Как направляют реакцию связи типа "идеальный стержень"?
6. Как направлена реакция гладкой поверхности?
7. Как направлена реакция подвижной шарнирной опоры?
8. Как определить проекцию силы на ось?
9. Как присвоить знак проекции силы на ось?
10. Приведите полную классификацию систем сил?
11. Чем отличаются силы активные от реакций связей?
12. Сформулируйте первую (основную) форму условий равновесия произвольной плоской системы сил?
13. Почему первая форма условий равновесия произвольной плоской системы сил называется основной?
14. Сформулируйте третью форму условий равновесия произвольной плоской системы сил?
15. Из каких скалярных уравнений состоят необходимые и достаточные условия равновесия произвольной плоской системы сил?
16. Что произойдет с величиной момента силы относительно точки при переносе точки, приложения силы вдоль ее линии действия на величину, равную h?
17. В чем заключается теорема Вариньона о моменте равнодействующей относительно любого центра?
18. В каком случае момент силы относительно оси равен нулю?
19. Как определить момент силы относительно оси?
20. Как определить момент силы относительно точки?
21. В каком случае момент силы относительно точки равен нулю?
22. Как определить проекцию силы на плоскость?
23. Что такое главный вектор системы сил?
24. Что такое главный момент системы сил?
25. Чем отличается пространственная система сходящихся сил от произвольной пространственной системы сил?
26. Записать условия равновесия произвольной пространственной системы сил.
27. Записать условия равновесия пространственной системы сил, перпендикулярных оси OY.
28. Как должны быть расположены силы в пространстве, чтобы удовлетворять условиям равновесия: сумма Fкz = 0, сумма Мх(Fк) = 0, сумма Му(Fк) = 0?
29. Записать условие равновесия пространственной системы сил, параллельных оси ОХ.
30. Как должны быть расположены силы в пространстве, чтобы удовлетворялись условия равновесия: сумма Fкx = 0, сумма Fкy = 0, сумма Fкz = 0?
Вопросы по кинематике для тестового контроля знаний
1. Какое движение называется плоскопараллельным?
2. Где находится МЦС данного тела?
3. В чем заключается теорема о проекциях скоростей двух точек плоской фигуры?
4. Как определить угловую скорость тела по величине скорости точки А и положению МЦС?
5. Если МЦС находится в бесконечности, то...
6. Как определить ускорение точки В плоской фигуры?
7. Как определить величину скорости точки А по известной угловой скорости и положению МЦС?
8. Где находится МЦС тела при качении его без скольжения по неподвижной поверхности?
9. Где находится МЦС, если известны направления скоростей двух его точек?
10. Если МЦС находится в бесконечности, то что можно сказать о скоростях всех точек плоской фигуры?
11. Какое движение называется относительным?
12. Какое движение называется переносным?
13. Какое движение называется абсолютным?
14. Как определяется модуль абсолютной скорости, если вектор относительной скорости перпендикулярен вектору переносной скорости?
15. Какая формулировка соответствует теореме о сложении скоростей при сложном движении?
16. По какой формуле вычисляется модуль скорости абсолютного движения, если угол между направлениями векторов скорости относительного и переносного движения равен  ?
?
17. Как определяется абсолютное ускорение точки при сложном движении?
18. Как определяется направление ускорения Кориолиса?
19. Как определяется величина ускорения Кориолиса?
20. В каком случае ускорение Кориолиса равно 0?
Вопросы по динамике для тестового контроля знаний
1. Что такое динамика?
2. Что такое материальная точка?
3. Сформулируйте основной закон динамики.
4. Сформулируйте первую (прямую) задачу динамики материальной точки.
5. Сформулируйте обратную задачу динамики.
6. Как определяются постоянные интегрирования?
7. Что входит в начальные условия?
8. Что называют центром масс механической системы?
9. Теорема о движении центра масс формулируется так:
10. Количество движения материальной точки – это...
11. Как направлен вектор количества движения материальной точки?
12. Как формулируется теорема об изменении количества движения материальной точки в дифференциальной форме?
13. Количество движения системы – это...
14. Теорема об изменении количества движения системы в интегральной форме формулируется следующим образом:
15. Что такое кинетический момент системы относительно определённого центра?
16. Как определяется кинетический момент твёрдого тела относительно оси вращения?
17. Кинетическая энергия системы равна:
18. Кинетическая энергия при вращательном движении равна:
19. При плоскопараллельном движении кинетическая энергия тела равна:
20. Как формулируется теорема об изменении кинетической энергии системы в интегральной форме.
21. Как формулируется теорема об изменении кинетической энергии материальной точки в интегральной форме?
22. Чему равна работа постоянной силы F на перемещении S?
23. Сформулируйте принцип Даламбера для материальной точки.
24. Сформулировать принцип Даламбера для механической системы.
25. Что такое сила инерции, действующая на материальную точку?
КОНТРОЛЬНЫЕ ЗАДАНИЯ
Методические указания к выполнению контрольных заданий
Студенты выполняют два контрольных задания (две работы).
Задание 1 (статика и кинематика) – задачи С1, С2, К1, К2, КЗ.
Задание 2 (динамика) – задачи Д1, Д2, ДЗ, Д4, Д5.
К каждой задаче дается 10 рисунков и таблица (с тем же номером, что и задача), содержащая дополнительные к тексту задачи условия. Нумерация рисунков двойная, при этом номером рисунка является цифра, стоящая после точки. Например, рис. С1.4 – это рис. 4 к задаче С1 и т. д. (в тексте задачи при повторных ссылках на рисунок пишется просто рис. 4 и т. д.). Номера условий от 0 до 9 проставлены в 1-м столбце (или в 1-й строке) таблицы.
Студент во всех задачах выбирает номер рисунка по предпоследней цифре шифра, а номер условия в таблице – по последней; например, если шифр оканчивается числом 46, то берет рис. 4 и условия № 6 из таблицы.
Каждое задание выполняется в отдельной тетради. На обложке указываются: название дисциплины, номер работы, фамилия и инициалы студента, учебный шифр, факультет, специальность и адрес. На первой странице тетради записываются: номер работы, номера решаемых задач и год издания контрольных заданий.
Решение каждой задачи обязательно начинать на развороте тетради (на четной странице, начиная со второй, иначе работу трудно проверять). Сверху указывается номер задачи, далее делается чертеж и записывается, что в задаче дано и что требуется определить (текст задачи не переписывать). Чертеж выполняется с учетом условий решаемого варианта задачи; на нем все углы, действующие силы, число тел и их расположение на чертеже должны соответствовать этим условиям. В результате в целом ряде задач чертеж получится более простой, чем общий.
Чертеж должен быть аккуратным и наглядным, а его размеры должны позволять ясно показать все силы или векторы скорости и ускорения и др.; показывать все эти векторы и координатные оси на чертеже, а также указывать единицы получаемых величин обязательно. Решение задач необходимо сопровождать краткими пояснениями (какие формулы или теоремы применяются, откуда получаются те или иные результаты и т. п.) и подробно излагать весь ход расчетов. На каждой странице следует оставлять поля для замечаний рецензента.
Работы, не отвечающие всем перечисленным требованиям, проверяться не будут и будут возвращаться для доработки. К работе, высылаемой на повторную проверку (если она выполнена в другой тетради), должна обязательно прилагаться незачтенная работа. На экзамене необходимо представить зачтенные по данному разделу курса работы, в которых все отмеченные рецензентом погрешности должны быть исправлены.
При чтении текста каждой задачи учесть следующее. Большинство рисунков дано без соблюдения масштаба. На рисунках к задачам С1 – СЗ и Д1 – Д5 все линии, параллельные строкам, считаются горизонтальными, а перпендикулярные строкам – вертикальными, и это в тексте задач специально не оговаривается. Также без оговорок считается, что все нити (веревки, тросы) являются нерастяжимыми и невесомыми, нити, перекинутые через блок, по блоку не скользят, катки и колеса (в кинематике и динамике) катятся по плоскостям без скольжения. Все связи считаются идеальными.
Когда тела на рисунке пронумерованы, то в тексте задачи и в таблице Р1,l1 r1 и т. п. означают вес или размеры тела 1, Р2, /2, r2, – тела 2 и т. д. Аналогично в кинематике и динамике. В каждой задаче подобные обозначения могут тоже специально не оговариваться. Следует также иметь в виду, что некоторые из заданных в условиях задачи величин (размеров) при решении каких-нибудь вариантов могут не понадобиться, они нужны для решения других вариантов задачи. Из всех пояснений в тексте задачи обращайте внимание только на относящиеся к вашему варианту.
Методические указания по решению задач, входящих в контрольные задания, даются для каждой задачи после изложения ее текста под рубрикой "Указания"; затем дается пример решения аналогичной задачи. Цель примера – разъяснить ход решения, но не воспроизвести его полностью. Поэтому в ряде случаев промежуточные расчеты опускаются. Но при выполнении задания все преобразования и числовые расчеты должны быть обязательно последовательно проделаны с необходимыми пояснениями; в конце должны быть даны ответы.
ЗАДАЧИ К КОНТРОЛЬНЫМ ЗАДАНИЯМ
СТАТИКА
Задача С1
Жесткая рама (рис. С1.0-С1.9, табл. С1) закреплена в точке А шарнирно, а в точке В прикреплена или к невесомому стержню ВВ, или к шарнирной опоре на катках; стержень прикреплен к раме и к неподвижной опоре шарнирами. 

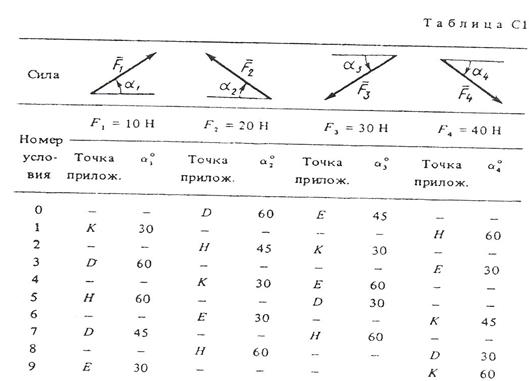
На раму действуют пара сил с моментом М = 100 Н • м и две силы, значения которых, направления и точки приложения указаны в таблице. Определить реакции связей в точках А и В, вызываемые заданными нагрузками. При подсчетах принять  = 0,5 м.
= 0,5 м.